![]() ഉപയോക്തൃ മാനുവൽ
ഉപയോക്തൃ മാനുവൽ
സ്ക്സ്ഹോക്ക്
ഡിജിറ്റൽ വേഗതയിൽ പറക്കാൻ
HAWK വേരിയോമീറ്റർ
പതിപ്പ് 9 
പ്രധാനപ്പെട്ട അറിയിപ്പുകൾ
വിവേകപൂർണ്ണമായ നാവിഗേഷനുള്ള ഒരു സഹായമായി മാത്രം VFR ഉപയോഗത്തിനായി LXNAV SxHAWK സിസ്റ്റം രൂപകൽപ്പന ചെയ്തിരിക്കുന്നു. എല്ലാ വിവരങ്ങളും റഫറൻസിനായി മാത്രമാണ് അവതരിപ്പിച്ചിരിക്കുന്നത്. സാഹചര്യ അവബോധത്തിനുള്ള ഒരു സഹായമായി മാത്രമാണ് ഭൂപ്രദേശം, വിമാനത്താവളങ്ങൾ, വ്യോമാതിർത്തി ഡാറ്റ എന്നിവ നൽകിയിരിക്കുന്നത്.
ഈ പ്രമാണത്തിലെ വിവരങ്ങൾ അറിയിപ്പ് കൂടാതെ മാറ്റത്തിന് വിധേയമാണ്. അത്തരം മാറ്റങ്ങളോ മെച്ചപ്പെടുത്തലുകളോ ഏതെങ്കിലും വ്യക്തിയെയോ ഓർഗനൈസേഷനെയോ അറിയിക്കേണ്ട ബാധ്യതയില്ലാതെ അവരുടെ ഉൽപ്പന്നങ്ങൾ മാറ്റാനോ മെച്ചപ്പെടുത്താനോ ഈ മെറ്റീരിയലിന്റെ ഉള്ളടക്കത്തിൽ മാറ്റങ്ങൾ വരുത്താനുമുള്ള അവകാശം LXNAV-ൽ നിക്ഷിപ്തമാണ്.
![]() LXNAV SxHAWK സിസ്റ്റം പ്രവർത്തിപ്പിക്കുന്നതിന് പ്രധാനപ്പെട്ടതും ശ്രദ്ധാപൂർവ്വം വായിക്കേണ്ടതുമായ മാനുവലിന്റെ ഭാഗങ്ങൾക്കായി ഒരു മഞ്ഞ ത്രികോണം കാണിച്ചിരിക്കുന്നു.
LXNAV SxHAWK സിസ്റ്റം പ്രവർത്തിപ്പിക്കുന്നതിന് പ്രധാനപ്പെട്ടതും ശ്രദ്ധാപൂർവ്വം വായിക്കേണ്ടതുമായ മാനുവലിന്റെ ഭാഗങ്ങൾക്കായി ഒരു മഞ്ഞ ത്രികോണം കാണിച്ചിരിക്കുന്നു.
![]() ചുവന്ന ത്രികോണമുള്ള കുറിപ്പുകൾ നിർണായകമായ നടപടിക്രമങ്ങളെ വിവരിക്കുന്നു, അത് ഡാറ്റ നഷ്ടപ്പെടാനോ മറ്റേതെങ്കിലും ഗുരുതരമായ സാഹചര്യത്തിനോ കാരണമായേക്കാം.
ചുവന്ന ത്രികോണമുള്ള കുറിപ്പുകൾ നിർണായകമായ നടപടിക്രമങ്ങളെ വിവരിക്കുന്നു, അത് ഡാറ്റ നഷ്ടപ്പെടാനോ മറ്റേതെങ്കിലും ഗുരുതരമായ സാഹചര്യത്തിനോ കാരണമായേക്കാം.
![]() വായനക്കാരന് ഉപയോഗപ്രദമായ ഒരു സൂചന നൽകുമ്പോൾ ഒരു ബൾബ് ഐക്കൺ കാണിക്കുന്നു.
വായനക്കാരന് ഉപയോഗപ്രദമായ ഒരു സൂചന നൽകുമ്പോൾ ഒരു ബൾബ് ഐക്കൺ കാണിക്കുന്നു.
1.1 ലിമിറ്റഡ് വാറൻ്റി
ഈ LXNAV SxHAWK ഉൽപ്പന്നം വാങ്ങിയ തീയതി മുതൽ രണ്ട് വർഷത്തേക്ക് മെറ്റീരിയലുകളിലോ വർക്ക്മാൻഷിപ്പിലോ ഉള്ള തകരാറുകൾ ഇല്ലാത്തതായിരിക്കണമെന്ന് വാറണ്ടിയുണ്ട്. ഈ കാലയളവിനുള്ളിൽ, സാധാരണ ഉപയോഗത്തിൽ പരാജയപ്പെടുന്ന ഏതെങ്കിലും ഘടകങ്ങൾ LXNAV അതിന്റെ സ്വന്തം വിവേചനാധികാരത്തിൽ നന്നാക്കുകയോ മാറ്റിസ്ഥാപിക്കുകയോ ചെയ്യും. അത്തരം അറ്റകുറ്റപ്പണികൾ അല്ലെങ്കിൽ മാറ്റിസ്ഥാപിക്കൽ ഭാഗങ്ങൾക്കും ജോലിക്കും ഉപഭോക്താവിൽ നിന്ന് യാതൊരു നിരക്കും ഈടാക്കാതെ നടത്തും, ഏതെങ്കിലും ഗതാഗത ചെലവിന് ഉപഭോക്താവ് ഉത്തരവാദിയായിരിക്കും. ദുരുപയോഗം, ദുരുപയോഗം, അപകടം അല്ലെങ്കിൽ അനധികൃത മാറ്റങ്ങൾ അല്ലെങ്കിൽ അറ്റകുറ്റപ്പണികൾ എന്നിവ മൂലമുള്ള പരാജയങ്ങൾ ഈ വാറന്റിയിൽ ഉൾപ്പെടുന്നില്ല.
ഒരു പ്രത്യേക ഉദ്ദേശ്യത്തിന്റെയോ പ്രമാണത്തിന്റെയോ ഫിറ്റ്യൂട്ടിന്റെയോ ഒരു വാറന്റിന് കീഴിലുള്ള ഏതെങ്കിലും ബാധ്യതകൾ ഉൾപ്പെടെയുള്ള ഏതെങ്കിലും ബാധ്യതകൾ ഉൾപ്പെടെയുള്ള മറ്റ് വാറന്റിറ്റികളോ നിയമപരമോ ഉൾപ്പെടെയുള്ള മറ്റൊരു വാറണ്ടിലും ഉൾപ്പെടെയുള്ള വാറണ്ടികളും പരിഹാരവുമാണ്. ഈ വാറന്റി നിങ്ങൾക്ക് പ്രത്യേക നിയമപരമായ അവകാശങ്ങൾ നൽകുന്നു, അത് സംസ്ഥാനം മുതൽ സംസ്ഥാനം വരെ വ്യത്യാസപ്പെടാം.
ഈ ഉൽപ്പന്നത്തിന്റെ ഉപയോഗം, ദുരുപയോഗം, അല്ലെങ്കിൽ ഉപയോഗിക്കാനുള്ള കഴിവില്ലായ്മ എന്നിവയിൽ നിന്നുള്ള ഏതെങ്കിലും യാദൃശ്ചികമോ പ്രത്യേകമോ പരോക്ഷമോ അനന്തരമോ ആയ നാശനഷ്ടങ്ങൾക്ക് LXNAV ഒരു കാരണവശാലും ബാധ്യസ്ഥനായിരിക്കില്ല. ചില സംസ്ഥാനങ്ങൾ ആകസ്മികമോ അനന്തരഫലമോ ആയ നാശനഷ്ടങ്ങൾ ഒഴിവാക്കാൻ അനുവദിക്കുന്നില്ല, അതിനാൽ മുകളിൽ പറഞ്ഞ പരിമിതികൾ നിങ്ങൾക്ക് ബാധകമായേക്കില്ല. യൂണിറ്റ് അല്ലെങ്കിൽ സോഫ്റ്റ്വെയർ നന്നാക്കുന്നതിനോ മാറ്റിസ്ഥാപിക്കുന്നതിനോ അല്ലെങ്കിൽ അതിന്റെ സ്വന്തം വിവേചനാധികാരത്തിൽ വാങ്ങിയ വിലയുടെ പൂർണ്ണമായ റീഫണ്ട് വാഗ്ദാനം ചെയ്യുന്നതിനോ ഉള്ള പ്രത്യേക അവകാശം LXNAV നിലനിർത്തുന്നു. അത്തരം പ്രതിവിധി വാറന്റിയുടെ ഏതെങ്കിലും ലംഘനത്തിനുള്ള നിങ്ങളുടെ ഏകവും പ്രത്യേകവുമായ പ്രതിവിധിയായിരിക്കും.
വാറന്റി സേവനം ലഭിക്കുന്നതിന്, നിങ്ങളുടെ പ്രാദേശിക LXNAV ഡീലറെ ബന്ധപ്പെടുക അല്ലെങ്കിൽ LXNAV നേരിട്ട് ബന്ധപ്പെടുക.
റിവിഷൻ ചരിത്രം
| തീയതി | പുനരവലോകനം | പരിഷ്കരിച്ചത് | വിവരണം |
| ഡിസംബർ 2024 | 1 | UK | ഈ മാനുവലിന്റെ പ്രാരംഭ റിലീസ് |
| 2024 ജനുവരി | 2 | UK | ചെറിയ തിരുത്തലുകൾ |
പാക്കിംഗ് ലിസ്റ്റുകൾ
- LXNAV SxHAWK മെയിൻ യൂണിറ്റ്
- SxHAWK + CAN ടെർമിനേറ്ററിനുള്ള പ്രധാന പവർ കേബിൾ
- സ്പീക്കർ
- ഫ്ലാം കേബിൾ (ഓപ്ഷണൽ)
- PDA കേബിൾ (ഓപ്ഷണൽ)
- 2×6 എംഎം സ്ക്രൂ
- ബ്ലൂടൂത്ത് ആന്റിന
- ജിപിഎസ് ആൻ്റിന
- ബാരോഗ്രാം കാലിബ്രേഷൻ ചാർട്ട്

രണ്ടാമത്തെ സീറ്റ് (ഓപ്ഷണൽ):
- പ്രധാന SxHAWKD യൂണിറ്റ്
- Y കേബിൾ സ്പ്ലിറ്റർ (ഓപ്ഷണൽ, റിമോട്ട് സ്റ്റിക്ക് ഉപയോഗിച്ച് മാത്രം)
- മെയിൻ 3 മീറ്റർ CAN കേബിൾ
2.1 SxHAWK (57mm) വേരിയോമീറ്റർ യൂണിറ്റ്
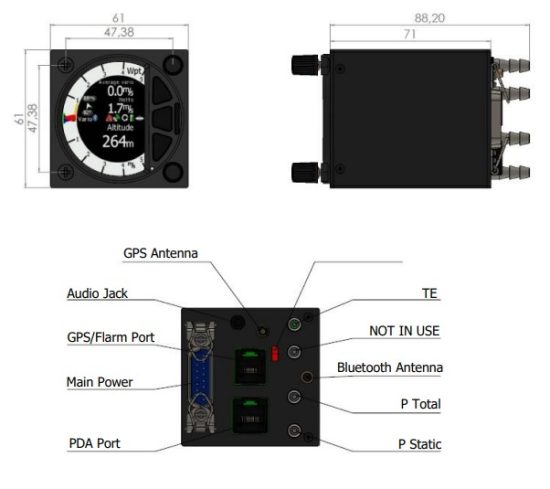
2.2 SxHAWK (80mm) വേരിയോമീറ്റർ യൂണിറ്റ് 
അടിസ്ഥാനകാര്യങ്ങൾ
3.1 LXNAV SxHAWK ഒറ്റനോട്ടത്തിൽ
LXNAV SxHAWK ഒരു ഒറ്റപ്പെട്ട ഡിജിറ്റൽ HAWK വേരിയോമീറ്ററാണ്. LXNAV SxHAWK-യിൽ GPS/FLARM, PDA/PNA ഇൻപുട്ട്/ഔട്ട്പുട്ട് എന്നിവയുണ്ട്. 80 mm വ്യാസം (3.15”) അല്ലെങ്കിൽ 57 mm വ്യാസമുള്ള ഒരു ഗ്ലൈഡർ പാനലിലേക്ക് ഘടിപ്പിക്കാവുന്ന സ്റ്റാൻഡേർഡ് അളവുകൾ ഈ യൂണിറ്റിനുണ്ട്. പവർ (5VDC/1A) ഉള്ള ഒരു PDA/PNA നൽകാനും ഇതിന് കഴിയും. യൂണിറ്റിന് ഒരു സംയോജിത ഉയർന്ന കൃത്യതയുള്ള ഡിജിറ്റൽ പ്രഷർ സെൻസറും ഇനേർഷ്യൽ പ്ലാറ്റ്ഫോമും ഉണ്ട്. സെൻസറുകൾ s ആണ്.ampസെക്കൻഡിൽ 100 തവണയിൽ കൂടുതൽ ലീഡ് ചെയ്യുന്നു. QVGA 4×320 പിക്സൽ, 240-ഇഞ്ച് (SxHAWK 3.5mm) അല്ലെങ്കിൽ 80-ഇഞ്ച് (SxHAWK), ഉയർന്ന തെളിച്ചം (2.5 nits) കളർ ഡിസ്പ്ലേയിൽ പ്രദർശിപ്പിച്ചിരിക്കുന്ന 1200 വേരിയബിൾ ന്യൂമറിക് ഫീൽഡുകൾ വരെയുള്ള ഒരു വേരിയൊ സൂചികൾ വഴി റിയൽ ടൈം ഡാറ്റ പ്രദർശിപ്പിക്കുന്നു. മൂല്യങ്ങളും ക്രമീകരണങ്ങളും ക്രമീകരിക്കുന്നതിന് LXNAV SxHAWK-യിൽ രണ്ട് റോട്ടറി പുഷ് ബട്ടൺ നോബുകളും മൂന്ന് അധിക പുഷ് ബട്ടണുകളും ഉണ്ട്.
CAN ബസ് വഴി ഒന്നോ അതിലധികമോ റിപ്പീറ്ററുകൾ ഉപയോഗിച്ച് LXNAV SxHAWK വികസിപ്പിക്കാൻ കഴിയും. രണ്ട് സീറ്റുകളുള്ള ഗ്ലൈഡറിലെ രണ്ട് പൈലറ്റുമാർക്കും മുൻ സീറ്റിലോ പിൻ സീറ്റിലോ ഉള്ള ഓരോ യൂണിറ്റിന്റെയും എല്ലാ പ്രവർത്തനങ്ങളുടെയും സ്വതന്ത്ര നിയന്ത്രണം ഇത് അനുവദിക്കുന്നു. SxHAWK യൂണിറ്റിൽ ഒരു ബിൽറ്റ്-ഇൻ IGC-അംഗീകൃത ഫ്ലൈറ്റ് റെക്കോർഡർ, ഒരു ബ്ലൂടൂത്ത് മൊഡ്യൂൾ, 3 മുതൽ 4.5 മണിക്കൂർ വരെ സ്വതന്ത്ര പ്രവർത്തനം നൽകുന്ന സ്വന്തം ബാക്കപ്പ് ബാറ്ററി എന്നിവ ഉൾപ്പെടുന്നു.
SxHAWK യൂണിറ്റിൽ ഒരു ബിൽറ്റ്-ഇൻ IGC-അംഗീകൃത ഫ്ലൈറ്റ് റെക്കോർഡർ, ഒരു ബ്ലൂടൂത്ത് മൊഡ്യൂൾ, 3 മുതൽ 4.5 മണിക്കൂർ വരെ സ്വതന്ത്ര പ്രവർത്തനം നൽകുന്ന സ്വന്തം ബാക്കപ്പ് ബാറ്ററി എന്നിവ ഉൾപ്പെടുന്നു.
SxHAWK-യ്ക്ക് HAWK സിസ്റ്റം പ്രവർത്തിപ്പിക്കാനും കഴിയും, ഇത് പൈലറ്റിന് തത്സമയ ത്രിമാന കാറ്റ് നൽകുന്നു. HAWK-നെക്കുറിച്ച് നിങ്ങൾക്ക് 7-ാം അധ്യായത്തിൽ കൂടുതലറിയാൻ കഴിയും.
3.2 LXNAV SxHAWK സവിശേഷതകൾ
- എല്ലാ സൂര്യപ്രകാശ സാഹചര്യങ്ങളിലും വായിക്കാവുന്നതും ബാക്ക്ലൈറ്റ് ക്രമീകരിക്കാനുള്ള കഴിവുള്ളതുമായ വളരെ തിളക്കമുള്ള 3.5'' (SxHAWK 80MM) അല്ലെങ്കിൽ 2.5" (SxHAWK) QVGA കളർ ഡിസ്പ്ലേ.
- ഇൻപുട്ടിനായി പുഷ് ബട്ടൺ ഫംഗ്ഷനുള്ള രണ്ട് റോട്ടറി സ്വിച്ചുകളും മൂന്ന് പുഷ് ബട്ടണുകളും ഉപയോഗിക്കുന്നു.
- മിക്കവാറും എല്ലാ ഗ്ലൈഡറുകൾക്കുമായി മുൻകൂട്ടി ലോഡുചെയ്ത പോളാർ ഡാറ്റാബേസ്.
- GPS/FLARM, PDA/PNA ഇൻപുട്ട്/ഔട്ട്പുട്ട്.
- ഒരു FLARM GPS/FLARM പോർട്ടുമായി ബന്ധിപ്പിച്ചിട്ടുണ്ടോ എന്നതിന്റെ FLARM സൂചന.
- നെറ്റ്ടോ വെർട്ടിക്കൽ സ്പീഡ്, റിലേറ്റീവ് (സൂപ്പർ നെറ്റോ), വെർട്ടിക്കൽ സ്പീഡ് (വേരിയോ) തുടങ്ങിയ തിരഞ്ഞെടുക്കാവുന്ന ഡാറ്റയ്ക്കായി പ്രോഗ്രാം ചെയ്യാവുന്ന "സൂചികൾ".
- ശരാശരി, തെർമൽ വേരിയൊ, സമയം, വേഗത തുടങ്ങിയ അധിക വിവരങ്ങൾക്കായി 320×240 പിക്സൽ കളർ സ്ക്രീൻ...
- നിരവധി ഇഷ്ടാനുസൃത ഓഡിയോ ക്രമീകരണങ്ങൾ.
- 100Hz സെക്കന്റ്ampവളരെ വേഗത്തിലുള്ള പ്രതികരണത്തിനുള്ള ലിംഗ് നിരക്ക്.
- വേഗതയിൽ നിന്ന് പറക്കാനുള്ള സൂചന.
- TE നഷ്ടപരിഹാരം ന്യൂമാറ്റിക് TE പ്രോബ് അല്ലെങ്കിൽ ഇലക്ട്രോണിക് TE ആയി തിരഞ്ഞെടുക്കാം.
- ഇഷ്ടാനുസൃത വേരിയോ ശബ്ദ പ്രകടനത്തിനായി ഓഡിയോ സമനില.
- ഓഡിയോ തെർമൽ അസിസ്റ്റന്റ്.
- ബിൽറ്റ്-ഇൻ ഉയർന്ന ലെവൽ, IGC അംഗീകൃത ഫ്ലൈറ്റ് റെക്കോർഡർ.
- ബിൽറ്റ്-ഇൻ ബ്ലൂടൂത്ത് മൊഡ്യൂൾ.
- ബാക്കപ്പ് ബാറ്ററി.
- എഞ്ചിൻ ശബ്ദ നില സെൻസർ (ENL).
- അന്തർനിർമ്മിത ജിപിഎസ് മൊഡ്യൂൾ.
3.2.1 ഇന്റർഫേസുകൾ
- RS232 ലെവലിൽ FLARM പോർട്ട് ഇൻപുട്ട്/ഔട്ട്പുട്ട് (RJ12 കണക്റ്റർ, നോൺ-സ്റ്റാൻഡേർഡ് IGC) (12V/2A)
- 232V പവർ സപ്ലൈ (5 പിൻ RJ 8, 45V / 5A) ഉള്ള PDA/PNA ഉപകരണങ്ങൾക്കായി RS1 അല്ലെങ്കിൽ TTL ലെവലിൽ PDA പോർട്ട് ഇൻപുട്ട്/ഔട്ട്പുട്ട്.
- ഓഡിയോ പോർട്ട് (സ്റ്റാൻഡേർഡ് 3 എംഎം ഫോൺ ജാക്ക്).
- SxHAWKD റിപ്പീറ്റർ, റിമോട്ട് സ്റ്റിക്ക് (CAN റിമോട്ട്), MOP1 സെൻസർ എന്നിവയിലേക്ക് എക്സ്റ്റൻഷൻ ചെയ്യുന്നതിനുള്ള 2Mbit CAN ബസ്.
3.2.2 ഓപ്ഷനുകൾ
ഒരു CAN ബസ് സിസ്റ്റം ഉപയോഗിച്ച്, രണ്ടാമത്തെ സീറ്റ് ഉപകരണം ബന്ധിപ്പിക്കാൻ കഴിയും. ഗ്ലൈഡറിന്റെ പിൻ സീറ്റിൽ സ്ഥാപിച്ചിരിക്കുന്ന യൂണിറ്റ് സ്വതന്ത്രമായി പ്രവർത്തിക്കുകയും പ്രധാന യൂണിറ്റിൽ നിന്ന് ആവശ്യമായ എല്ലാ ഡാറ്റയും സ്വീകരിക്കുകയും ചെയ്യുന്നു. രണ്ട് യൂണിറ്റുകൾക്കിടയിലുള്ള ആശയവിനിമയം CAN ബസ് സിസ്റ്റം വഴി മാത്രമാണ്.
(റിമോട്ട് സ്റ്റിക്ക്, സെക്കൻഡ് സീറ്റ് ഉപകരണം).
3.2.3 സാങ്കേതിക ഡാറ്റ
പവർ ഇൻപുട്ട് 10-28 V DC.
3.2.3.1 വൈദ്യുതി ഉപഭോഗം
| ഉപകരണം | കുറഞ്ഞ തെളിച്ചം (mA) | പരമാവധി തെളിച്ചം (mA) | പരമാവധി ചാർജ് കറന്റ് (mA) |
| സ്ക്സ്ഹോക്ക് | 170-ന് (12V) | 340-ന് (12V) | കൂടാതെ, 220mA വരെ |
| സ്ക്സ്ഹോക്ക് 80 മീ. | 190-ന് (12V) | 320-ന് (12V) | കൂടാതെ, 220mA വരെ |
![]() തെളിച്ചമുള്ള ഡിസ്പ്ലേകളും ഉപഭോഗവും ഉപയോഗിക്കുന്ന പുതിയ മോഡലുകൾ 3W വരെ ഉയർന്നതായിരിക്കാം.
തെളിച്ചമുള്ള ഡിസ്പ്ലേകളും ഉപഭോഗവും ഉപയോഗിക്കുന്ന പുതിയ മോഡലുകൾ 3W വരെ ഉയർന്നതായിരിക്കാം.
3.2.3.2 വലിപ്പവും ഭാരവും
| ഉപകരണം | വലിപ്പം | ഭാരം (ഗ്രാം) |
| എസ് 10 | 57 എംഎം കട്ട്-ഔട്ട് 61x61x70 എംഎം | 348 |
| എസ് 100 | 80 എംഎം (3.15″) സ്റ്റാൻഡേർഡ് എയർക്രാഫ്റ്റ് കട്ട്-ഔട്ട് 81x81x64 മിമി | 515 |
3.2.3.3 ഓഡിയോ ഔട്ട്പുട്ട് പവർ
യൂണിറ്റിന് ഡി ക്ലാസ് ഉണ്ട് ampലിഫയർ. ഔട്ട്പുട്ട് പവർ സ്പീക്കർ ഇംപെഡൻസിനെ ആശ്രയിച്ചിരിക്കുന്നു.
- 2.6Ω സ്പീക്കറോട് കൂടിയ 4W
- 1.65Ω സ്പീക്കറോട് കൂടിയ 8W.
3.2.3.4 പരിസ്ഥിതി പരിമിതികൾ
- പ്രവർത്തന താപനില: -20°C മുതൽ +70°C വരെ
- സംഭരണ താപനില: -30°C മുതൽ +85°C വരെ
- ആപേക്ഷിക ആർദ്രത: 0% -95%
സിസ്റ്റം വിവരണം
4.1 പുഷ് ബട്ടൺ - റോട്ടറി സ്വിച്ചുകൾ
രണ്ട് റോട്ടറി സ്വിച്ചുകൾക്കും ഒരു പുഷ് ബട്ടൺ ഫംഗ്ഷനുമുണ്ട്. LXNAV SxHAWK പുഷ് ബട്ടണിന്റെ ഹ്രസ്വമോ ദീർഘമോ ആയ അമർത്തലുകൾ കണ്ടെത്തുന്നു. ഒരു ചെറിയ അമർത്തൽ എന്നാൽ ഒരു ക്ലിക്ക് മാത്രമാണ്, ഒരു നീണ്ട അമർത്തൽ എന്നാൽ ഒരു സെക്കൻഡിൽ കൂടുതൽ ബട്ടൺ അമർത്തുക എന്നാണ്.
4.1.1 പവർ ബട്ടൺ
ഏതെങ്കിലും പുഷ് ബട്ടണുകൾ അമർത്തിയോ അല്ലെങ്കിൽ റോട്ടറി നോബുകൾ അമർത്തിയോ ആണ് സിസ്റ്റം പവർ ചെയ്യുന്നത്. മുകളിലെ റോട്ടറി നോബിൽ ദീർഘനേരം അമർത്തിയാൽ SxHAWK ഓഫാകും. ഏവിയോണിക്സ് മാസ്റ്റർ സ്വിച്ചിന് പകരം ഇത് ഉപയോഗിക്കുക.
4.2 റോട്ടറി സ്വിച്ചുകൾ
മുകളിലെ റോട്ടറി നോബ് ഡയറക്ട് വോളിയം നിയന്ത്രണത്തിനായി രൂപകൽപ്പന ചെയ്തിട്ടുള്ളതാണ്. മുകളിലെ റോട്ടറി നോബിൽ ഒരു ഹ്രസ്വ-അമർത്തൽ ഓപ്ഷനുകൾക്കിടയിൽ തിരഞ്ഞെടുക്കാനും Vario, സ്പീച്ച്, FLARM ബീപ്പ് എന്നിവയ്ക്കായി വോളിയം ക്രമീകരിക്കാനുമുള്ള ഒരു ഓപ്ഷൻ നൽകും.
മുകളിലെ റോട്ടറി നോബിൽ ദീർഘനേരം അമർത്തിയാൽ സിസ്റ്റം വൃത്തിയായി ഷട്ട്ഡൗൺ ചെയ്യും. നിലവിലെ മോഡിൽ അല്ലെങ്കിൽ മെനുകൾക്കുള്ളിൽ ക്രമീകരണങ്ങൾ ക്രമീകരിക്കാൻ താഴത്തെ റോട്ടറി നോബ് ഉപയോഗിക്കുന്നു.
നിലവിലെ മോഡിൽ അല്ലെങ്കിൽ മെനുകൾക്കുള്ളിൽ ക്രമീകരണങ്ങൾ ക്രമീകരിക്കാൻ താഴത്തെ റോട്ടറി നോബ് ഉപയോഗിക്കുന്നു.
താഴെയുള്ള റോട്ടറി പുഷ് ബട്ടൺ ഉപയോഗിച്ച്, MC, ബാലസ്റ്റ്, ബഗ്സ് ക്രമീകരണങ്ങൾക്കിടയിൽ ടോഗിൾ ചെയ്യാൻ കഴിയും. മറ്റെല്ലാ മെനുകളിലും മൂല്യങ്ങൾ സജ്ജീകരിക്കുന്നതിനും ടെക്സ്റ്റുകൾ എഡിറ്റ് ചെയ്യുന്നതിനും ഈ നോബ് ഉപയോഗിക്കുന്നു.
4.3 ബട്ടണുകൾ (മൂന്ന്)
രണ്ട് റോട്ടറി നോബുകൾക്കിടയിലുള്ള മൂന്ന് ബട്ടണുകൾക്ക് നിശ്ചിത പ്രവർത്തനങ്ങൾ ഉണ്ട്. മുകളിലെ ബട്ടൺ ESC (CANCEL), മധ്യഭാഗം മോഡുകൾക്കിടയിൽ മാറാനുള്ളതാണ്, താഴെയുള്ള ബട്ടൺ ENTER (OK) ബട്ടണുമാണ്.
4.4 യൂണിറ്റ് സ്വിച്ചുചെയ്യുന്നു
ഏതെങ്കിലും ബട്ടണുകളോ റോട്ടറി നോബുകളോ അമർത്തുന്നത് SxHAWK ഓണാക്കും. ആദ്യത്തെ LXNAV സ്വാഗത സ്ക്രീൻ സിസ്റ്റം വിവരങ്ങളോടെ ദൃശ്യമാകും (ഉപകരണത്തിന്റെ പേര്, പതിപ്പ്, സീരിയൽ നമ്പർ...)
ബൂട്ട് നടപടിക്രമം പൂർത്തിയാകുമ്പോൾ സെറ്റപ്പ് എലവേഷൻ ഡയലോഗ് പ്രദർശിപ്പിക്കും.
ഉപയോക്താവ് താഴെയുള്ള റോട്ടറി ബട്ടൺ ഉപയോഗിച്ച് എലവേഷൻ അല്ലെങ്കിൽ ക്യുഎൻഎച്ച് സജ്ജീകരിക്കണം. താഴെയുള്ള റോട്ടറി ബട്ടൺ അമർത്തിയാൽ, ഉപയോക്താവിന് എലവേഷൻ, ക്യുഎൻഎച്ച് ഡയലോഗുകൾക്കിടയിൽ മാറാൻ കഴിയും. ക്രമീകരണങ്ങൾ സജ്ജമാക്കിയ ഉടൻ തന്നെ മുന്നോട്ട് പോകാൻ മധ്യ ബട്ടൺ അമർത്തണം.
മുകളിലെ പുഷ് ബട്ടണിന് പവർ ഓഫ് ഫംഗ്ഷനും ഉണ്ട്.
4.5 ഉപയോക്തൃ ഇൻപുട്ട്
LXNAV SxHAWK ഉപയോക്തൃ ഇന്റർഫേസിൽ വിവിധ ഇൻപുട്ട് നിയന്ത്രണങ്ങളുള്ള ഡയലോഗുകൾ അടങ്ങിയിരിക്കുന്നു.
പേരുകൾ, പാരാമീറ്ററുകൾ മുതലായവയുടെ ഇൻപുട്ട് കഴിയുന്നത്ര എളുപ്പമാക്കുന്നതിനാണ് അവ രൂപകൽപ്പന ചെയ്തിരിക്കുന്നത്. ഇൻപുട്ട് നിയന്ത്രണങ്ങളെ ഇങ്ങനെ സംഗ്രഹിക്കാം:
- ടെക്സ്റ്റ് എഡിറ്റർ
- സ്പിൻ നിയന്ത്രണങ്ങൾ (തിരഞ്ഞെടുപ്പ് നിയന്ത്രണം)
- ചെക്ക്ബോക്സുകൾ
- സ്ലൈഡർ നിയന്ത്രണം
ഒരു നിയന്ത്രണത്തിൽ നിന്ന് മറ്റൊന്നിലേക്ക് ഫംഗ്ഷൻ മാറ്റാൻ, താഴെയുള്ള റോട്ടറി നോബ് ഇനിപ്പറയുന്ന രീതിയിൽ തിരിക്കുക:
- ഘടികാരദിശയിൽ തിരിക്കുന്നത് അടുത്ത നിയന്ത്രണത്തെ തിരഞ്ഞെടുക്കും.
- എതിർ ഘടികാരദിശയിൽ തിരിക്കുന്നത് മുമ്പത്തെ നിയന്ത്രണം തിരഞ്ഞെടുക്കും. താഴെയുള്ള പുഷ് ബട്ടൺ തിരഞ്ഞെടുത്ത സവിശേഷതയിലേക്ക് പ്രവേശിക്കുന്നു.
- റോട്ടറി നോബിന്റെ വേഗത്തിലുള്ള ഭ്രമണം മൂല്യം മാറുന്നതിന്റെ നിരക്ക് വർദ്ധിപ്പിക്കും, അതായത് മൂല്യത്തിലെ വലിയ ചുവടുകൾ.
4.5.1 ടെക്സ്റ്റ് എഡിറ്റ് നിയന്ത്രണം
ഒരു ആൽഫാന്യൂമെറിക് സ്ട്രിംഗ് ഇൻപുട്ട് ചെയ്യാൻ ടെക്സ്റ്റ് എഡിറ്റർ ഉപയോഗിക്കുന്നു; താഴെയുള്ള ചിത്രം ടെക്സ്റ്റ്/നമ്പറുകൾ എഡിറ്റ് ചെയ്യുമ്പോൾ സാധാരണ ഓപ്ഷനുകൾ കാണിക്കുന്നു. നിലവിലെ കഴ്സർ സ്ഥാനത്ത് മൂല്യം മാറ്റാൻ താഴെയുള്ള റോട്ടറി നോബ് ഉപയോഗിക്കുക. 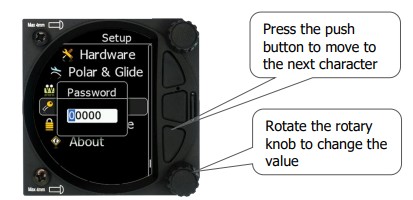
ആവശ്യമായ മൂല്യം തിരഞ്ഞെടുത്തുകഴിഞ്ഞാൽ, അടുത്ത പ്രതീക തിരഞ്ഞെടുപ്പിലേക്ക് നീങ്ങുന്നതിന് താഴെയുള്ള പുഷ് ബട്ടൺ അമർത്തുക. മുമ്പത്തെ പ്രതീകത്തിലേക്ക് തിരികെ പോകാൻ, മുകളിലുള്ള പുഷ് ബട്ടൺ അമർത്തുക. എഡിറ്റിംഗ് പൂർത്തിയാക്കുമ്പോൾ, എന്റർ കീ അമർത്തുക - താഴെയുള്ള റോട്ടറി ബട്ടൺ. എഡിറ്റ് ചെയ്ത ഫീൽഡിൽ നിന്ന് ("നിയന്ത്രണം") മധ്യ പുഷ് ബട്ടൺ ഒരു ചെറിയ അമർത്തൽ പുറത്തുകടക്കുന്നു.
4.5.2 "സ്പിൻ" നിയന്ത്രണം
"സ്പിൻ" നിയന്ത്രണങ്ങൾ സംഖ്യാ പാരാമീറ്ററുകൾക്കായി രൂപകൽപ്പന ചെയ്തിട്ടുള്ളതാണ്. തിരഞ്ഞെടുത്ത മൂല്യം കൂട്ടാനും കുറയ്ക്കാനും നോബ് തിരിക്കുക. വലിയ ഘട്ടങ്ങളിൽ മൂല്യം വർദ്ധിപ്പിക്കുന്നതിന്, താഴത്തെ റോട്ടറി നോബ് വേഗത്തിൽ കറക്കുക.  4.5.3 തിരഞ്ഞെടുക്കൽ നിയന്ത്രണം
4.5.3 തിരഞ്ഞെടുക്കൽ നിയന്ത്രണം
കോംബോ ബോക്സുകൾ എന്നും അറിയപ്പെടുന്ന സെലക്ഷൻ ബോക്സുകൾ, മുൻകൂട്ടി നിശ്ചയിച്ച മൂല്യങ്ങളുടെ പട്ടികയിൽ നിന്ന് ഒരു മൂല്യം തിരഞ്ഞെടുക്കാൻ ഉപയോഗിക്കുന്നു. ലിസ്റ്റിലൂടെ സ്ക്രോൾ ചെയ്യാൻ താഴെയുള്ള റോട്ടറി നോബ് ഉപയോഗിക്കുക. 
4.5.4 ചെക്ക്ബോക്സും ചെക്ക്ബോക്സ് ലിസ്റ്റും
ഒരു ചെക്ക്ബോക്സ് ഒരു പാരാമീറ്റർ പ്രവർത്തനക്ഷമമാക്കുകയോ പ്രവർത്തനരഹിതമാക്കുകയോ ചെയ്യുന്നു. മൂല്യം ടോഗിൾ ചെയ്യാൻ താഴെയുള്ള റോട്ടറി നോബ് അമർത്തുക.
ഒരു ഓപ്ഷൻ പ്രാപ്തമാക്കിയാൽ ഒരു ചെക്ക് മാർക്ക് പ്രദർശിപ്പിക്കപ്പെടും, അല്ലെങ്കിൽ ഒരു ശൂന്യമായ ദീർഘചതുരം പ്രദർശിപ്പിക്കപ്പെടും. 
4.5.5 സ്ലൈഡർ സെലക്ടർ
വോളിയവും തെളിച്ചവും പോലുള്ള ചില മൂല്യങ്ങൾ ഒരു സ്ലൈഡർ ഐക്കണായി പ്രദർശിപ്പിക്കും. 
താഴെയുള്ള റോട്ടറി ബട്ടൺ അമർത്തിയാൽ നിങ്ങൾക്ക് സ്ലൈഡ് നിയന്ത്രണം സജീവമാക്കാം, തുടർന്ന് നോബ് തിരിക്കുന്നതിലൂടെ നിങ്ങൾക്ക് ഇഷ്ടപ്പെട്ട മൂല്യം തിരഞ്ഞെടുത്ത് പുഷ് ബട്ടൺ വഴി അത് സ്ഥിരീകരിക്കാം.
4.6 സ്വിച്ച് ഓഫ്
പാനൽ മാസ്റ്റർ-പവർ സ്വിച്ച് വഴി SxHAWK പവർ ഓഫ് ചെയ്താൽ നിങ്ങളുടെ സെറ്റിംഗ്സ് നഷ്ടപ്പെടും.
മാസ്റ്റർ–പവർ സ്വിച്ച് വഴി സ്വിച്ച് ഓഫ് ചെയ്യുമ്പോൾ SxHAWK ശരിയായി ഷട്ട് ഡൗൺ ആകും.
നിങ്ങളുടെ ക്രമീകരണങ്ങൾ ആർക്കൈവ് ചെയ്യാൻ, വോളിയം (മുകളിൽ) നോബ് ദീർഘനേരം അമർത്തി ഉപകരണം ഷട്ട്ഡൗൺ ചെയ്യണം.
![]() പവർ ഓഫ് നടപടിക്രമത്തിനിടയിൽ എല്ലാ ക്രമീകരണങ്ങളും സംരക്ഷിക്കപ്പെടും. (മുകളിലെ) നോബിൽ ദീർഘനേരം അമർത്തി യൂണിറ്റ് ഓഫ് ചെയ്യാൻ ഞങ്ങൾ ശക്തമായി ശുപാർശ ചെയ്യുന്നു.
പവർ ഓഫ് നടപടിക്രമത്തിനിടയിൽ എല്ലാ ക്രമീകരണങ്ങളും സംരക്ഷിക്കപ്പെടും. (മുകളിലെ) നോബിൽ ദീർഘനേരം അമർത്തി യൂണിറ്റ് ഓഫ് ചെയ്യാൻ ഞങ്ങൾ ശക്തമായി ശുപാർശ ചെയ്യുന്നു.
ഓപ്പറേറ്റിംഗ് മോഡുകൾ
LXNAV SxHAWK-യ്ക്ക് അഞ്ച് ഓപ്പറേറ്റിംഗ് മോഡുകൾ ഉണ്ട്. മധ്യ (മെനു) പുഷ് ബട്ടൺ വൃത്താകൃതിയിൽ 5 ഡിസ്പ്ലേ മോഡുകളിലൂടെ ടോഗിൾ ചെയ്യുന്നു. താഴെയുള്ള ഡയഗ്രം LXNAV SxHAWK-യുടെ മോഡ് ഘടന കാണിക്കുന്നു. മുകളിലും താഴെയുമുള്ള ബട്ടണുകൾ ഉപയോഗിച്ച്, ഉപപേജുകൾക്കിടയിൽ നീങ്ങാനും സാധിക്കും.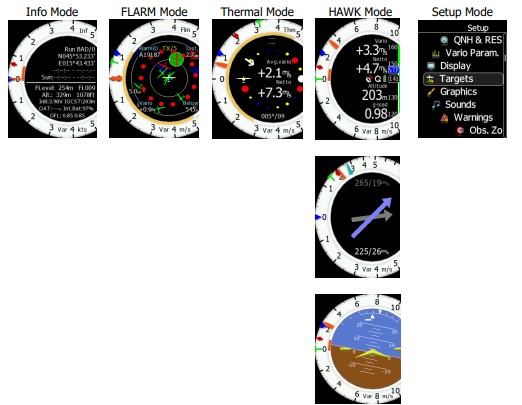
- വിവര മോഡ്: GPS ഡാറ്റ, ഉയരം, ബാറ്ററി, സൂര്യാസ്തമയ സമയം, OAT എന്നിവ അടങ്ങിയിരിക്കുന്നു.
- FLARM മോഡ്: FLARM ടാർഗെറ്റുകൾ പരിധിയിൽ കാണിക്കുന്നു (ഒരു FLARM ഉപകരണം GPS പോർട്ടുമായി ബന്ധിപ്പിച്ചിട്ടുണ്ടെങ്കിൽ).
- തെർമൽ മോഡ്: വട്ടമിടുമ്പോൾ ഒരു തെർമൽ അസിസ്റ്റന്റ് കാണിക്കുന്നു.
- HAWK മോഡ്: നാവിഗേഷൻ ബോക്സുകൾ, വിൻഡ്, AHRS ഉപ പേജുകൾ ഉള്ള ലളിതമായ സ്ക്രീൻ
5.1 ദ്രുത പ്രവേശന മെനുകൾ
ഓരോ മോഡിനും ഒരു ക്വിക്ക് ആക്സസ് മെനു ലഭ്യമാണ്, അത് മോഡ് മുതൽ മോഡ് വരെ വ്യത്യാസപ്പെടുന്നു. ക്വിക്ക് ആക്സസ് മെനുകളിൽ ലഭ്യമായ ഇനങ്ങൾ ഇവയാണ്:
- MC/BAL
- ജി പുനഃസജ്ജമാക്കുക
- ലേഔട്ട്
- ലക്ഷ്യം എഡിറ്റ് ചെയ്യുക (FLARM പേജ് മാത്രം)
- FLARM ട്രാഫിക് (FLARM പേജ് മാത്രം)
- സംഭവം
- രാത്രി
- കാറ്റ്

McCready മൂല്യം മാറ്റാൻ, താഴെയുള്ള റോട്ടറി നോബ് അമർത്തി MC/BAL അമർത്തുക. താഴത്തെ റോട്ടറി നോബിന്റെ ഒരു ചെറിയ പ്രസ്സ് മക്ക്രീഡിയിൽ നിന്ന് ബാലസ്റ്റ് ബോക്സിലേക്ക് നീങ്ങുന്നു, താഴത്തെ റോട്ടറി നോബ് വീണ്ടും അമർത്തുന്നത് ബഗ്സ് ബോക്സ് തുറക്കും. 3 സെക്കൻഡിനുള്ളിൽ ഒരു പ്രവർത്തനവും നടന്നില്ലെങ്കിൽ, ബോക്സ് അടയ്ക്കും, അല്ലെങ്കിൽ നിങ്ങൾക്ക് എപ്പോൾ വേണമെങ്കിലും CLOSE അമർത്താം (താഴ്ന്ന പുഷ് ബട്ടൺ).
5.1.1 ജി പുനഃസജ്ജമാക്കുക
വേരിയോ സ്കെയിലിൽ മഞ്ഞ ബാറായി കോൺഫിഗർ ചെയ്താൽ “ജി” മീറ്റർ വീണ്ടും സജ്ജീകരിക്കുന്നതിനുള്ള ഒരു രീതിയാണ് “റീസെറ്റ് ജി”.
5.1.2 ലേ .ട്ട്
നാവ്ബോക്സുകളുടെ സൈഡ്ബാർ, നമ്പർ, സ്ഥാനം എന്നിവ ഈ മെനുവിൽ നിർവചിക്കാനാകും. താഴത്തെ റോട്ടറി നോബ് തിരിക്കുന്നതിലൂടെ സ്ഥാനം (ലംബമോ തിരശ്ചീനമോ) സജ്ജീകരിച്ചിരിക്കുന്നു. സ്ഥിരീകരിച്ചതിന് ശേഷം നിങ്ങൾക്ക് നാവ്ബോക്സുകളുടെ എണ്ണം സജ്ജീകരിക്കാനും ഏത് നാവ്ബോക്സാണ് നിങ്ങൾ ആഗ്രഹിക്കുന്നതെന്ന് നിർവചിക്കാനും കഴിയും. സംഖ്യാ അല്ലെങ്കിൽ ഗ്രാഫിക്കൽ പേജിന് ലേഔട്ട് ക്രമീകരണം വ്യത്യസ്തമാണ്.
5.1.2.1 സംഖ്യാ പേജിലെ ലേഔട്ട്
സംഖ്യാ പേജിൽ നാവ്ബോക്സുകളുടെയും സൈഡ്ബാറിന്റെയും എണ്ണം സജ്ജമാക്കാൻ കഴിയും. എല്ലാ നാവിബോക്സും പ്രത്യേകം നിർവചിക്കാം. 
5.1.2.1.1 നവബോക്സുകൾ എഡിറ്റുചെയ്യുന്നു
ഹൈലൈറ്റ് ചെയ്ത നാവ്ബോക്സിന് ആവശ്യമായ ഡാറ്റ നിങ്ങൾക്ക് തിരഞ്ഞെടുക്കാം. താഴെയുള്ള റോട്ടറി നോബിൽ ഒരു ചെറിയ അമർത്തൽ ആവശ്യമുള്ള ക്രമീകരണം തിരഞ്ഞെടുത്ത് നിങ്ങളെ നാവ്ബോക്സ് തിരഞ്ഞെടുപ്പിലേക്ക് തിരികെ കൊണ്ടുവരും.
എപ്പോൾ വേണമെങ്കിലും EXIT (മധ്യഭാഗം) ബട്ടൺ തിരഞ്ഞെടുക്കുന്നത് ക്രമീകരണം സംരക്ഷിക്കുകയും പ്രധാന മോഡിലേക്ക് നീങ്ങുകയും ചെയ്യും.  ലഭ്യമായ നാവിബോക്സുകളുടെ പട്ടിക:
ലഭ്യമായ നാവിബോക്സുകളുടെ പട്ടിക:
| ടൈപ്പ് ചെയ്യുക | നാവ്ബോക്സ് ശീർഷകം | വിവരണം |
| ഉയരം (മീ) | Alt | മീറ്ററിൽ ഉയരം |
| ഉയരം (അടി) | Alt | അടിയിൽ ഉയരം |
| ഫ്ലൈറ്റ് ലെവൽ | FL | ഫ്ലൈറ്റ് ലെവൽ |
| മുകളിൽ tkoff. | ഹാർട്ട്വാട്ടർ | ടേക്ക് ഓഫിന് മുകളിലുള്ള ലംബ ദൂരമാണ് ഉയരം. |
| ആകെ ഉയരം | ആൾട്ടർനേറ്റീവ് ടി | ഗതികോർജ്ജത്തെയും പരിഗണിക്കുന്ന ഉയരം |
| സ്റ്റാൻഡേർഡ് ഉയരം | ആൾട്ട്സ് | 1013.24hPa-ന് മുകളിലുള്ള ഉയരം |
| ഉയരം നേടി | ആൾട്ട്ജി | കഴിഞ്ഞ താപകാലത്ത് വർദ്ധിച്ച ഉയരം |
| നിലവിലെ വേരിയേഷൻ | വര് | നിലവിലെ ലംബ വേഗത |
| നെറ്റോ വേരിയോ | നെറ്റ് | വായു പിണ്ഡത്തിന്റെ ലംബ വേഗത |
| വേരിയോ ശരാശരി | വാർ എ | ശരാശരി വേരിയൊ (ശരാശരി വേരിയൊ സമയം സജ്ജമാക്കാൻ കഴിയും) |
| ശരാശരി ശരാശരി | നെറ്റ് എ | വായു പിണ്ഡത്തിന്റെ ശരാശരി ലംബ ചലനം |
| ശരാശരി താപം. | ത്രം | വൃത്താകൃതിയുടെ തുടക്കം മുതലുള്ള ശരാശരി വേരിയേഷൻ (പച്ച ടി) |
| ഹോക്ക് ശരാശരി.നെറ്റ് | എച്ച്നെറ്റ | HAWK നെറ്റ്ടോ ആവറേജ് |
| HAWK ശരാശരി var | ഹ്വരഎ | HAWK വേരിയൊ ശരാശരി |
| ഹോക്ക് സൈഡ്സ്ലിപ്പ് | എച്ച്സ്ലിപ്പ് | HAWK സൈഡ്സ്ലിപ്പ് ആംഗിൾ |
| ഹോക്ക് എഒഎ | ഹ.എ.ഒ.എ. | HAWK ആക്രമണ ആംഗിൾ |
| യഥാർത്ഥ വായുവേഗത | ടിഎഎസ് | യഥാർത്ഥ വായുവേഗത |
| സൂചിപ്പിച്ച വായുവേഗത | ഐ.എ.എസ് | സൂചിപ്പിച്ച വായുവേഗത |
| ഗ്രൗണ്ട് വേഗത | GS | GPS-ൽ നിന്ന് എടുത്ത, നിലത്തിന് മുകളിലുള്ള വേഗത. |
| പറക്കാനുള്ള വേഗത. | എസ്.ടി.എഫ് | എംസി സെറ്റിംഗ് (മാക് സ്പീഡ്) അനുസരിച്ച് പറക്കാനുള്ള വേഗത കണക്കാക്കുന്നു. |
| ഗ്രൗണ്ട് ട്രാക്ക് | Trk | GPS-ൽ നിന്ന് എടുത്ത നിലത്തിന് മുകളിലൂടെയുള്ള ട്രാക്ക്. |
| നിലവിലെ ഗ്ലൈഡ് അനുപാതം | E | കഴിഞ്ഞ മൂന്ന് മിനിറ്റിലെ ഗ്ലൈഡർ കറന്റ് ഗ്ലൈഡ് അനുപാതം |
| തിയോർ.ഗ്ലൈഡ് അനുപാതം | ദിഇ | കാറ്റുൾപ്പെടെയുള്ള തെററ്റിക്കൽ ഗ്ലൈഡ് അനുപാതം കണക്കിലെടുക്കുന്നു |
| ഗ്ലൈഡിംഗ് കാര്യക്ഷമത | ഗ്ലെ | നിലവിലെ E യും സൈദ്ധാന്തിക E യും തമ്മിലുള്ള അനുപാതം |
| പ്രാദേശിക സമയം | സമയം | പ്രാദേശിക സമയം |
| ഫ്ലൈറ്റ് സമയം | ഫ്ലിറ്റ് ടി | വായുവിലൂടെയുള്ള സമയം |
| ജി-ലോഡ് | g | ജി ലോഡ് - കറന്റ് |
| ജി-ലോഡ് min.flight | ജിമിൻ | പറക്കുമ്പോൾ ഏറ്റവും കുറഞ്ഞ ജി-ലോഡ് |
| ജി-ലോഡ് max.flight | ജിമാക്സ് | പറക്കുമ്പോൾ പരമാവധി ജി-ലോഡ് |
| മക്ക്രീഡി എൽ/ഡി | ഇഎംസി | തിരഞ്ഞെടുത്ത മക്രീഡി മൂല്യത്തിൽ കണക്കാക്കിയ ഗ്ലൈഡ് അനുപാതം |
| മക്രെഡി | Mc | മക്രീഡി സജ്ജീകരണം |
| സജീവ ആവൃത്തി. | COM | സജീവ ആവൃത്തി |
| സ്റ്റാൻഡ്ബൈ ഫ്രീക്വൻസി. | എസ്.ടി.ബി.വൈ | സ്റ്റാൻഡ്ബൈ ഫ്രീക്വൻസി |
| XPDR ട്രാൻസ്പ്. | എക്സ്പിഡിആർ | ട്രാൻസ്പോണ്ടർ ആവൃത്തി |
| പുറത്തെ താപനില. | OAT | OAT – പുറത്തെ വായുവിന്റെ താപനില |
| ബാറ്ററി വോളിയംtage | ബാറ്ററി | ബാറ്ററി വോളിയംtage |
| ശരാശരി കാറ്റ് | കാറ്റ് | കാറ്റിന്റെ ദിശയും വേഗതയും |
| കാറ്റ് കമ്പ്. | cWnd | കാറ്റിന്റെ ഘടകം (ആദ്യ സംഖ്യ GS-TAS ൽ നിന്ന് കണക്കാക്കിയ ഘടകമാണ് / രണ്ടാമത്തെ സംഖ്യ ഒരു കാറ്റിന്റെ വെക്റ്ററിൽ നിന്നുള്ള ഘടകമാണ്) |
| ഫ്ലാപ്പ് കറന്റ് | നിലവിലെ ഫ്ലാപ്പ് സ്ഥാനം | |
| ഫ്ലാപ്പ് അഭ്യർത്ഥിച്ചു | അഭ്യർത്ഥിച്ച ഫ്ലാപ്പ് സ്ഥാനം |
![]() ഗ്രൗണ്ടിൽ എസ്സി മോഡിൽ നാവ്ബോക്സുകൾ കോൺഫിഗർ ചെയ്യുന്നതിന് നിങ്ങൾ ആദ്യം ഓട്ടോ എസ്സി ഓഫ് ചെയ്യുകയും നാവ്ബോക്സുകൾ കോൺഫിഗർ ചെയ്യുകയും തുടർന്ന് ഓട്ടോ എസ്സി നിങ്ങളുടെ ഇഷ്ടപ്പെട്ട ക്രമീകരണത്തിലേക്ക് തിരികെ സജ്ജീകരിക്കുകയും വേണം.
ഗ്രൗണ്ടിൽ എസ്സി മോഡിൽ നാവ്ബോക്സുകൾ കോൺഫിഗർ ചെയ്യുന്നതിന് നിങ്ങൾ ആദ്യം ഓട്ടോ എസ്സി ഓഫ് ചെയ്യുകയും നാവ്ബോക്സുകൾ കോൺഫിഗർ ചെയ്യുകയും തുടർന്ന് ഓട്ടോ എസ്സി നിങ്ങളുടെ ഇഷ്ടപ്പെട്ട ക്രമീകരണത്തിലേക്ക് തിരികെ സജ്ജീകരിക്കുകയും വേണം.
SC-യിൽ നിന്ന് VARIO മോഡിലേക്ക് മാറുമ്പോൾ യൂണിറ്റ് സ്വയമേവ SC-യിൽ നിന്ന് VARIO-യിലേക്ക് നാവ്ബോക്സുകൾ മാറും അല്ലെങ്കിൽ തിരിച്ചും.
5.1.2.1.2 സൈഡ്ബാർ
പേജിൽ പ്രദർശിപ്പിക്കാൻ കഴിയുന്ന വ്യത്യസ്ത സൈഡ്ബാർ ഓപ്ഷനുകൾ (ക്ലാസിക് സ്പീഡ് ടു ഫ്ലൈ-പുഷ്/പുൾ ബാർ, ഫ്ലാപ്സ് ടേപ്പ്, സ്പീഡ് ടേപ്പ്, സംയോജിത സ്പീഡ് & ഫ്ലാപ്പ് ടേപ്പ്) എന്നിവയിൽ നിന്ന് ഉപയോക്താവിന് തിരഞ്ഞെടുക്കാം.
സ്പീഡ് ടു ഫ്ലൈ ബാർ ഡൈനാമിക് ആണ്. 
5.1.3 ടാർഗെറ്റ് എഡിറ്റ് ചെയ്യുക
ഉപയോക്താവിന് FLARM ടാർഗെറ്റ് വിശദാംശങ്ങൾ എഡിറ്റുചെയ്യാനാകും.
5.1.4 ഫ്ലാർം ട്രാഫിക്
ഈ മോഡ് അവരുടെ FLARM ID കോഡുകൾ ഉപയോഗിച്ച് ഗ്ലൈഡറിന് ചുറ്റും ലഭ്യമായ എല്ലാ FLARM ട്രാഫിക്കും കാണിക്കുന്നു; ഉപയോക്താവിന് എല്ലാ FLARM ഒബ്ജക്റ്റ് ഡാറ്റയും എഡിറ്റ് ചെയ്യാൻ കഴിയും.
5.1.5 ഇവന്റ്
ഒരു ഇവന്റ് ലോഗ് ചെയ്യാൻ ഇവന്റ് ഉപയോഗിക്കുന്നു. റെക്കോർഡിംഗ് നിരക്ക് ഒരു മിനിറ്റിന് 1 സെക്കൻഡായി വർദ്ധിപ്പിക്കും.
"ഇവന്റ് അടയാളപ്പെടുത്തി" എന്ന സന്ദേശം സ്ക്രീനിൽ പ്രദർശിപ്പിക്കും. ![]()
അതേ നിമിഷം തന്നെ കണക്റ്റുചെയ്ത ഫ്ലാർമിലേക്കോ നാനോ ഉപകരണത്തിലേക്കോ PEV സന്ദേശം അയയ്ക്കും.
5.1.6 രാത്രി
രാത്രി തിരഞ്ഞെടുക്കുന്നത് യൂണിറ്റിന്റെ തെളിച്ചം ഏറ്റവും കുറഞ്ഞതിലേക്ക് കുറയ്ക്കാൻ ഇടയാക്കും. "രാത്രി"യിൽ വീണ്ടും അമർത്തുന്നത് ക്രമീകരണങ്ങൾക്ക് കീഴിൽ നിർവചിച്ചിരിക്കുന്ന മൂല്യത്തിലേക്ക് തെളിച്ചം പുനഃസജ്ജമാക്കും.
5.1.7 കാറ്റ്
ഇവിടെ നിങ്ങൾക്ക് ഉപകരണം ഉപയോഗിച്ച് ഓട്ടോമാറ്റിക് കാറ്റ് കണക്കുകൂട്ടലുകൾക്കിടയിൽ മാറാം അല്ലെങ്കിൽ കാറ്റ് പാരാമീറ്ററുകൾ സ്വയം സജ്ജമാക്കാം. കാറ്റ് കണക്കുകൂട്ടൽ പ്രവർത്തനരഹിതമാക്കുമ്പോൾ, നിങ്ങൾക്ക് കാറ്റിന്റെ വേഗതയും ദിശയും സ്വമേധയാ സജ്ജമാക്കാൻ കഴിയും. 
5.2 വിവര മോഡ്
ഫ്ലൈറ്റ് ലെവൽ, ഉയരം, ബാറ്ററി നില, FLARM സ്റ്റാറ്റസ് എന്നിവയ്ക്കൊപ്പം GPS സ്ഥാനം, തീയതി, സമയം എന്നിവയുടെ ഒരു സ്നാപ്പ്ഷോട്ട് ഇൻഫോ മോഡ് നിങ്ങൾക്ക് നൽകുന്നു. ആൾട്ടിറ്റ്യൂഡ് നാവ്ബോക്സ് പോലെ ഫ്ലൈറ്റ് ലെവലിന് തുല്യമായത് മീറ്ററിലോ അടിയിലോ ലഭ്യമാണ്. 
വിവരണം:
- ലോഗർ സ്റ്റാറ്റസ് നിർത്തുക അല്ലെങ്കിൽ പ്രവർത്തിപ്പിക്കുക എന്ന് പ്രദർശിപ്പിക്കും.
- ഉപഗ്രഹങ്ങളുടെ എണ്ണത്തോടൊപ്പം GPS സ്റ്റാറ്റസ് OK, BAD, NODATA എന്നിങ്ങനെ പ്രദർശിപ്പിക്കും.
- അക്ഷാംശവും രേഖാംശവും
- പ്രാദേശിക സമയവും തീയതിയും
- സൂര്യോദയത്തിന്റെയും സൂര്യാസ്തമയത്തിന്റെയും സമയം.
- ഫ്ലൈറ്റ് ലെവലും മീറ്ററിൽ
- മീറ്ററിലും അടിയിലും ഉയരം
- ബാറ്ററി നില
- IGCAlt – IGC ഉയരം (IGC സെൻസറിൽ നിന്ന് വായിക്കുന്ന ഉയരം)
- FLARM സ്റ്റാറ്റസ് (TX – ഡാറ്റ ട്രാൻസ്മിറ്റ് ചെയ്യുന്നു / കൂടാതെ സ്വീകരിച്ച നിരവധി FLARM ഉപകരണങ്ങളും)
- OAT - പുറത്തെ വായുവിന്റെ താപനില
- GFL – G-ഫോഴ്സ് ലെവലുകൾ. രേഖപ്പെടുത്തിയ ഏറ്റവും കുറഞ്ഞതും കൂടിയതുമായ G-ഫോഴ്സ് ലെവൽ
5.2.1 ദ്രുത പ്രവേശന മെനു
(താഴ്ന്ന) റോട്ടറി ബട്ടണിന്റെ ഒരു ചെറിയ അമർത്തൽ ക്വിക്ക് ആക്സസ് മെനു സജീവമാക്കുന്നു.
5.3 ഫ്ലാർം മോഡ്
FLARM പോർട്ട് വഴി ഒരു FLARM ഉറവിടവുമായി SxHAWK ബന്ധിപ്പിച്ചിട്ടുണ്ടെങ്കിൽ, FLARM മോഡ് പരിധിക്കുള്ളിലുള്ള FLARM ടാർഗെറ്റുകളുടെ ആപേക്ഷിക സ്ഥാനങ്ങളുടെ ഒരു മാപ്പ് പ്രദർശിപ്പിക്കും. താഴെയുള്ള റോട്ടറി നോബ് തിരിക്കുന്നതിലൂടെ നിങ്ങൾക്ക് ഡിസ്പ്ലേയുടെ പരിധി 0.5 കിലോമീറ്ററിൽ നിന്ന് 150 കിലോമീറ്ററായി മാറ്റാൻ കഴിയും. മുകളിലേക്ക്/താഴേക്ക് ബട്ടൺ വഴി FLARM ടാർഗെറ്റുകൾക്കിടയിൽ മാറുന്നത് സാധ്യമാണ്. തിരഞ്ഞെടുത്ത FLARM ഒബ്ജക്റ്റിൽ നിന്നുള്ള ഡാറ്റ 4 കോണുകളിൽ കാണാൻ കഴിയും: FLARM ഐഡി, ദൂരം, വേരിയോ, ആപേക്ഷിക ഉയരം (മുകളിൽ / താഴെ). എത്ര FLARM ഒബ്ജക്റ്റുകൾ നിലവിലുണ്ടെന്നതിന്റെ സൂചനയും ഇനിപ്പറയുന്ന രീതിയിൽ പ്രദർശിപ്പിച്ചിരിക്കുന്നു:
TX/നമ്പർ.
![]() ഈ മോഡ് സജ്ജീകരണം>ഗ്രാഫിക്സ്>മോഡുകൾ>FLARM മോഡ് വഴി പ്രവർത്തനരഹിതമാക്കാം.
ഈ മോഡ് സജ്ജീകരണം>ഗ്രാഫിക്സ്>മോഡുകൾ>FLARM മോഡ് വഴി പ്രവർത്തനരഹിതമാക്കാം.
![]() ദൂരം, ആപേക്ഷിക ഉയരം, വേരിയൊ സൂചനകൾ എന്നിവ തിരഞ്ഞെടുത്ത ലക്ഷ്യവുമായി ബന്ധപ്പെട്ടിരിക്കുന്നു.
ദൂരം, ആപേക്ഷിക ഉയരം, വേരിയൊ സൂചനകൾ എന്നിവ തിരഞ്ഞെടുത്ത ലക്ഷ്യവുമായി ബന്ധപ്പെട്ടിരിക്കുന്നു.
5.3.1 ദ്രുത പ്രവേശന മെനു
താഴത്തെ റോട്ടറി ബട്ടണിന്റെ ഒരു ചെറിയ പ്രസ്സ് ക്വിക്ക് ആക്സസ് മെനു സജീവമാക്കുന്നു.
5.3.1.1 ടാർഗെറ്റ് എഡിറ്റ് ചെയ്യുക
ഉപയോക്താവിന് ഇനിപ്പറയുന്ന FLARM ഒബ്ജക്റ്റ് ഡാറ്റ എഡിറ്റ് ചെയ്യാൻ കഴിയും:
- ഫ്ലാം ഐഡി
- മത്സര ചിഹ്നം
- പൈലറ്റ്
- വിമാന തരം
- രജിസ്ട്രേഷൻ
- വിമാനത്താവളം
- ആശയവിനിമയ ആവൃത്തി (വസ്തുവിന്റെ ആശയവിനിമയ ആവൃത്തി)
താഴെയുള്ള റോട്ടറി ബട്ടൺ അമർത്തി, എഡിറ്റ് ടാർഗെറ്റ് തിരഞ്ഞെടുത്ത് താൽപ്പര്യമുള്ള ഡാറ്റ പരിഷ്ക്കരിച്ചുകൊണ്ട് ഈ ക്രമീകരണങ്ങൾ ആക്സസ് ചെയ്യാൻ കഴിയും.
5.3.1.2 ഫ്ലാർം ട്രാഫിക്
ശ്രേണിയിലുള്ള എല്ലാ FLARM ഒബ്ജക്റ്റുകളും ഈ മോഡിൽ പ്രദർശിപ്പിക്കും. ഇനിപ്പറയുന്ന വിശദാംശങ്ങൾ കാണിച്ചിരിക്കുന്നു:
- FLARM ടാർഗെറ്റ് ഐഡി
- ആപേക്ഷിക ദൂരം
- ലംബ വേഗത (വസ്തുവിൽ നിന്നുള്ള വേരിയൊ ഡാറ്റ)
- ആപേക്ഷിക ഉയരം
നിങ്ങൾ തിരഞ്ഞെടുത്ത FLARM ടാർഗെറ്റിൽ അമർത്തുകയാണെങ്കിൽ, ടാർഗെറ്റിന്റെ ഡാറ്റ ചേർക്കാൻ കഴിയുന്ന എഡിറ്റ് ടാർഗെറ്റ് മെനുവിൽ നിങ്ങൾക്ക് നൽകാം.
5.3.2 ഫ്ലാർം മുന്നറിയിപ്പുകൾ
നിങ്ങൾ ഏത് മോഡിൽ ആയിരുന്നാലും, ഒരു FLARM ടാർഗെറ്റ് അടിയന്തിര (മൂന്നാം മുന്നറിയിപ്പ് ലെവൽ) അല്ലെങ്കിൽ പ്രധാനപ്പെട്ട (രണ്ടാം മുന്നറിയിപ്പ് ലെവൽ) മുന്നറിയിപ്പ് ട്രിഗർ ചെയ്യുകയാണെങ്കിൽ, സ്ക്രീൻ സ്വയമേവ FLARM മുന്നറിയിപ്പ് മോഡിലേക്ക് മാറും.
FLARM ഓപ്പറേറ്റിംഗ് മാനുവലിൽ നിന്ന് വേർതിരിച്ചെടുക്കുക:
അപകടസാധ്യതയുള്ള കൂട്ടിയിടിക്ക് മുമ്പ് ശേഷിക്കുന്ന സമയത്തിന്റെ ക്രമത്തിലാണ് മുന്നറിയിപ്പുകൾ നൽകിയിരിക്കുന്നത്, ജ്യാമിതീയ ദൂരമല്ല. മറ്റൊരു വിമാനത്തിനോ ഒരു തടസ്സത്തിനോ വേണ്ടിയുള്ള ആദ്യ മുന്നറിയിപ്പ് ലെവൽ സാധ്യമായ കൂട്ടിയിടിക്ക് 19 - 25 സെക്കൻഡിൽ താഴെയാണ് നൽകുന്നത്; രണ്ടാമത്തെ മുന്നറിയിപ്പ് ലെവൽ 14 - 18 സെക്കൻഡിൽ താഴെയാണ് നൽകുന്നത്; 6-8 സെക്കൻഡിൽ താഴെയുള്ള മൂന്നാമത്തെ ലെവൽ. 
കൂട്ടിയിടി ഭീഷണി FLARM കണക്കാക്കുന്നത് വരെ മുന്നറിയിപ്പുകൾ തുടരും. പ്രവചനത്തെ ആശ്രയിച്ച് മുന്നറിയിപ്പ് നില കുറയുകയോ റദ്ദാക്കുകയോ ചെയ്യാം. മുന്നറിയിപ്പുകൾ തിരഞ്ഞെടുത്തവയാണ്; സമീപഭാവിയിൽ കൂട്ടിയിടിക്കുന്നതിനുള്ള ഉയർന്ന സാധ്യത കണക്കുകൂട്ടൽ വെളിപ്പെടുത്തിയാൽ മാത്രമേ അവ നൽകൂ.
5.4 തെർമൽ അസിസ്റ്റന്റ് മോഡ്

തെർമൽ അസിസ്റ്റന്റ് മോഡ് തെർമലിനുള്ളിലെ നിങ്ങളുടെ സ്ഥാനത്തിന്റെ ഒരു ഗ്രാഫിക്കൽ പ്രാതിനിധ്യം പ്രദർശിപ്പിക്കുന്നു. നിങ്ങൾ ഇടതുവശത്തേക്ക് തെർമൽ ചെയ്യുകയാണെങ്കിൽ, കുമിളകളുടെ വളയത്തിന്റെ വലതുവശത്ത് ഒരു വിമാന ചിഹ്നം ഉണ്ടാകും, കുമിളകൾ ഘടികാരദിശയിൽ കറങ്ങുന്നതായി കാണപ്പെടും (ഗ്ലൈഡറിന്റെ ചിഹ്നത്തിലേക്ക്). നിങ്ങൾ വലതുവശത്തുള്ള തെർമലിലാണെങ്കിൽ ഇടതുവശത്ത് ഒരു വിമാന ചിഹ്നം ഉണ്ടാകും, കുമിളകളുടെ വളയം എതിർ ഘടികാരദിശയിൽ കറങ്ങുന്നതായി കാണപ്പെടും (ഗ്ലൈഡറിന്റെ ചിഹ്നത്തിലേക്ക്). വലിയ ചുവന്ന കുമിളകൾ തെർമലിനുള്ളിലെ ഏറ്റവും ശക്തമായ ലിഫ്റ്റിനെയും ചെറിയ നീല ഡോട്ടുകൾ തെർമലിനുള്ളിലെ ഏറ്റവും ദുർബലമായ ലിഫ്റ്റിനെയും സിങ്കിനെയും സൂചിപ്പിക്കുന്നു. മഞ്ഞ കുമിളകൾ നിങ്ങളുടെ മാക്ക്രേഡി ക്രമീകരണത്തിന് തുല്യമായ ലിഫ്റ്റിനെ സൂചിപ്പിക്കുന്നു, നിങ്ങളുടെ ഇഷ്ടപ്പെട്ട ക്രമീകരണത്തെ ആശ്രയിച്ച് ശരാശരി താപ അല്ലെങ്കിൽ ശരാശരി കയറ്റ നിരക്ക്. ഏറ്റവും ശക്തമായ ലിഫ്റ്റിന്റെ പോയിന്റ് ഒരു വെളുത്ത വലിയ കുമിളയാണ് സൂചിപ്പിക്കുന്നത്.
തെർമലിന്റെ ഏത് ഭാഗത്താണ് ഏറ്റവും ശക്തമായ ലിഫ്റ്റ് ഉള്ളതെന്ന് ദൃശ്യപരമായി നിർണ്ണയിക്കാൻ നിങ്ങൾക്ക് തെർമൽ അസിസ്റ്റന്റ് ഉപയോഗിക്കാം, കൂടാതെ ഏറ്റവും ശക്തമായ ലിഫ്റ്റിന്റെ ദിശയിലേക്കും ദുർബലമായ ലിഫ്റ്റിൽ നിന്നോ സിങ്കിൽ നിന്നോ ഗ്ലൈഡർ നിയന്ത്രിക്കുന്നതിന് അതിനനുസരിച്ച് നിങ്ങളുടെ ഊഴം ക്രമീകരിക്കാം.
തെർമൽ അസിസ്റ്റന്റ് മോഡിലേക്ക് സ്വയമേവ മാറുന്ന തരത്തിൽ തെർമലിംഗ് അസിസ്റ്റന്റിനെ സജ്ജമാക്കാം അല്ലെങ്കിൽ അത് സ്വമേധയാ തിരഞ്ഞെടുക്കാം. ക്രമീകരണങ്ങൾക്കായി അധ്യായം 5.6.7.2.1 കാണുക.
തെർമൽ അസിസ്റ്റന്റ് മോഡിനുള്ളിലെ രണ്ട് നാവ്ബോക്സുകൾ ക്വിക്ക് ആക്സസ് മെനു ഉപയോഗിച്ച് കോൺഫിഗർ ചെയ്യാൻ കഴിയും.
![]() ഈ പേജ് ഇനിപ്പറയുന്ന വഴി കോൺഫിഗർ ചെയ്യാം: സജ്ജീകരണം->ഗ്രാഫിക്സ്->മോഡുകൾ->തെർമൽ മോഡ്.
ഈ പേജ് ഇനിപ്പറയുന്ന വഴി കോൺഫിഗർ ചെയ്യാം: സജ്ജീകരണം->ഗ്രാഫിക്സ്->മോഡുകൾ->തെർമൽ മോഡ്.
![]() കോക്ക്പിറ്റിൽ നിന്ന് പുറത്തേക്ക് നോക്കൂ!
കോക്ക്പിറ്റിൽ നിന്ന് പുറത്തേക്ക് നോക്കൂ!
തെർമൽ അസിസ്റ്റന്റിനെക്കുറിച്ച് അന്വേഷിക്കുന്നത് നിങ്ങൾക്കും തെർമലിലെ മറ്റ് പൈലറ്റുമാർക്കും ജീവന് ഭീഷണിയായേക്കാം.
5.4.1 ദ്രുത പ്രവേശന മെനു
(താഴ്ന്ന) റോട്ടറി ബട്ടണിന്റെ ഒരു ചെറിയ അമർത്തൽ ക്വിക്ക് ആക്സസ് മെനു സജീവമാക്കുന്നു.
5.5 ഹോക്ക് മോഡ്
HAWK മോഡിൽ മൂന്ന് വ്യത്യസ്ത പേജുകൾ പ്രദർശിപ്പിക്കാൻ കഴിയും. ന്യൂമെറിക്കൽ സ്ക്രീൻ, വിൻഡ് സ്ക്രീൻ, AHRS സ്ക്രീൻ.
5.5.1 സംഖ്യാ പേജ്
വേപോയിന്റ് മോഡിൽ സംഖ്യാപരമായ ഡാറ്റ അടങ്ങുന്ന രണ്ടാമത്തെ പേജ് ഉണ്ട്. ഡിഫോൾട്ട് 4 നാവ്ബോക്സുകളാണ്: ശരാശരി വേരിയോ, നെറ്റോ, ആൾട്ടിറ്റ്യൂഡ്, ട്രൂ എയർസ്പീഡ്. കൂടാതെ, സെൻട്രൽ ലൈൻ FLARM, GPS, Cruise/Climb, ബാറ്ററി സ്റ്റാറ്റസ് എന്നിവ കാണിക്കുന്നു. താഴെയുള്ള പുഷ് ബട്ടൺ ഒരിക്കൽ അമർത്തിയാൽ ഈ രണ്ടാമത്തെ പേജ് തിരഞ്ഞെടുക്കാം. മുകളിലെ പുഷ് ബട്ടൺ (മൂന്നിന്റെയും മുകളിലെ ബട്ടൺ) അമർത്തി നിങ്ങൾക്ക് വേപോയിന്റ് നാവിഗേഷൻ മോഡിലേക്ക് മടങ്ങാം. 
വേരിയോ നീഡിൽ ഇവ പ്രദർശിപ്പിക്കാം: വേരിയോ, നെറ്റോ, ആപേക്ഷിക അല്ലെങ്കിൽ പറക്കാനുള്ള വേഗത മൂല്യം (സെറ്റപ്പ്>ഹാർഡ്വെയർ->ഇൻഡിക്കേറ്റർ). +/-5 +/-10 അല്ലെങ്കിൽ +/-20 ശ്രേണിയിൽ സ്കെയിൽ തിരഞ്ഞെടുക്കാം. കഴ്സർ ശൈലി നേർത്തതോ, ഇടത്തരമോ, കട്ടിയുള്ളതോ ആകാം. ഇത് ലീനിയർ അല്ലെങ്കിൽ നോൺ-ലീനിയർ ആകാം (സെറ്റപ്പ്->ഗ്രാഫിക്സ്>ഇൻഡിക്കേറ്റർ). സോഫ്റ്റ്വെയറിനുള്ളിൽ ശ്രേണി m/s, kts, km/h, mph അല്ലെങ്കിൽ fpm (സെറ്റപ്പ്, യൂണിറ്റുകൾ, ലംബ വേഗതയിൽ) ആയി സജ്ജമാക്കാം.
HAWK സൂചി, Vario സൂചിയുടെ അതേ പാരാമീറ്റർ കാണിക്കും, പക്ഷേ HAWK അൽഗോരിതം ഉപയോഗിച്ച് കണക്കാക്കും. HAWK സജ്ജീകരണത്തെക്കുറിച്ച് കൂടുതലറിയാൻ അദ്ധ്യായം 7.6.1 ഉം 7.6.2 ഉം കാണുക.
- ഒരു സ്പീഡ് ടു ഫ്ലൈ ബാർ, സ്പീഡ് ടേപ്പ് അല്ലെങ്കിൽ ഫ്ലാപ്പ് ടേപ്പ് പ്രദർശിപ്പിക്കുന്നതിന് സൈഡ്ബാർ കോൺഫിഗർ ചെയ്യാവുന്നതാണ്.
നിലവിലെ മാക്രെഡി ക്രമീകരണം, സിങ്ക് റേറ്റ്, വേഗത എന്നിവയുമായി താരതമ്യപ്പെടുത്തുമ്പോൾ നിങ്ങൾ ഏത് വേഗതയിൽ പറക്കണമെന്ന് സ്പീഡ് ടു ഫ്ലൈ ബാർ ചിഹ്നം സൂചിപ്പിക്കുന്നു. ഒരു അമ്പടയാളം എന്നാൽ 10 യൂണിറ്റ് വേഗത അല്ലെങ്കിൽ വേഗത കുറവാണ് എന്നാണ് അർത്ഥമാക്കുന്നത്.
സ്പീഡ് ടേപ്പ് സ്പീഡ് സെറ്റിംഗുകളെ ആശ്രയിച്ച് സ്പീഡ് ടേപ്പ് രൂപത്തിൽ ഇൻഡിക്കേറ്റഡ് എയർ സ്പീഡ് (IAS) പ്രതിനിധീകരിക്കുന്നു (പോളാർ & ഗ്ലൈഡർ - സ്പീഡുകൾ കാണുക). സെറ്റിംഗുകളെയും IAS-നെയും ആശ്രയിച്ച് സ്പീഡ് ടേപ്പ് പച്ച, മഞ്ഞ എന്നിവയിൽ നിന്ന് ചുവപ്പിലേക്ക് നിറം മാറും.
ഫ്ലാപ്പ് ടേപ്പിന് ശുപാർശ ചെയ്യുന്ന ഫ്ലാപ്പ് സ്ഥാനം പ്രദർശിപ്പിക്കാൻ കഴിയും. CAN ബസിൽ ഒരു ഫ്ലാപ്പ് സെൻസർ ഉണ്ടെങ്കിൽ, ഫ്ലാപ്പ് ടേപ്പ് യഥാർത്ഥ ഫ്ലാപ്പ് സ്ഥാനവും പ്രദർശിപ്പിക്കും.
സ്പീഡ്, ഫ്ലാപ്പ് ടേപ്പ് എന്നിവ രണ്ടും ചേർന്നതാണ്, സ്പീഡ്, ഫ്ലാപ്പ് ടേപ്പ്. - റെഡ് ഡയമണ്ട് ചിഹ്നത്തിന് Netto, Average Netto, Average vertical speed അല്ലെങ്കിൽ Gforce എന്നിവ കാണിക്കാനാകും.
- നീല അമ്പടയാള ചിഹ്നം നിലവിലെ MacCready മൂല്യം കാണിക്കുന്നു.
- ഗ്രീൻ ടി ചിഹ്നം അവസാനത്തെ താപ ശരാശരി മൂല്യത്തെ പ്രതിനിധീകരിക്കുന്നു.
- മഞ്ഞ ബാറിന് നിർവചിക്കപ്പെട്ട സമയം (ശരാശരി vario) അല്ലെങ്കിൽ G മീറ്ററിൽ (മുഴുവൻ ഫ്ലൈറ്റിലും) വേരിയോയുടെ പരമാവധി, കുറഞ്ഞ മൂല്യങ്ങൾ കാണിക്കാനാകും.
- FLARM സ്റ്റാറ്റസ് ചിഹ്നം ഒരു FLARM യൂണിറ്റിന്റെ (ഗ്രേ) സാന്നിധ്യത്തെ സൂചിപ്പിക്കുന്നു, മറ്റ് FLARM യൂണിറ്റുകളിൽ നിന്ന് FLARM-ന് എന്തെങ്കിലും ഡാറ്റ ലഭിക്കുകയാണെങ്കിൽ, ചിഹ്നം ചുവപ്പായി മാറുന്നു.
- GPS സ്റ്റാറ്റസ് ഐഡി ശരിയാണെങ്കിൽ GPS ചിഹ്നം പച്ച നിറമായിരിക്കും, GPS സ്റ്റാറ്റസ് മോശമാണെങ്കിൽ ചുവപ്പ് നിറമായിരിക്കും.
GPS ഡാറ്റ കണ്ടെത്തിയില്ലെങ്കിൽ, ചിഹ്നം അപ്രത്യക്ഷമാകും.
താഴത്തെ റോട്ടറി നോബിന്റെ ഒരു ചെറിയ പ്രസ്സ് ഉപയോഗിച്ച് ക്വിക്ക് ആക്സസ് മെനു ഉപയോഗിച്ച് സംഖ്യാ നാവ്ബോക്സുകൾ മാറ്റാൻ കഴിയും, തുടർന്ന് മെനുവിൽ നിന്ന് നാവ്ബോക്സ് തിരഞ്ഞെടുത്ത് ലോവർ റോട്ടറി നോബിന്റെ ഷോർട്ട് പ്രസ്സ്. മഞ്ഞ ബോർഡർ ഉപയോഗിച്ച് ഹൈലൈറ്റ് ചെയ്തിരിക്കുന്ന ആദ്യത്തെ നാവ്ബോക്സ് ഉപയോഗിച്ച്, താഴെയുള്ള റോട്ടറി നോബ് ഉപയോഗിച്ച് നിങ്ങൾക്ക് നാല് നാവ്ബോക്സുകളിലൂടെ സ്ക്രോൾ ചെയ്യാം. താഴത്തെ റോട്ടറി നോബിന്റെ ഒരു ചെറിയ പ്രസ്സ് ഉപയോഗിച്ച് നിങ്ങൾ മാറ്റാൻ ആഗ്രഹിക്കുന്ന നാവ്ബോക്സ് തിരഞ്ഞെടുക്കുക. ഇത് ലഭ്യമായ നാവ്ബോക്സുകളുടെ ഒരു ലിസ്റ്റ് തുറക്കും. 
ആവശ്യമുള്ള നാവ്ബോക്സ് തിരഞ്ഞെടുത്ത് താഴെയുള്ള റോട്ടറി നോബിന്റെ ഒരു ചെറിയ പ്രസ്സ് ഉപയോഗിച്ച് ഇത് സംരക്ഷിക്കുക. മാറ്റേണ്ട മറ്റേതെങ്കിലും നാവ്ബോക്സിനായി ഈ പ്രക്രിയ ആവർത്തിക്കുക.
5.5.2 വിൻഡ് പേജ്
ഈ പേജിൽ തത്സമയ കാറ്റ് വെക്ടറും ശരാശരി കാറ്റ് വെക്ടറും കാണിച്ചിരിക്കുന്നു. HAWK ഓപ്ഷൻ സജീവമായിരിക്കുമ്പോൾ തത്സമയ കാറ്റ് നീല നിറത്തിൽ അവതരിപ്പിക്കുന്നു, അല്ലാത്തപക്ഷം അത് വെള്ള നിറത്തിലായിരിക്കും. പശ്ചാത്തലത്തിലുള്ള ചാരനിറത്തിലുള്ള രണ്ടാമത്തെ അമ്പടയാളം ശരാശരി കാറ്റിനായി ഉപയോഗിക്കുന്നു. പരിശോധിച്ച എല്ലാ കാറ്റ് രീതികളിൽ നിന്നും ശരാശരി കാറ്റ് കണക്കാക്കുന്നു.
മൂന്നാമത്തേതായ മഞ്ഞ അമ്പടയാളം ഒരു ഓപ്ഷണലാണ്, മികച്ച ഊർജ്ജത്തിലേക്കുള്ള ദിശ കാണിക്കുന്നു. ഊർജ്ജ അമ്പടയാളം പ്രവർത്തനക്ഷമമാക്കാനോ പ്രവർത്തനരഹിതമാക്കാനോ കഴിയും.
ഗ്ലൈഡർ ഓറിയന്റേഷനുമായി ബന്ധപ്പെട്ട് കാറ്റ് അമ്പടയാളങ്ങൾ എപ്പോഴും വരയ്ക്കുന്നു. ഉദാ: അമ്പുകൾ താഴേക്ക് ചൂണ്ടുകയാണെങ്കിൽ, അത് തല കാറ്റിനെ സൂചിപ്പിക്കുന്നു. അമ്പുകൾ ഇടത്തോട്ടോ വലത്തോട്ടോ ചൂണ്ടുന്നുവെങ്കിൽ, അതിനർത്ഥം വശത്തെ കാറ്റ് എന്നാണ്. HAWK ഓപ്ഷൻ ഉപയോഗിക്കുമ്പോൾ, കാറ്റിന്റെ ഡിഫോൾട്ട് ശരാശരി സമയം 30 സെക്കൻഡായി സജ്ജീകരിച്ചിരിക്കുന്നു. ഉപയോക്താവിന് ഇത് Vario പാരാമീറ്ററുകളിൽ പരിഷ്കരിക്കാനാകും. HAWK ഓപ്ഷൻ ഉപയോഗിക്കുന്നില്ലെങ്കിൽ, ശരാശരി സമയം മൂന്ന് മിനിറ്റായി നിശ്ചയിച്ചിരിക്കുന്നു. HAWK നെ കുറിച്ച് കൂടുതലറിയാൻ അധ്യായം 7 കാണുക.
HAWK ഓപ്ഷൻ ഉപയോഗിക്കുമ്പോൾ, കാറ്റിന്റെ ഡിഫോൾട്ട് ശരാശരി സമയം 30 സെക്കൻഡായി സജ്ജീകരിച്ചിരിക്കുന്നു. ഉപയോക്താവിന് ഇത് Vario പാരാമീറ്ററുകളിൽ പരിഷ്കരിക്കാനാകും. HAWK ഓപ്ഷൻ ഉപയോഗിക്കുന്നില്ലെങ്കിൽ, ശരാശരി സമയം മൂന്ന് മിനിറ്റായി നിശ്ചയിച്ചിരിക്കുന്നു. HAWK നെ കുറിച്ച് കൂടുതലറിയാൻ അധ്യായം 7 കാണുക.
5.5.3 AHRS പേജ്
വേപോയിന്റ് മോഡിൽ AHRS പ്രദർശിപ്പിക്കുന്ന നാലാമത്തെ പേജ് ഉണ്ട്. 
![]() താഴ്ന്ന റോട്ടറി നോബ് വഴി പിച്ച് ഓഫ്സെറ്റ് ക്രമീകരിക്കാൻ കഴിയും.
താഴ്ന്ന റോട്ടറി നോബ് വഴി പിച്ച് ഓഫ്സെറ്റ് ക്രമീകരിക്കാൻ കഴിയും.
![]() മത്സരങ്ങൾക്കായി, സെറ്റപ്പ്> ഹാർഡ്വെയർ> അഹർസ് മെനു വഴി കൃത്രിമ ചക്രവാളം പ്രവർത്തനരഹിതമാക്കാം. കൂടുതൽ വിവരങ്ങൾക്ക് (5.6.11.6) അധ്യായം കാണുക. കൃത്രിമ ചക്രവാള പേജ് സജീവമാകുമ്പോൾ, സ്ഥിരീകരണ ആവശ്യങ്ങൾക്കായി ഒരു BFION ഇവന്റ് റെക്കോർഡ് ചെയ്ത ഫ്ലൈറ്റിലേക്ക് എഴുതപ്പെടും.
മത്സരങ്ങൾക്കായി, സെറ്റപ്പ്> ഹാർഡ്വെയർ> അഹർസ് മെനു വഴി കൃത്രിമ ചക്രവാളം പ്രവർത്തനരഹിതമാക്കാം. കൂടുതൽ വിവരങ്ങൾക്ക് (5.6.11.6) അധ്യായം കാണുക. കൃത്രിമ ചക്രവാള പേജ് സജീവമാകുമ്പോൾ, സ്ഥിരീകരണ ആവശ്യങ്ങൾക്കായി ഒരു BFION ഇവന്റ് റെക്കോർഡ് ചെയ്ത ഫ്ലൈറ്റിലേക്ക് എഴുതപ്പെടും.
5.5.4 ദ്രുത പ്രവേശന മെനു
(താഴ്ന്ന) റോട്ടറി ബട്ടണിന്റെ ഒരു ചെറിയ അമർത്തൽ ക്വിക്ക് ആക്സസ് മെനു സജീവമാക്കുന്നു.
5.6 സെറ്റപ്പ് മോഡ്
SxHAWK വേരിയൊയുടെ കോൺഫിഗറേഷനും അടിസ്ഥാന ക്രമീകരണങ്ങളും മാറ്റാൻ സജ്ജീകരണ മോഡ് നിങ്ങളെ അനുവദിക്കുന്നു. 
സജ്ജീകരണ മെനുവിൽ ഇനിപ്പറയുന്ന ഇനങ്ങൾ പട്ടികപ്പെടുത്തിയിരിക്കുന്നു:
- ക്യുഎൻഎച്ച് &ആർഇഎസ്
- ഫ്ലൈറ്റ് റെക്കോർഡർ
- വേരിയോ പാരാമീറ്ററുകൾ
- പ്രദർശിപ്പിക്കുക
- Files
- ലോഗ്ബുക്ക്
- ഗ്രാഫിക്സ്
- ശബ്ദങ്ങൾ
- നിരീക്ഷണ മേഖലകൾ
- മുന്നറിയിപ്പുകൾ
- യൂണിറ്റുകൾ
- ഹാർഡ്വെയർ
- പോളാർ & ഗ്ലൈഡർ
- രഹസ്യവാക്ക്
- കുറിച്ച്
താഴത്തെ റോട്ടറി നോബ് തിരിക്കുന്നതിലൂടെയും താഴത്തെ റോട്ടറി നോബിൽ ഒരു ചെറിയ പ്രസ്സ് ഉപയോഗിച്ച് മാറ്റാൻ ഒരു ക്രമീകരണം തിരഞ്ഞെടുത്തുകൊണ്ട് നിങ്ങൾക്ക് ക്രമീകരണങ്ങളുടെ പട്ടിക മുകളിലേക്കും താഴേക്കും സ്ക്രോൾ ചെയ്യാം.
![]() എല്ലാ മെനുകൾക്കും എക്സിറ്റ് ബട്ടൺ ഉണ്ട്, അത് മുമ്പത്തെ മെനുവിലേക്ക് പുറത്തുകടക്കും. നിങ്ങൾ മധ്യ പുഷ് ബട്ടൺ അമർത്തിയാൽ മെനുവിൽ നിന്നും പുറത്തുകടക്കാം.
എല്ലാ മെനുകൾക്കും എക്സിറ്റ് ബട്ടൺ ഉണ്ട്, അത് മുമ്പത്തെ മെനുവിലേക്ക് പുറത്തുകടക്കും. നിങ്ങൾ മധ്യ പുഷ് ബട്ടൺ അമർത്തിയാൽ മെനുവിൽ നിന്നും പുറത്തുകടക്കാം.
ചില ഓപ്ഷനുകൾക്ക് ഉപ മെനുകൾ ഉണ്ട്, അവ അതേ രീതിയിൽ തിരഞ്ഞെടുത്തിരിക്കുന്നു.
5.6.1 ക്യുഎൻഎച്ച്
ഫ്ലൈറ്റ് സമയത്ത് ഉണ്ടാകുന്ന മർദ്ദ വ്യതിയാനങ്ങളുടെ ഫലമായി ഉയര ഡാറ്റ ഓഫ്സെറ്റ് ചെയ്യാൻ ഈ സവിശേഷത ഉപയോഗിക്കാം. QNH മാറ്റുന്നത് സൂചിപ്പിച്ച ഉയരത്തെ സ്വാധീനിക്കുന്നതിനാൽ, മൂല്യം മാറ്റുമ്പോൾ ശ്രദ്ധിക്കണം, കാരണം തെറ്റായ ക്രമീകരണം അന്തിമ ഗ്ലൈഡ് കണക്കുകൂട്ടലിനെ തകിടം മറിച്ചേക്കാം.
5.6.2 ഫ്ലൈറ്റ് റെക്കോർഡർ
SxHAWK വേരിയോ സിസ്റ്റത്തിൽ ഒരു ബിൽറ്റ്-ഇൻ IGC-അംഗീകൃത ഫ്ലൈറ്റ് റെക്കോർഡർ ഉണ്ട്. ഈ മെനുവിൽ ഉപയോക്താവിന് ഫ്ലൈറ്റ് റെക്കോർഡർ പാരാമീറ്ററുകളും പൈലറ്റിന്റെ ഡാറ്റയും സജ്ജമാക്കാൻ കഴിയും.
5.6.2.1 റെക്കോർഡിംഗ് ഇടവേള
റെക്കോർഡിംഗ് ഇടവേള 1 - 20 സെക്കൻഡ് ആയി സജ്ജമാക്കുക.
5.6.2.2 ഓട്ടോ ഫിനിഷ്
ഈ പ്രവർത്തനം പ്രാപ്തമാക്കിയാൽ, ഇനിപ്പറയുന്ന വ്യവസ്ഥകളിൽ ഫ്ലൈറ്റ് റെക്കോർഡർ സ്വയമേവ ഫ്ലൈറ്റ് പൂർത്തിയാക്കും:
- GPS സ്റ്റാറ്റസ് ശരിയാണ്
- ഗ്രൗണ്ട് സ്പീഡ് മണിക്കൂറിൽ 20 കിലോമീറ്ററിൽ താഴെ
- യഥാർത്ഥ വായു വേഗത മണിക്കൂറിൽ 40 കിലോമീറ്ററിൽ താഴെ
- 1 സെക്കൻഡ് നേരത്തേക്ക് 300m/s-ൽ താഴെയുള്ള അബ്സൊല്യൂട്ട് വേരിയൊ.
5.6.2.3 ഓഫാകുന്നതിന് മുമ്പ് പൂർത്തിയാക്കുക
ഈ ക്രമീകരണം പ്രവർത്തനക്ഷമമാക്കിയാൽ, ഉപയോക്താവ് യൂണിറ്റ് ഓഫാക്കിയാൽ ഫ്ലൈറ്റ് പൂർത്തിയാകും.
5.6.2.4 പൈലറ്റ്
ഡിക്ലറേഷനിൽ സൂക്ഷിക്കേണ്ട പൈലറ്റിന്റെ പേര് ചേർക്കുക.
5.6.2.5 കോ-പൈലറ്റ്
രണ്ട് പേർക്ക് ഇരിക്കാവുന്ന വിമാനത്തിലാണ് ഈ സിസ്റ്റം ഉപയോഗിക്കുന്നതെങ്കിൽ സഹപൈലറ്റിന്റെ പേരും നൽകാവുന്നതാണ്.
5.6.2.6 മത്സര നമ്പർ
ഫ്ലൈറ്റിൽ സൂക്ഷിച്ചിരിക്കുന്ന ഗ്ലൈഡറിന്റെ മത്സര നമ്പർ ചേർക്കുക. file.
5.6.2.7 രജിസ്ട്രേഷൻ നമ്പർ
ഫ്ലൈറ്റിൽ സൂക്ഷിച്ചിരിക്കുന്ന ഗ്ലൈഡറിന്റെ രജിസ്ട്രേഷൻ നമ്പർ ചേർക്കുക. file.
5.6.2.8 ടാസ്ക് എഡിറ്റ്
താഴെയുള്ള റോട്ടറി നോബിൽ ഒരു ചെറിയ അമർത്തൽ വഴി എഡിറ്റ് ടാസ്ക് തിരഞ്ഞെടുക്കുന്നത് ടാസ്ക് എഡിറ്റിംഗ് സ്ക്രീനിൽ പ്രവേശിക്കും. ആദ്യമായി ഒരു ടാസ്ക് എഡിറ്റ് ചെയ്യുമ്പോൾ അത് ശൂന്യമായിരിക്കും. താഴെയുള്ള റോട്ടറി നോബിൽ ഒരു ചെറിയ അമർത്തൽ മറ്റൊരു മെനു തുറക്കും, അതിനുള്ള ഓപ്ഷൻ ഇതായിരിക്കും:
- എഡിറ്റ്,
- തിരുകുക,
- ഇല്ലാതാക്കുക,
- മേഖല,
- എല്ലാം ഇല്ലാതാക്കുക
- ഓപ്ഷനുകൾ
'ഇൻസേർട്ട്' തിരഞ്ഞെടുക്കുന്നത് ലിസ്റ്റിൽ നിന്ന് ഒരു വേപോയിന്റ് ഒരു ആരംഭ പോയിന്റായി നൽകാൻ നിങ്ങളെ അനുവദിക്കും. താഴത്തെ റോട്ടറി നോബ് തിരിക്കുന്നത് നിങ്ങളെ അക്ഷരമാലാക്രമത്തിൽ വേപോയിന്റ് ലിസ്റ്റിലൂടെ നീക്കുന്നു, ഘടികാരദിശയിൽ മൂല്യം വർദ്ധിപ്പിക്കുന്നു, എതിർ ഘടികാരദിശയിൽ മൂല്യം കുറയ്ക്കുന്നു. ആവശ്യമുള്ള വേപോയിന്റിന്റെ ആദ്യ അക്ഷരം തിരഞ്ഞെടുക്കാൻ, താഴത്തെ റോട്ടറി നോബ് തിരിക്കുക, തുടർന്ന് അടുത്ത അക്ഷരത്തിന്റെ തിരഞ്ഞെടുപ്പിലേക്ക് നീങ്ങാൻ താഴത്തെ പുഷ് ബട്ടൺ അമർത്തുക. ആവശ്യമായ വേപോയിന്റിന്റെ രണ്ടാമത്തെ അക്ഷരം ഹൈലൈറ്റ് ചെയ്യപ്പെടുന്നതുവരെ താഴത്തെ റോട്ടറി നോബ് തിരിക്കുക, തുടർന്ന് ആവശ്യമുള്ള വേപോയിന്റ് ലഭ്യമായ ഏക തിരഞ്ഞെടുപ്പ് വരെ പ്രക്രിയ ആവർത്തിക്കുക. വേപോയിന്റ് തിരഞ്ഞെടുക്കാൻ ENTER അമർത്തുക. ആരംഭ പോയിന്റ് തിരഞ്ഞെടുത്തുകഴിഞ്ഞാൽ, താഴത്തെ റോട്ടറി നോബ് ഘടികാരദിശയിൽ തിരിക്കുക, രണ്ടാമത്തെ ടേൺ പോയിന്റ് തിരഞ്ഞെടുക്കാൻ ക്ലിക്കുചെയ്യുക. മുകളിലുള്ളതുപോലെ രണ്ടാമത്തെ ടേൺ പോയിന്റ് എഡിറ്റ് ചെയ്യുക. ടാസ്കിലെ എല്ലാ പോയിന്റുകൾക്കും ആവർത്തിക്കുക. ടാസ്ക് എഡിറ്റ് ചെയ്യുന്നത് പൂർത്തിയാക്കിയ ശേഷം, ടാസ്ക് സേവ് ചെയ്യുന്നതിന് (മധ്യ) ബട്ടൺ അമർത്തി ഫ്ലൈറ്റ് ഡിക്ലറേഷൻ മെനുവിലേക്ക് മടങ്ങുക.
5.6.3 വേരിയോ പാരാമീറ്ററുകൾ 
5.6.3.1 വേരിയോ നീഡിൽ ഫിൽട്ടർ
വേരിയോ സൂചി ഫിൽട്ടർ വേരിയോ സൂചിയുടെ സമയ സ്ഥിരാങ്കം സജ്ജമാക്കുന്നു. ഘട്ടം 0.1s അല്ലെങ്കിൽ 5s ഉപയോഗിച്ച് മൂല്യം 1.0 നും 0.1 നും ഇടയിൽ ക്രമീകരിക്കാൻ കഴിയും. സ്ഥിര മൂല്യം 2.0 സെ.
കുറഞ്ഞ സംഖ്യ (0.1 സെക്കന്റുമായി താരതമ്യം ചെയ്യുമ്പോൾ 5.0സെ) അർത്ഥമാക്കുന്നത് വളരെ സെൻസിറ്റീവ് (ഫാസ്റ്റ് വേരിയോ) എന്നാണ്.
5.6.3.2 വേരിയോ സൗണ്ട് ഫിൽട്ടർ
വേരിയോ ശബ്ദത്തിന്റെ സമയ സ്ഥിരാങ്കം സജ്ജമാക്കുന്നു. 0.1 സെക്കൻഡ് അല്ലെങ്കിൽ 5 സെക്കൻഡ് ഘട്ടങ്ങളിൽ മൂല്യം 1.0 മുതൽ 0.1 സെക്കൻഡ് വരെ ക്രമീകരിക്കാം. സ്ഥിര മൂല്യം 2.0 സെ.
5.6.3.3 നെറ്റോ ഫിൽട്ടർ
വേരിയോ നെറ്റോ സൂചിയുടെ സമയ സ്ഥിരാങ്കം സജ്ജമാക്കുന്നു. 0.1 സെക്കൻഡ് അല്ലെങ്കിൽ 5 സെക്കൻഡ് ഘട്ടങ്ങളിൽ മൂല്യം 1.0 മുതൽ 0.1 സെക്കൻഡ് വരെ ക്രമീകരിക്കാം. സ്ഥിര മൂല്യം 4.0 സെ.
5.6.3.4 ആപേക്ഷിക ഫിൽട്ടർ
വേരിയോ റിലേറ്റീവ് സൂചിയുടെ സമയ സ്ഥിരാങ്കം സജ്ജമാക്കുന്നു. 0.1 സെക്കൻഡ് അല്ലെങ്കിൽ 5 സെക്കൻഡ് ഘട്ടങ്ങളിൽ മൂല്യം 1.0 മുതൽ 0.1 സെക്കൻഡ് വരെ ക്രമീകരിക്കാം. സ്ഥിര മൂല്യം 4.0 സെ.
5.6.3.5 SC ഫിൽട്ടർ
SC ഫിൽട്ടർ സ്പീഡ്-ടു-ഫ്ലൈ സൂചിയുടെ സമയ സ്ഥിരാങ്കം സജ്ജമാക്കുന്നു. 0.1 സെക്കൻഡ് അല്ലെങ്കിൽ 5 സെക്കൻഡ് ഘട്ടങ്ങളിൽ മൂല്യം 1.0 മുതൽ 0.1 സെക്കൻഡ് വരെ ക്രമീകരിക്കാം. സ്ഥിര മൂല്യം 4.0 സെ.
5.6.3.6 സ്മാർട്ട് ഫിൽട്ടർ
Smart vario ഫിൽട്ടർ ഉപയോഗിച്ച് ലംബ വേഗത കൂടുതൽ ഫിൽട്ടർ ചെയ്യാൻ കഴിയും. സ്മാർട്ട് വേരിയോ ഫിൽട്ടർ വേരിയോ സൂചിയുടെ പരമാവധി വേഗത നിർവചിക്കുന്നു. "1" ആണ് ഏറ്റവും ഉയർന്നത് damping, ഏറ്റവും താഴ്ന്നത് "8".
"ഓഫ്" എന്നാൽ അധിക ഫിൽട്ടറിംഗ് ഇല്ല എന്നാണ് അർത്ഥമാക്കുന്നത്.
5.6.3.7 നീഡിൽ റേഞ്ച്
നീഡിൽ ശ്രേണി വേരിയോയുടെ പൂർണ്ണമായ ശ്രേണി സജ്ജീകരിക്കുന്നു (2.5 m/s, 5 m/s അല്ലെങ്കിൽ 10 m/s). സ്ഥിര മൂല്യം 5 m/s (10 kts) ആണ്.
5.6.3.8 ഓട്ടോ എസ്സി (സ്പീഡ് കമാൻഡ്)
ഇൻസ്ട്രുമെന്റ് (സൂചി) വേരിയോ, സ്പീഡ് ടു ഫ്ലൈ മോഡ് എന്നിവയ്ക്കിടയിൽ യാന്ത്രികമായി മാറുന്ന സാഹചര്യങ്ങൾ ഓട്ടോ എസ്സി നിർവചിക്കുന്നു. ഇത് ഒരു സൂചി മോഡ് മാത്രമാണ്.
- ഓഫ്: SxHAWK-യുമായി ബന്ധിപ്പിച്ചിരിക്കുന്ന ഒരു ബാഹ്യ സ്വിച്ച് വഴി മാത്രം സ്വിച്ചുചെയ്യൽ. റിമോട്ട് സ്റ്റിക്കുകളുടെ പുതിയ പതിപ്പുകളിൽ, റിമോട്ട് സ്റ്റിക്കും വാരിയോ യൂണിറ്റും തമ്മിൽ ഇനി ഒരു "ഭൗതിക" സ്വിച്ച് കണക്ഷൻ ഇല്ല - ഇത് RS485 ബസ് വഴി ബന്ധിപ്പിച്ചിരിക്കുന്ന റിമോട്ട് സ്റ്റിക്കിലെ ഒരു സ്വിച്ചാണ്.
- ജിപിഎസ്: ഗ്ലൈഡർ വട്ടമിടുന്നത് GPS കണ്ടെത്തുമ്പോൾ, ഏകദേശം 10 സെക്കൻഡുകൾക്ക് ശേഷം വേരിയോയിലേക്ക് ഒരു യാന്ത്രിക മാറ്റം സംഭവിക്കും. നേരായ ഫ്ലൈറ്റിന്റെ കണ്ടെത്തൽ സ്പീഡ് കമാൻഡിൽ മാറ്റത്തിന് കാരണമാകും.
- ഐഎഎസ്: ഐഎഎസ് മുൻകൂട്ടി നിശ്ചയിച്ച മൂല്യം കവിയുമ്പോൾ. 5 മുതൽ 100 കി.മീ/മണിക്കൂർ വരെയുള്ള 160 കി.മീ/മണിക്കൂർ ചുവടുകളിൽ സ്വിച്ചിംഗ് സംഭവിക്കുന്ന ഐ.എ.എസ് തിരഞ്ഞെടുക്കാവുന്നതാണ് (അല്ലെങ്കിൽ കെട്ടുകളിലോ mph-ൽ തുല്യമായത്).
- ജി-മീറ്റർ - ഇനേർഷ്യൽ സിസ്റ്റം അളക്കുന്ന ജി അടിസ്ഥാനമാക്കി ക്രൂയിസ്, ക്ലൈംബ് മോഡുകൾക്കിടയിൽ മാറുന്നതിന്. ഗ്ലൈഡർ വട്ടമിട്ടു പറക്കാൻ തുടങ്ങുമ്പോൾ SxHAWK യാന്ത്രികമായി ക്രൂയിസിൽ നിന്ന് ക്ലൈംബ് മോഡിലേക്ക് മാറും.
- NMEA ഇൻപുട്ട് – NMEA ഇൻപുട്ട് തിരഞ്ഞെടുത്തിട്ടുണ്ടെങ്കിൽ, LX9xxx-ലേക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്ന കമ്മ്യൂണിക്കേഷൻ കേബിൾ വഴി SC നിയന്ത്രിക്കപ്പെടും. NMEA9 കമ്മ്യൂണിക്കേഷൻ വഴി LX0183xxx SC സ്റ്റാറ്റസ് നൽകും. ഈ ഫംഗ്ഷൻ പ്രവർത്തനക്ഷമമാക്കാൻ, ദയവായി Lx9xxx-ൽ PLXVS വാക്യം പ്രവർത്തനക്ഷമമാക്കുക.
![]() LXNAV SxHAWK-ലേക്ക് വയർ ചെയ്തിരിക്കുന്ന ബാഹ്യ സ്വിച്ചിന് കേവല മുൻഗണനയുണ്ട്, അത് മറ്റെല്ലാ സ്വിച്ചിംഗ് രീതികളെയും അസാധുവാക്കും. VP (വേരിയോ മുൻഗണന) ഇൻപുട്ടിന് ഒരു ഹാർഡ്-വയർഡ് SC സ്വിച്ചും അസാധുവാക്കാൻ കഴിയും.
LXNAV SxHAWK-ലേക്ക് വയർ ചെയ്തിരിക്കുന്ന ബാഹ്യ സ്വിച്ചിന് കേവല മുൻഗണനയുണ്ട്, അത് മറ്റെല്ലാ സ്വിച്ചിംഗ് രീതികളെയും അസാധുവാക്കും. VP (വേരിയോ മുൻഗണന) ഇൻപുട്ടിന് ഒരു ഹാർഡ്-വയർഡ് SC സ്വിച്ചും അസാധുവാക്കാൻ കഴിയും.
![]() ഗ്രൗണ്ടിൽ എസ്സി മോഡിൽ നാവ്ബോക്സുകൾ കോൺഫിഗർ ചെയ്യുന്നതിന് നിങ്ങൾ ആദ്യം ഓട്ടോ എസ്സി ഓഫ് ചെയ്യുകയും നാവ്ബോക്സുകൾ കോൺഫിഗർ ചെയ്യുകയും തുടർന്ന് ഓട്ടോ എസ്സി നിങ്ങളുടെ ഇഷ്ടപ്പെട്ട ക്രമീകരണത്തിലേക്ക് തിരികെ സജ്ജീകരിക്കുകയും വേണം.
ഗ്രൗണ്ടിൽ എസ്സി മോഡിൽ നാവ്ബോക്സുകൾ കോൺഫിഗർ ചെയ്യുന്നതിന് നിങ്ങൾ ആദ്യം ഓട്ടോ എസ്സി ഓഫ് ചെയ്യുകയും നാവ്ബോക്സുകൾ കോൺഫിഗർ ചെയ്യുകയും തുടർന്ന് ഓട്ടോ എസ്സി നിങ്ങളുടെ ഇഷ്ടപ്പെട്ട ക്രമീകരണത്തിലേക്ക് തിരികെ സജ്ജീകരിക്കുകയും വേണം.
5.6.3.8.1 ബാഹ്യ SC സ്വിച്ച് ഇൻസ്റ്റാൾ ചെയ്തിട്ടില്ല.
നിങ്ങൾക്ക് ഒരു ബാഹ്യ SC സ്വിച്ചോ ഫ്ലാപ്പ് സ്വിച്ചോ ഇല്ലെങ്കിൽ, നിങ്ങൾ ഇത് സ്വമേധയാ ചെയ്യണം.
നടപടിക്രമം ഇപ്രകാരമാണ്:
- ഹാർഡ്വെയർ ഇൻപുട്ട് ക്രമീകരണങ്ങൾക്ക് താഴെ പോകുക
- ഇൻപുട്ടുകളിൽ ഒന്ന് “SC സ്വിച്ച്” ആയി നൽകുക.
നിങ്ങൾക്ക് രണ്ട് SC സ്വിച്ച് സ്റ്റേറ്റുകളുണ്ട്, ചുവപ്പും പച്ചയും. അവയിലൊന്ന് യൂണിറ്റിനെ ക്രൂയിസ് മോഡിലേക്ക് മാറ്റുകയും നിങ്ങൾക്ക് ഓരോ പേജിലെയും മൂല്യങ്ങൾ മാറ്റുകയും ചെയ്യാം.
പൂർത്തിയാകുമ്പോൾ, ഇൻപുട്ട് തിരികെ ഡിഫോൾട്ടിലേക്ക് മാറ്റുകയും GPS മോഡിലേക്ക് SC സ്വിച്ച് പ്രവർത്തനക്ഷമമാക്കുകയും ചെയ്യുക.
5.6.3.9 TE നഷ്ടപരിഹാരം
LXNAV SxHAWK രണ്ട് രീതിയിലുള്ള വേരിയൊ ടോട്ടൽ എനർജി കോമ്പൻസേഷൻ വാഗ്ദാനം ചെയ്യുന്നു:
- ന്യൂമാറ്റിക് ടിഇ പിറ്റോട്ട് ട്യൂബ്
- ഇലക്ട്രോണിക് TE നഷ്ടപരിഹാരം
![]() TE, സ്റ്റാറ്റിക് പോർട്ടുകൾ എന്നിവയിലേക്ക് നിർമ്മിച്ച ന്യൂമാറ്റിക് കണക്ഷനുകളുടെ അടിസ്ഥാനത്തിൽ ഉപകരണം ഇൻസ്റ്റാൾ ചെയ്യുമ്പോൾ TE നഷ്ടപരിഹാര രീതി നിർവചിക്കപ്പെടുന്നു എന്നത് ശ്രദ്ധിക്കേണ്ടതാണ്. താഴെയുള്ള സജ്ജീകരണ മോഡിൽ നഷ്ടപരിഹാര തരം മാറ്റുന്നത് നഷ്ടപരിഹാര രീതിയെ മാറ്റില്ല - ആദ്യം ന്യൂമാറ്റിക് പ്ലംബിംഗ് മാറ്റണം.
TE, സ്റ്റാറ്റിക് പോർട്ടുകൾ എന്നിവയിലേക്ക് നിർമ്മിച്ച ന്യൂമാറ്റിക് കണക്ഷനുകളുടെ അടിസ്ഥാനത്തിൽ ഉപകരണം ഇൻസ്റ്റാൾ ചെയ്യുമ്പോൾ TE നഷ്ടപരിഹാര രീതി നിർവചിക്കപ്പെടുന്നു എന്നത് ശ്രദ്ധിക്കേണ്ടതാണ്. താഴെയുള്ള സജ്ജീകരണ മോഡിൽ നഷ്ടപരിഹാര തരം മാറ്റുന്നത് നഷ്ടപരിഹാര രീതിയെ മാറ്റില്ല - ആദ്യം ന്യൂമാറ്റിക് പ്ലംബിംഗ് മാറ്റണം.
![]() TE പിറ്റോട്ട് ട്യൂബ് ബന്ധിപ്പിച്ചിട്ടുണ്ടെങ്കിൽ, TE നഷ്ടപരിഹാരം 0% ആയി സജ്ജീകരിക്കണം. TE നഷ്ടപരിഹാരത്തിന്റെ കൂടുതൽ ക്രമീകരണം സാധ്യമല്ല. TE ട്യൂബിന്റെ ഗുണമേന്മയാണ് ഒരേയൊരു ഘടകം.
TE പിറ്റോട്ട് ട്യൂബ് ബന്ധിപ്പിച്ചിട്ടുണ്ടെങ്കിൽ, TE നഷ്ടപരിഹാരം 0% ആയി സജ്ജീകരിക്കണം. TE നഷ്ടപരിഹാരത്തിന്റെ കൂടുതൽ ക്രമീകരണം സാധ്യമല്ല. TE ട്യൂബിന്റെ ഗുണമേന്മയാണ് ഒരേയൊരു ഘടകം.
![]() ഇലക്ട്രോണിക് TE നഷ്ടപരിഹാരത്തിന്, TE പോർട്ട് സ്റ്റാറ്റിക് ആയി ബന്ധിപ്പിക്കുക. Vario Param TE നഷ്ടപരിഹാരം തുടക്കത്തിൽ 100% ആയി സജ്ജീകരിക്കുക, തുടർന്ന് താഴെ വിവരിച്ചിരിക്കുന്നതുപോലെ ഫ്ലൈറ്റ് ടെസ്റ്റിംഗ് ഉപയോഗിച്ച് ഇത് ക്രമീകരിക്കുക.
ഇലക്ട്രോണിക് TE നഷ്ടപരിഹാരത്തിന്, TE പോർട്ട് സ്റ്റാറ്റിക് ആയി ബന്ധിപ്പിക്കുക. Vario Param TE നഷ്ടപരിഹാരം തുടക്കത്തിൽ 100% ആയി സജ്ജീകരിക്കുക, തുടർന്ന് താഴെ വിവരിച്ചിരിക്കുന്നതുപോലെ ഫ്ലൈറ്റ് ടെസ്റ്റിംഗ് ഉപയോഗിച്ച് ഇത് ക്രമീകരിക്കുക.
5.6.3.9.1 TE ഫൈൻ-ട്യൂണിംഗ്
ഇനിപ്പറയുന്ന നടപടിക്രമം ഉപയോഗിച്ച് ഫ്ലൈറ്റ് സമയത്ത് ഇലക്ട്രോണിക് TE നഷ്ടപരിഹാരം ഫൈൻ-ട്യൂൺ ചെയ്യാൻ കഴിയും:
മിനുസമാർന്ന വായുവിൽ മാത്രം ഇത് ചെയ്യേണ്ടത് അത്യാവശ്യമാണ്; പ്രക്ഷുബ്ധമായ വായുവിൽ TE കൃത്യമായി ട്യൂൺ ചെയ്യാൻ സാധ്യമല്ല.
- TE നഷ്ടപരിഹാരം 100% ആയി സജ്ജമാക്കുക.
- ഏകദേശം 160 കി.മീ/മണിക്കൂർ (75 കിലോമീറ്റർ) വേഗത കൂട്ടുകയും കുറച്ച് സെക്കൻഡ് നേരത്തേക്ക് വേഗത സ്ഥിരമായി നിലനിർത്തുകയും ചെയ്യുക.
- വേഗത പതുക്കെ മണിക്കൂറിൽ 80 കി.മീ (45 കിലോമീറ്റർ) ആയി കുറയ്ക്കുക.
- മനോയുവർ സമയത്ത് വേരിയോ ഇൻഡിക്കേറ്റർ നിരീക്ഷിക്കുക. 160 കി.മീ/മണിക്കൂറിൽ വേരിയോ ഏകദേശം -2 മീ/സെക്കൻഡ് (-4 കിലോമീറ്റർ) സൂചിപ്പിക്കും. വേഗത കുറയ്ക്കുമ്പോൾ വേരിയോ പൂജ്യത്തിലേക്ക് നീങ്ങണം, ഒരിക്കലും പൂജ്യത്തിൽ കൂടരുത്.
- വേരിയോ ഒരു കയറ്റം കാണിക്കുന്നുണ്ടെങ്കിൽ നഷ്ടപരിഹാരം വളരെ കുറവാണ്; TE% വർദ്ധിപ്പിക്കുക, തിരിച്ചും.
- മാറ്റം വിലയിരുത്തുന്നതിനും ആവശ്യമെങ്കിൽ കൂടുതൽ ക്രമീകരണങ്ങൾ വരുത്തുന്നതിനും മറ്റൊരു "സൂം" പരീക്ഷിക്കുക.
പിറ്റോട്ട് ട്യൂബും സ്റ്റാറ്റിക് സ്രോതസ്സുകളും കൂട്ടിച്ചേർത്ത് ഉപകരണത്തിലേക്കുള്ള ന്യൂമാറ്റിക് ലൈനുകൾ ഏകദേശം ഒരേ നീളമുള്ളപ്പോൾ മാത്രമേ ഇലക്ട്രോണിക് ടിഇ നഷ്ടപരിഹാരം ഫലപ്രദമാകൂ. സംയോജിത pitot/static Prandtl ട്യൂബ് ആണ് ഉപയോഗിക്കാൻ ഏറ്റവും മികച്ച സെൻസർ. ഇലക്ട്രോണിക് ടിഇ നഷ്ടപരിഹാരത്തിൽ പ്രശ്നങ്ങൾ അനുഭവപ്പെടുകയാണെങ്കിൽ, ഏറ്റവും സാധ്യതയുള്ള കാരണം ഗ്ലൈഡറിന്റെ സ്റ്റാറ്റിക് ഉറവിടമാണ്.
ഇലക്ട്രോണിക് നഷ്ടപരിഹാരത്തിനായി ന്യൂമാറ്റിക് ട്യൂബുകൾ പ്ലംബിംഗ് ചെയ്ത് TE: 0% ആയി സജ്ജീകരിക്കുന്നതിലൂടെ സ്റ്റാറ്റിക് ഉറവിടം പരിശോധിക്കാം. നിശ്ചലമായ വായുവിൽ ഏകദേശം 160 km/h (75kts) വേഗത കൈവരിക്കുകയും വേഗത 80km/h (45kts) ആയി കുറയ്ക്കുകയും ചെയ്യുക. വേരിയോ സൂചകം നിരീക്ഷിക്കുക. സ്റ്റാറ്റിക് സോഴ്സ് നല്ലതാണെങ്കിൽ, ഒരു കയറ്റം കാണിക്കാൻ വേരിയോ ഉടൻ നീങ്ങാൻ തുടങ്ങണം. സൂചി തുടക്കത്തിൽ സിങ്കിന്റെ വർദ്ധനവ് കാണിക്കുകയും പിന്നീട് കയറ്റത്തിലേക്ക് നീങ്ങുകയും ചെയ്താൽ, ഗ്ലൈഡറിന്റെ സ്റ്റാറ്റിക് സ്രോതസ്സ് അനുയോജ്യമല്ല, കൂടാതെ വിജയകരമായ TE നഷ്ടപരിഹാരം ഇലക്ട്രോണിക് ആയി നൽകാൻ ഒരു മാർഗവുമില്ല. പ്രാൻഡൽ ട്യൂബ് പോലെയുള്ള സമർപ്പിതവും കൃത്യവുമായ ഫിൻ-മൌണ്ടഡ് പിറ്റോട്ട്/സ്റ്റാറ്റിക് സോഴ്സിന്റെ ഉപയോഗം സഹായിച്ചേക്കാം.
5.6.3.10 വേരിയോ ശരാശരി സമയം
ശരാശരി നെറ്റ്റ്റോ വേരിയോയുടെ സംയോജന കാലയളവ് സെക്കൻഡുകളിൽ വേരിയോ ശരാശരി സമയം നിർവചിക്കുന്നു. സ്ഥിരസ്ഥിതി 20 സെക്കൻഡ് ആണ്.
5.6.3.11 ഇന്റഗ്രേറ്റർ റീസെറ്റ്
ഈ ഇനം പ്രവർത്തനക്ഷമമാക്കിയാൽ, SC-യിൽ നിന്ന് Vario മോഡിലേക്ക് മാറുമ്പോൾ ശരാശരി vario (ഇന്റഗ്രേറ്റർ) 0 ആയി പുനഃസജ്ജമാക്കപ്പെടും.
5.6.3.12 താപനില ഓഫ്സെറ്റ്
LXNAV SxHAWK-ൽ ഒരു ബാഹ്യ വായു താപനില (OAT) സെൻസർ ഉൾപ്പെടുത്തിയിട്ടുണ്ട്. ഓഫ്സെറ്റ് ക്രമീകരണം ഉപയോഗിച്ച് ഇത് താപനില അളക്കുന്നതിലെ സ്റ്റാറ്റിക് പിശകുകൾ ശരിയാക്കും.
5.6.3.13 എയർസ്പീഡ് ഓഫ്സെറ്റ്
അളവ് ശരിയല്ലെങ്കിൽ ഉപയോക്താവിന് എയർസ്പീഡ് ഓഫ്സെറ്റ് ഉണ്ടാക്കാനുള്ള സാധ്യതയുണ്ട്.
5.6.3.14 HAWK പ്രവർത്തനക്ഷമമാക്കുക/പ്രവർത്തനരഹിതമാക്കുക
ഈ ചെക്ക്ബോക്സ് ഉപയോഗിച്ച്, പൈലറ്റിന് HAWK സിസ്റ്റം ഓൺ/ഓഫ് ചെയ്യാൻ കഴിയും.
5.6.3.15 HAWK കാറ്റിന്റെ വ്യത്യാസം
കാറ്റിന്റെ വ്യതിയാനം തിരശ്ചീനവും ലംബവുമായ കാറ്റിന്റെ (നെറ്റോ വേരിയോ) വായനകളെ സുഗമമാക്കുന്നു. കാറ്റ് വ്യതിയാനത്തിന്റെ മൂല്യം വലുതാണ്, വായനകൾ കൂടുതൽ അസ്വസ്ഥമാക്കുന്നു. കാറ്റിന്റെ വ്യതിയാനത്തിന് ശുപാർശ ചെയ്യുന്ന മൂല്യം 0.11 ആണ്. HAWK സിസ്റ്റത്തെക്കുറിച്ച് കൂടുതലറിയാൻ, അധ്യായം 7 വായിക്കുക.
5.6.3.16 HAWK തിരശ്ചീന കാറ്റ് ശരാശരി
തിരശ്ചീന കാറ്റ് ശരാശരി കാലയളവിനെ നിർവചിക്കുന്നു, ഇത് ശരാശരി തിരശ്ചീന കാറ്റ് കണക്കുകൂട്ടലിനായി ഉപയോഗിക്കുന്നു, ഇത് കാറ്റ് പേജിൽ ചാര അമ്പടയാളമായി പ്രദർശിപ്പിക്കും.
5.6.3.17 HAWK ലംബ കാറ്റ് ശരാശരി
ശരാശരി ആപേക്ഷിക, ശരാശരി നെറ്റ് കണക്കുകൂട്ടലിനായി ഉപയോഗിക്കുന്ന ഒരു കാലഘട്ടത്തെ ലംബ കാറ്റ് ശരാശരി നിർവചിക്കുന്നു. രണ്ട് മൂല്യങ്ങളും സംഖ്യാ അല്ലെങ്കിൽ ഗ്രാഫിക് പേജിൽ നാവ്ബോക്സായി കാണിക്കാൻ കഴിയും.
5.6.4 ഡിസ്പ്ലേ 
5.6.4.1 ഓട്ടോമാറ്റിക് തെളിച്ചം
ഓട്ടോമാറ്റിക് ബ്രൈറ്റ്നസ് പരിശോധിച്ചാൽ, തെളിച്ചം സജ്ജമാക്കിയിരിക്കുന്ന ഏറ്റവും കുറഞ്ഞതും കൂടിയതുമായ പാരാമീറ്ററുകൾക്കിടയിൽ യാന്ത്രികമായി ക്രമീകരിക്കപ്പെടും. ഓട്ടോമാറ്റിക് ബ്രൈറ്റ്നസ് അൺചെക്ക് ചെയ്താൽ, തെളിച്ചം നിയന്ത്രിക്കുന്നത് ബ്രൈറ്റ്നസ് ക്രമീകരണത്തിലൂടെയാണ്.
5.6.4.2 കുറഞ്ഞ തെളിച്ചം
ഓട്ടോമാറ്റിക് ബ്രൈറ്റ്നസ് ഓപ്ഷനായി ഏറ്റവും കുറഞ്ഞ തെളിച്ചം ക്രമീകരിക്കാൻ ഈ സ്ലൈഡർ ഉപയോഗിക്കുക.
5.6.4.3 പരമാവധി തെളിച്ചം
ഓട്ടോമാറ്റിക് ബ്രൈറ്റ്നസ് ഓപ്ഷനായി പരമാവധി തെളിച്ചം ക്രമീകരിക്കാൻ ഈ സ്ലൈഡർ ഉപയോഗിക്കുക.
5.6.4.4 കൂടുതൽ തെളിച്ചമുള്ളത് നേടുക
ഏത് സമയത്താണ് തെളിച്ചത്തിന് ആവശ്യമായ തെളിച്ചത്തിൽ എത്താൻ കഴിയുകയെന്ന് ഉപയോക്താവിന് വ്യക്തമാക്കാൻ കഴിയും.
5.6.4.5 ഇരുണ്ടതാക്കുക
ഏത് സമയത്താണ് തെളിച്ചത്തിന് ആവശ്യമായ തെളിച്ചത്തിൽ എത്താൻ കഴിയുകയെന്ന് ഉപയോക്താവിന് വ്യക്തമാക്കാൻ കഴിയും.
5.6.4.6 തെളിച്ചം
ഓട്ടോമാറ്റിക് ബ്രൈറ്റ്നെസ് അൺചെക്ക് ചെയ്യുന്നതിലൂടെ, ഈ സ്ലൈഡർ ഉപയോഗിച്ച് നിങ്ങൾക്ക് സ്വമേധയാ തെളിച്ചം സജ്ജമാക്കാൻ കഴിയും.
5.6.4.7 നൈറ്റ് മോഡ് ഡാർക്ക്നസ്
ശതമാനം സജ്ജമാക്കുകtagNIGHT മോഡ് ബട്ടണിൽ അമർത്തിയാൽ ഉപയോഗിക്കേണ്ട തെളിച്ചത്തിന്റെ e.
5.6.5 Files
ദി Files മെനു നിങ്ങളെ Waypoint, FlarmNet എന്നിവ അപ്ലോഡ് ചെയ്യാനോ തിരഞ്ഞെടുക്കാനോ അനുവദിക്കുന്നു. files.  5.6.5.1 വേ പോയിന്റുകളും ടാസ്ക്കുകളും
5.6.5.1 വേ പോയിന്റുകളും ടാസ്ക്കുകളും
വേപോയിന്റുകളും ടാസ്ക്കുകളും മെനു തിരഞ്ഞെടുക്കുന്നത് .cup-ന്റെ ഒരു ലിസ്റ്റ് തുറക്കുന്നു. fileആന്തരിക മെമ്മറിയിൽ ലഭ്യമാണ്. പുതിയ ലിസ്റ്റുകൾ ചേർക്കുക അമർത്തുക fileഎസ്ഡി കാർഡിൽ ഉണ്ട്. തിരഞ്ഞെടുത്തു fileആന്തരിക മെമ്മറിയിലേക്ക് സ്വയമേവ ലോഡ് ചെയ്യുന്നു. 
തിരഞ്ഞെടുത്തു fileറിമൂവ് ഫംഗ്ഷൻ ഉപയോഗിച്ചതിന് ശേഷവും ഇന്റേണൽ മെമ്മറിയിൽ നിന്ന് s നീക്കം ചെയ്യാൻ കഴിയും.
ദി file ഒരു വേ പോയിന്റിന്റെ വലിപ്പം file 1MB ആയി പരിമിതപ്പെടുത്തിയിരിക്കുന്നു. SeeYou പ്രോഗ്രാം ഉപയോഗിച്ച് സൃഷ്ടിച്ച CUP ഫോർമാറ്റ് ആണ് പിന്തുണയ്ക്കുന്നത്. നാവിറ്റർ കമ്പനിയുടെ ഒരു പ്രൊപ്രൈറ്ററി ഫോർമാറ്റായ CUP സ്റ്റാൻഡേർഡ് അനുസരിച്ച് സൃഷ്ടിച്ചിട്ടില്ലെങ്കിൽ CUP യുടെ ചില പതിപ്പുകൾ പൊരുത്തപ്പെടണമെന്നില്ല.
CUP യുടെ എണ്ണം fileഅത് ആകാം viewed അല്ലെങ്കിൽ തിരഞ്ഞെടുത്തത് 20 ആണ്.
5.6.5.2 ലോഗ്ബുക്ക്
ലോഗ്ബുക്ക് പേജ് തീയതി പ്രകാരം അടുക്കിയ എല്ലാ ഫ്ലൈറ്റുകളും ലിസ്റ്റ് ചെയ്യുന്നു.  GPS ഡാറ്റ ഉണ്ടെങ്കിൽ ലോഗ്ബുക്ക് പുറപ്പെടുന്ന തീയതിയും സമയവും കാണിക്കും. മാനുവൽ നാവിഗേഷൻ (GPS ഇല്ലാതെ) ദൈർഘ്യം കാണിക്കുകയും “—” അടയാളങ്ങൾ കൊണ്ട് അടയാളപ്പെടുത്തുകയും ചെയ്യും.
GPS ഡാറ്റ ഉണ്ടെങ്കിൽ ലോഗ്ബുക്ക് പുറപ്പെടുന്ന തീയതിയും സമയവും കാണിക്കും. മാനുവൽ നാവിഗേഷൻ (GPS ഇല്ലാതെ) ദൈർഘ്യം കാണിക്കുകയും “—” അടയാളങ്ങൾ കൊണ്ട് അടയാളപ്പെടുത്തുകയും ചെയ്യും.
![]() താഴെയുള്ള റോട്ടറി ബട്ടണിൽ ഒരു ചെറിയ അമർത്തിയാൽ ഉപയോക്താവിന് ഫ്ലൈറ്റ് ഡൗൺലോഡ് ചെയ്യാം.
താഴെയുള്ള റോട്ടറി ബട്ടണിൽ ഒരു ചെറിയ അമർത്തിയാൽ ഉപയോക്താവിന് ഫ്ലൈറ്റ് ഡൗൺലോഡ് ചെയ്യാം.
5.6.5.3 ഫ്ലാർംനെറ്റ് file
FlarmNet ഓപ്ഷൻ തിരഞ്ഞെടുക്കുന്നത് .fln-ന്റെ ഒരു ലിസ്റ്റ് തുറക്കുന്നു fileഎസ്ഡി കാർഡിലോ ഇന്റേണൽ മെമ്മറിയിലോ ലഭ്യമാണ്. എ തിരഞ്ഞെടുക്കുന്നു file അത് ലോഡ് ചെയ്യുന്നു.  5.6.6 ലോഗ്ബുക്ക്
5.6.6 ലോഗ്ബുക്ക്
ലോഗ്ബുക്ക് പേജ് തീയതി പ്രകാരം അടുക്കിയ എല്ലാ ഫ്ലൈറ്റുകളും ലിസ്റ്റ് ചെയ്യുന്നു.  GPS ഡാറ്റ ഉണ്ടെങ്കിൽ ലോഗ്ബുക്ക് പുറപ്പെടുന്ന തീയതിയും സമയവും കാണിക്കും. മാനുവൽ നാവിഗേഷൻ (GPS ഇല്ലാതെ) ദൈർഘ്യം കാണിക്കുകയും “—” അടയാളങ്ങൾ കൊണ്ട് അടയാളപ്പെടുത്തുകയും ചെയ്യും.
GPS ഡാറ്റ ഉണ്ടെങ്കിൽ ലോഗ്ബുക്ക് പുറപ്പെടുന്ന തീയതിയും സമയവും കാണിക്കും. മാനുവൽ നാവിഗേഷൻ (GPS ഇല്ലാതെ) ദൈർഘ്യം കാണിക്കുകയും “—” അടയാളങ്ങൾ കൊണ്ട് അടയാളപ്പെടുത്തുകയും ചെയ്യും. 
![]() താഴെയുള്ള റോട്ടറി ബട്ടണിൽ ഒരു ചെറിയ അമർത്തിയാൽ ഉപയോക്താവിന് ഫ്ലൈറ്റ് ഡൗൺലോഡ് ചെയ്യാം.
താഴെയുള്ള റോട്ടറി ബട്ടണിൽ ഒരു ചെറിയ അമർത്തിയാൽ ഉപയോക്താവിന് ഫ്ലൈറ്റ് ഡൗൺലോഡ് ചെയ്യാം.
5.6.7 ഗ്രാഫിക്സ്
ഗ്രാഫിക്സ് ഓപ്ഷനിൽ ഇൻഡിക്കേറ്റർ സജ്ജീകരണം, FLARM, തെർമൽ അസിസ്റ്റന്റ്, മോഡുകൾ എന്നിവയ്ക്കുള്ള ഉപ മെനുകൾ ഉണ്ട്.
5.6.7.1 സൂചക സജ്ജീകരണം
ഈ മെനുവിൽ വേരിയോ ഇൻഡിക്കേറ്റർ ഗ്രാഫിക്സും മുൻഗണനകളും ക്രമീകരിക്കാൻ കഴിയും. 
5.6.7.1.1 സൂചികൾ
HAWK ഓപ്ഷൻ ഇൻസ്റ്റാൾ ചെയ്യുമ്പോൾ, ഉപയോക്താവിന് HAWK (നീല) സൂചി, TEK വേരിയോ (ചുവപ്പ്) സൂചി അല്ലെങ്കിൽ രണ്ട് സൂചികളും മാത്രം കാണണമെങ്കിൽ അത് നിർവചിക്കാൻ കഴിയും.
5.6.7.1.2 വേരിയോ സൂചി
വേരിയോ നീഡിൽ എന്നാൽ നിങ്ങളുടെ വേരിയോ വേരിയോ മോഡിൽ ആയിരിക്കുമ്പോഴാണ്. ഒരു സൂചി വേരിയോ, നെറ്റോ, റിലേറ്റീവ് അല്ലെങ്കിൽ ജി-മീറ്ററിലേക്ക് സജ്ജമാക്കാൻ കഴിയും. HAWK ഓപ്ഷൻ ഉപയോഗിക്കുമ്പോൾ വേരിയോ നീഡിൽ റിലേറ്റീവ് ആയി സജ്ജമാക്കാൻ ശുപാർശ ചെയ്യുന്നു.
5.6.7.1.3 എസ്സി സൂചി
SC നീഡിൽ എന്നാൽ നിങ്ങളുടെ vario SC മോഡിൽ ആയിരിക്കുമ്പോഴാണ്. ഒരു നീഡിൽ Vario, Netto Relative അല്ലെങ്കിൽ G-meter ആയി സജ്ജീകരിക്കാം. HAWK ഓപ്ഷൻ ഉപയോഗിക്കുമ്പോൾ SC നീഡിൽ Netto ആയി സജ്ജീകരിക്കാൻ ശുപാർശ ചെയ്യുന്നു.
5.6.7.1.4 മഞ്ഞ ബാർ
മഞ്ഞ ബാർ G-മീറ്ററായോ, കുറഞ്ഞ/പരമാവധി വേരിയായോ അല്ലെങ്കിൽ ബാർ ഇല്ലാത്തതായോ സജ്ജീകരിക്കാം.
5.6.7.1.5 റെഡ് ഡയമണ്ട്
റെഡ് ഡയമണ്ട് ചിഹ്നം നോ ഡയമണ്ട്, ആവറേജ്, നെറ്റോ, ആവറേജ് നെറ്റോ, ജി-മീറ്റർ അല്ലെങ്കിൽ എസ്സി ആയി സജ്ജീകരിക്കാം.
5.6.7.1.6 മാക്രെഡി
നീല ത്രികോണം പ്രവർത്തനക്ഷമമാക്കാനോ പ്രവർത്തനരഹിതമാക്കാനോ കഴിയും.
5.6.7.1.7 തെർമൽ
പച്ച നിറത്തിലുള്ള 'T' പ്രവർത്തനക്ഷമമാക്കാനോ പ്രവർത്തനരഹിതമാക്കാനോ കഴിയും.
5.6.7.1.8 റെഡ് കഴ്സർ സ്റ്റൈൽ
നേർത്ത / മധ്യ അല്ലെങ്കിൽ കട്ടിയുള്ള കഴ്സർ ശൈലിയിൽ ഒന്ന് തിരഞ്ഞെടുക്കാൻ സാധിക്കും.
5.6.7.1.9 സൂചി ശ്രേണി തരം
നോൺ-ലീനിയർ സൂചി അർത്ഥമാക്കുന്നത് പോസിറ്റീവ് ക്ലൈൻഡ് നമ്പറുകൾ ലീനിയർ സ്കെയിലിൽ അല്ല, എന്നാൽ അവ ദുർബലമായ കയറ്റത്തിൽ വിശാലവും വളരെ ശക്തമായ കയറ്റനിരക്കിൽ ഇടുങ്ങിയതുമാണ്. അക്കങ്ങൾക്കിടയിൽ എല്ലായ്പ്പോഴും ഒരേ ഇടം വേണമെന്ന് നിങ്ങൾ ആഗ്രഹിക്കുന്നുവെങ്കിൽ, ലീനിയർ സ്കെയിൽ ഉപയോഗിക്കുക.
5.6.7.1.10 കളർ സ്റ്റൈൽ – ഗേജ്: ഉൾഭാഗം
ഈ ഡയലോഗ് ഉപയോഗിച്ച് നിങ്ങൾക്ക് വേരിയോ ഗേജിന്റെ (ഔട്ടർ റിംഗ്) പശ്ചാത്തല നിറവും ഗേജിനുള്ളിലെ വിവര വൃത്തത്തിന്റെ പശ്ചാത്തല നിറവും മാറ്റാൻ കഴിയും. നിങ്ങൾക്ക് ഇനിപ്പറയുന്ന തിരഞ്ഞെടുപ്പുകൾ ഉണ്ട്:
| ഗേജ് | അകം |
| വെള്ള | കറുപ്പ് (സ്ഥിരസ്ഥിതി) |
| വെള്ള | വെള്ള |
| കറുപ്പ് | വെള്ള |
| കറുപ്പ് | കറുപ്പ് |
5.6.7.1.11 ഉപയോക്താവിന്റെ സന്ദേശം. ട്രാൻസ്പ്.
ഈ ഡയലോഗ് ഉപയോഗിച്ച് നിങ്ങൾക്ക് ഉപയോക്തൃ സന്ദേശങ്ങൾ 0 മുതൽ 100% വരെ ഓവർലേ ആയി പ്രദർശിപ്പിക്കുമ്പോൾ അവയുടെ സുതാര്യത മാറ്റാനാകും. സ്ഥിരസ്ഥിതി 50% ആണ്.
5.6.7.1.12 നവബോക്സ് സുതാര്യത
ഈ ഡയലോഗ് ഉപയോഗിച്ച് നിങ്ങൾക്ക് ഓരോ സ്ക്രീനിലും പൊതിഞ്ഞിരിക്കുന്ന നാവ്ബോക്സുകളുടെ സുതാര്യത 0 മുതൽ 100% വരെ മാറ്റാനാകും. സ്ഥിരസ്ഥിതി 44% ആണ്.
5.6.7.2 തെർമൽ അസിസ്റ്റന്റ്
5.6.7.2.1 തെർമൽ അസിസ്റ്റന്റ് മോഡിലേക്ക് മാറുക
സർക്കിളിംഗ് തിരഞ്ഞെടുക്കുമ്പോൾ, ഗ്ലൈഡർ ഒരു ക്ലൈംബിൽ തിരിയാൻ തുടങ്ങുമ്പോൾ SxHAWK തെർമൽ അസിസ്റ്റന്റ് മോഡിലേക്ക് മാറും. SC-VAR സജ്ജീകരണം തിരഞ്ഞെടുത്തിട്ടുണ്ടെങ്കിൽ, SC മോഡ് വേരിയോ മോഡിലേക്ക് മാറിയാലും ഇത് തെർമൽ മോഡിലേക്കും മാറാം. ബോക്സ് പ്രവർത്തനരഹിതമാക്കിയിട്ടുണ്ടെങ്കിൽ, തെർമൽ അസിസ്റ്റന്റ് മോഡ് സ്വമേധയാ ആക്സസ് ചെയ്യാൻ കഴിയും.
5.6.7.2.2 തെർമൽ അസിസ്റ്റന്റ് പിംഗ് രീതി
തെർമൽ അസിസ്റ്റന്റ് പിംഗ് രീതി പ്രവർത്തനക്ഷമമാക്കിയിട്ടുണ്ടെങ്കിൽ, ഉപയോക്താവ് വൃത്താകൃതിയിൽ ഒരു പിംഗ് കേൾക്കും.
പിങ് ശബ്ദം കേൾക്കുമ്പോൾ, പൈലറ്റ് വൃത്തം വികസിപ്പിക്കുകയും തെർമലിന്റെ മധ്യഭാഗത്തേക്ക് അത് വികസിപ്പിക്കുകയും വേണം. ക്രമീകരണങ്ങളിൽ പിങ് പ്രവർത്തനക്ഷമമാക്കാൻ രണ്ട് രീതികൾ ലഭ്യമാണ്: തെർമൽ പരമാവധിക്ക് മുമ്പുള്ള സമയവും തെർമൽ പരമാവധിക്ക് മുമ്പുള്ള ആംഗിളും. പിങ് വോളിയം സ്പീച്ച് വോളിയം ക്രമീകരണവുമായി ബന്ധപ്പെട്ടിരിക്കുന്നു.
5.6.7.2.3 പിങ്ങിന് മുമ്പുള്ള സമയം
ഈ രീതി ഉപയോഗിക്കുമ്പോൾ, പരമാവധി തെർമൽ ആവൃത്തിക്ക് മുമ്പ് തിരഞ്ഞെടുത്ത സെക്കൻഡുകളുടെ എണ്ണത്തിൽ ഉപയോക്താവിന് ഒരു പിംഗ് (വ്യത്യസ്ത ഓഡിബിൾ സിഗ്നൽ) കേൾക്കാൻ കഴിയും.
5.6.7.2.4 പിങ്ങിന് മുമ്പുള്ള കോൺ
ഈ രീതി ഉപയോഗിക്കുമ്പോൾ, പരമാവധി താപ താപത്തിന് മുമ്പ് തിരഞ്ഞെടുത്ത ഡിഗ്രികളുടെ എണ്ണം ഉപയോക്താവിന് ഒരു പിംഗ് (വ്യത്യസ്ത ശ്രവണ സിഗ്നൽ) കേൾക്കാൻ കഴിയും.
5.6.7.3 ഫ്ലാർം  ഈ മെനുവിൽ നിങ്ങൾക്ക് മാപ്പിൽ FLARM ട്രാഫിക് കാണിക്കാനും മാപ്പിൽ മാത്രം ടാർഗെറ്റ് തിരഞ്ഞെടുക്കാനും ഗ്ലൈഡർ നിറങ്ങൾ മാറ്റാനും FLARM ഒബ്ജക്റ്റ് ടൈംഔട്ടും ഗ്രാഫിക്കൽ ക്രമീകരണങ്ങളും ക്രമീകരിക്കാനും തിരഞ്ഞെടുക്കാം.
ഈ മെനുവിൽ നിങ്ങൾക്ക് മാപ്പിൽ FLARM ട്രാഫിക് കാണിക്കാനും മാപ്പിൽ മാത്രം ടാർഗെറ്റ് തിരഞ്ഞെടുക്കാനും ഗ്ലൈഡർ നിറങ്ങൾ മാറ്റാനും FLARM ഒബ്ജക്റ്റ് ടൈംഔട്ടും ഗ്രാഫിക്കൽ ക്രമീകരണങ്ങളും ക്രമീകരിക്കാനും തിരഞ്ഞെടുക്കാം.
5.6.7.3.1 മാപ്പിലെ ട്രാഫിക്
സ്ക്രീനിൽ FLARM വസ്തുക്കൾ പ്രദർശിപ്പിക്കുന്നതിന് ഡയലോഗ് ബോക്സിൽ ചെക്ക് മാർക്കിടുക.
5.6.7.3.2 മാപ്പിൽ മാത്രം ലക്ഷ്യം തിരഞ്ഞെടുക്കുക
തിരഞ്ഞെടുത്ത ലക്ഷ്യം മാത്രമേ ഭൂപടത്തിൽ ഉണ്ടാകൂ.
5.6.7.3.3 നിറങ്ങൾ
ഇനിപ്പറയുന്ന കാര്യങ്ങൾക്കായി നിറങ്ങൾ സജ്ജമാക്കാൻ കഴിയും:
- നിറത്തിന് മുകളിൽ ഗ്ലൈഡർ
- ഗ്ലൈഡർ ബിലോ കളർ
- ഗ്ലൈഡർ നിയർ കളർ
- തിരഞ്ഞെടുത്ത ലക്ഷ്യ നിറം
5.6.7.3.4 ലേബൽ ടെക്സ്റ്റ്
മാപ്പിൽ, FLARM ഒബ്ജക്റ്റിന് അടുത്തായി കൂടുതൽ അനുബന്ധ വാചകം കാണിക്കാൻ സാധിക്കും.
ഈ ഓപ്ഷൻ None, Competition sign, Climb rate, Relative vertical എന്നിങ്ങനെ സജ്ജമാക്കാം.
5.6.7.3.5 സജീവ സമയപരിധി
FLARM അവസാനമായി കണ്ടതിനുശേഷം ഒരു ഗ്ലൈഡർ ചിഹ്നം മാപ്പിൽ അവശേഷിക്കുന്ന സമയം ക്രമീകരിക്കുന്നു.
5.6.7.3.6 നിഷ്ക്രിയ ടൈംഔട്ട്
FLARM ടാർഗെറ്റ് ലിസ്റ്റിലെ നിഷ്ക്രിയ ഗ്ലൈഡറുകൾക്കുള്ള സമയം നിഷ്ക്രിയ ടൈംഔട്ട് സജ്ജീകരണം സജ്ജമാക്കുന്നു. സജീവ ടൈംഔട്ടിനേക്കാൾ കൂടുതൽ സമയത്തേക്ക് FLARM സിഗ്നൽ നഷ്ടപ്പെട്ട ഗ്ലൈഡറുകളാണ് നിഷ്ക്രിയ ഗ്ലൈഡറുകൾ. ടാർഗെറ്റുകൾ നിഷ്ക്രിയമാവുകയും ഈ സമയത്തേക്ക് FLARM ടാർഗെറ്റ് ലിസ്റ്റിൽ മാത്രം തുടരുകയും ചെയ്യുന്നു.
5.6.7.3.7 തിരഞ്ഞെടുത്ത ലക്ഷ്യത്തിലേക്കുള്ള രേഖ വരയ്ക്കുക
തിരഞ്ഞെടുത്ത ഒരു FLARM ലക്ഷ്യത്തിലേക്ക് വരച്ച ഒരു ലൈൻ പ്രാപ്തമാക്കുന്നതിനോ അപ്രാപ്തമാക്കുന്നതിനോ ഈ ഓപ്ഷൻ പരിശോധിക്കുക.
5.6.7.3.8 ഡ്രോ ഹിസ്റ്ററി
FLARM ടാർഗെറ്റുകൾക്ക് പിന്നിൽ ഒരു പാത വരയ്ക്കണോ വേണ്ടയോ എന്ന് തിരഞ്ഞെടുക്കുക, അത് ലക്ഷ്യങ്ങൾ എവിടെയായിരുന്നുവെന്ന് കാണിക്കും.
5.6.7.3.9 പ്ലെയിൻ ഐക്കൺ വലുപ്പം
FLARM ടാർഗെറ്റുകളുടെ പിക്സൽ വലുപ്പം ക്രമീകരിക്കാൻ ഈ ഇനം ഉപയോഗിക്കുക.
5.6.7.4 മോഡുകൾ
ഈ മെനു വഴി തെർമൽ, FLARM മോഡുകൾ പ്രവർത്തനരഹിതമാക്കാം.
5.6.8 ശബ്ദങ്ങൾ
ശബ്ദ ഓപ്ഷനിൽ ഇക്വലൈസർ, വേരിയോ, ഫ്ലാർം എന്നിവയ്ക്കായി ഒരു ഉപ മെനു ഉണ്ട്.  5.6.8.1 ഇക്വലൈസർ ഓപ്ഷൻ
5.6.8.1 ഇക്വലൈസർ ഓപ്ഷൻ
താഴത്തെ റോട്ടറി നോബ് ഉപയോഗിച്ച്, നിങ്ങൾക്ക് ഓരോ ആവൃത്തിയിലും വോളിയം ക്രമീകരിക്കാൻ കഴിയും. നിങ്ങൾ സ്ക്രീനിൽ നിന്ന് പുറത്തുകടക്കുമ്പോൾ ക്രമീകരണങ്ങൾ സംഭരിക്കപ്പെടും (മധ്യ ബട്ടൺ വഴി). 
5.6.8.2 വേരിയോ ശബ്ദങ്ങൾ  ഈ മെനുവിൽ ഉപയോക്താവിന് vario ശബ്ദങ്ങൾക്കായി എല്ലാ പാരാമീറ്ററുകളും മാറ്റാൻ കഴിയും.
ഈ മെനുവിൽ ഉപയോക്താവിന് vario ശബ്ദങ്ങൾക്കായി എല്ലാ പാരാമീറ്ററുകളും മാറ്റാൻ കഴിയും.
![]() മുകളിലെ റോട്ടറി നോബ് വഴി വാരിയോ, ഫ്ലാർം, സ്പീച്ച് എന്നിവയുടെ ശബ്ദവും നേരിട്ട് ക്രമീകരിക്കാവുന്നതാണ്.
മുകളിലെ റോട്ടറി നോബ് വഴി വാരിയോ, ഫ്ലാർം, സ്പീച്ച് എന്നിവയുടെ ശബ്ദവും നേരിട്ട് ക്രമീകരിക്കാവുന്നതാണ്.
5.6.8.2.1 വേരിയോ വോളിയം
ഉപയോക്താവിന് ഡിഫോൾട്ട് വേരിയോ വോളിയം സജ്ജമാക്കാൻ കഴിയും.
5.6.8.2.2 ശബ്ദ രൂപം
ഈ മെനുവിൽ, നിങ്ങൾക്ക് ഇനിപ്പറയുന്ന ആകൃതികളിൽ നിന്ന് തിരഞ്ഞെടുക്കാം: സൈനസ്, ത്രികോണാകൃതി, ഹാർമോണിക്.
5.6.8.2.3 വേരിയോ ഓഡിയോ മോഡ്:
- ലീനിയർ പോസിറ്റീവ്: സൂചി പോസിറ്റീവ് ആകുമ്പോൾ ഓരോ കുറച്ച് മില്ലിസെക്കൻഡിലും നിശബ്ദതയോടെ ശബ്ദം തടസ്സപ്പെടും; നെഗറ്റീവ് വശത്ത് ശബ്ദം രേഖീയമാണ് (തടസ്സപ്പെടില്ല).
- ലീനിയർ നെഗറ്റീവ്: ലീനിയർ പോസിറ്റീവിലേക്കുള്ള വിപരീത പ്രവർത്തനം.
- ലീനിയർ: ശബ്ദം രേഖീയവും പൂർണ്ണ സ്കെയിൽ ശ്രേണിയിൽ തടസ്സമില്ലാത്തതുമാണ്.
- ഡിജിറ്റൽ പോസിറ്റീവ്: ലീനിയർ പോസിറ്റീവിന് സമാനമാണ്, ബീപ്പ് ചെയ്യുന്ന രീതി sl ആണ് എന്നതൊഴിച്ചാൽ
- ഡിജിറ്റൽ നെഗറ്റീവ്: ഡിജിറ്റൽ പോസിറ്റീവിലേക്കുള്ള വിപരീത പ്രവർത്തനം.
- ലീനിയർ പോസിറ്റീവ് മാത്രം: പോസിറ്റീവ് മൂല്യങ്ങളിൽ മാത്രമേ ശബ്ദം ഉണ്ടാകൂ, നെഗറ്റീവ് മൂല്യങ്ങൾക്ക് നിശബ്ദതയുണ്ട്.
- ഡിജിറ്റൽ പോസിറ്റീവ് മാത്രം: ലീനിയർ പോസിറ്റീവിന് മാത്രമുള്ള സമാനമായ പ്രവർത്തനം, ശബ്ദം ഡിജിറ്റൽ ടോണിന് സമാനമാണെന്നത് ഒഴികെ.
- ഡിജിറ്റൽ: ലീനിയറിന് സമാനമായ പ്രവർത്തനം, ശബ്ദം ഡിജിറ്റൽ ടോണിന് സമാനമാണ് എന്നതൊഴിച്ചാൽ. ആവൃത്തി രേഖീയമായിട്ടല്ല, മറിച്ച് ഘട്ടങ്ങളിലൂടെയാണ് മാറുന്നത്. ഓടക്കുഴൽ വായിക്കുന്നത് പോലെയാണ് തോന്നുന്നത്.
5.6.8.2.4 SC ഓഡിയോ മോഡ്
SC ഓഡിയോ മോഡിന് അഞ്ച് മോഡുകൾ ഉണ്ട്:
- SC പോസിറ്റീവ്: സൂചി പോസിറ്റീവ് ആകുമ്പോൾ ഓരോ കുറച്ച് മില്ലിസെക്കൻഡിലും നിശബ്ദതയോടെ ശബ്ദം തടസ്സപ്പെടും; നെഗറ്റീവ് വശത്ത് ശബ്ദം രേഖീയമാണ് (തടസ്സപ്പെടില്ല).
- SC നെഗറ്റീവ്: SC പോസിറ്റീവിലേക്കുള്ള വിപരീത പ്രവർത്തനം.
- SC: ശബ്ദം പൂർണ്ണ സ്കെയിൽ ശ്രേണിയിൽ രേഖീയവും തടസ്സമില്ലാത്തതുമാണ്.
- SC മിക്സഡ്: പോസിറ്റീവ് ആപേക്ഷിക മൂല്യങ്ങൾക്ക് ശബ്ദം ആപേക്ഷികതയെ പ്രതിനിധീകരിക്കുന്നു; നെഗറ്റീവ് ആപേക്ഷിക മൂല്യങ്ങൾക്ക് ശബ്ദം SCയെ പ്രതിനിധീകരിക്കുന്നു (ആ സജ്ജീകരണത്തിന് SC സൂചി ആപേക്ഷികമായി സജ്ജീകരിക്കാൻ ശുപാർശ ചെയ്യുന്നു).
- ആപേക്ഷികം: വേരിയോമീറ്റർ ആപേക്ഷിക വേഗത മൂല്യങ്ങൾ പിന്തുടരുമെന്നത് ഒഴികെ, വേരിയോ ഓഡിയോയിൽ നിർവചിച്ചിരിക്കുന്ന അതേ ശബ്ദം പുറപ്പെടുവിക്കും.
5.6.8.2.5 വേരിയോ ഓഡിയോ ഉറവിടം
HAWK ഓപ്ഷൻ സജീവമാകുമ്പോൾ Vario ഓഡിയോ ഉറവിടം കാണിക്കുന്നു. വേരിയോമീറ്റർ ശബ്ദത്തിനായി നിങ്ങൾക്ക് HAWK അല്ലെങ്കിൽ TE വേരിയോ ഓഡിയോ ഉറവിടം തിരഞ്ഞെടുക്കാം.
5.6.8.2.6 SC ഓഡിയോ ഉറവിടം
HAWK ഓപ്ഷൻ സജീവമാകുമ്പോൾ SC ഓഡിയോ ഉറവിടം കാണിക്കുന്നു. ശബ്ദം പറക്കാനുള്ള വേഗതയ്ക്കായി നിങ്ങൾക്ക് HAWK അല്ലെങ്കിൽ TE vario SC ഓഡിയോ ഉറവിടം തിരഞ്ഞെടുക്കാം.
5.6.8.2.7 ഡെഡ് ബാൻഡ്
ഡെഡ് ബാൻഡ് ക്രമീകരണം, സ്പീഡ് ടു ഫ്ലൈ മോഡിൽ ഓഡിയോ ഡെഡ് ബാൻഡിന്റെ വീതി നിർവ്വചിക്കുന്നു. സ്ഥിര മൂല്യം ±1 m/s ആണ്.
5.6.8.2.8 ഓഡിയോ ഫ്രീക്വൻസികൾ
- 0% ലെ ഫ്രീക്വൻസി 0 മീ/സെക്കൻഡിലെ ടോൺ ഫ്രീക്വൻസിയെ നിർവചിക്കുന്നു.
- +100% ലെ ഫ്രീക്വൻസി പൂർണ്ണ + ഡിഫ്ലക്ഷനിൽ ടോൺ ഫ്രീക്വൻസി നിർവചിക്കുന്നു.
- -100% ലെ ഫ്രീക്വൻസി പൂർണ്ണ വ്യതിയാനത്തിലെ ടോൺ ഫ്രീക്വൻസി നിർവചിക്കുന്നു.
5.6.8.2.9 ഇക്വലൈസേഷൻ പ്രീ-സെറ്റുകൾ
ഞങ്ങൾക്ക് മൂന്ന് ഓപ്ഷനുകളുണ്ട്: ഡിഫോൾട്ട് LXNAV സ്പീക്കർ, ഫ്ലാറ്റ് സെറ്റിംഗ് അല്ലെങ്കിൽ യൂസർ നിർവചിച്ചത്.
![]() മുകളിലെ റോട്ടറി നോബ് വഴി വാരിയോ, ഫ്ലാർം, സ്പീച്ച് എന്നിവയുടെ ശബ്ദവും നേരിട്ട് ക്രമീകരിക്കാവുന്നതാണ്.
മുകളിലെ റോട്ടറി നോബ് വഴി വാരിയോ, ഫ്ലാർം, സ്പീച്ച് എന്നിവയുടെ ശബ്ദവും നേരിട്ട് ക്രമീകരിക്കാവുന്നതാണ്.
5.6.8.2.10 ശബ്ദ പരിശോധന
ശബ്ദ സന്ദേശങ്ങളുടെ ഗുണനിലവാരം പരിശോധിക്കുന്നതിന് ഈ ബട്ടൺ അമർത്തുക.
5.6.8.3 ഫ്ലാർം ശബ്ദങ്ങൾ 
5.6.8.3.1 FLARM വോളിയം
സ്ലൈഡർ ഉപയോഗിച്ച് ഡിഫോൾട്ട് FLARM വോളിയം ക്രമീകരിക്കുക.
5.6.8.3.2 FLARM ലോ അലാറം
ദൂരെയുള്ള FLARM ടാർഗെറ്റുകൾക്ക് SxHAWK ഒരു ഹ്രസ്വമോ ദീർഘമോ ആയ സന്ദേശം നൽകുന്നു, ഒരു ബീപ്പ് ശബ്ദം മാത്രം മുഴക്കുക അല്ലെങ്കിൽ ഓഫ് ചെയ്യുക (സാധ്യമായ കൂട്ടിയിടിക്ക് 19-25 സെക്കൻഡ് മുമ്പ്).
5.6.8.3.3 FLARM പ്രധാന അലാറം
അടുത്ത FLARM ടാർഗെറ്റുകൾക്ക് SXHAWK-യ്ക്ക് ഒരു ഹ്രസ്വമോ ദീർഘമോ ആയ സന്ദേശം നൽകാൻ കഴിയും, ഒരു ബീപ്പ് മാത്രം അല്ലെങ്കിൽ ഓഫ് ചെയ്യാൻ കഴിയും (സാധ്യമായ കൂട്ടിയിടിക്ക് 14-18 സെക്കൻഡ് മുമ്പ്).
5.6.8.3.4 ഫ്ലാർം അടിയന്തിര അലാറം:
വളരെ അടുത്തുള്ള FLARM ടാർഗെറ്റുകൾക്ക് SxHAWK ഒരു ഹ്രസ്വമോ ദീർഘമോ ആയ സന്ദേശം നൽകുന്നു, ഒരു ബീപ്പ് മാത്രം അല്ലെങ്കിൽ ഓഫ് ചെയ്യുക (സാധ്യമായ കൂട്ടിയിടിക്ക് 6-8 സെക്കൻഡ് മുമ്പ്).
![]() മുകളിലെ റോട്ടറി നോബ് വഴി വാരിയോ, ഫ്ലാർം, സ്പീച്ച് എന്നിവയുടെ ശബ്ദവും നേരിട്ട് ക്രമീകരിക്കാവുന്നതാണ്.
മുകളിലെ റോട്ടറി നോബ് വഴി വാരിയോ, ഫ്ലാർം, സ്പീച്ച് എന്നിവയുടെ ശബ്ദവും നേരിട്ട് ക്രമീകരിക്കാവുന്നതാണ്.
അലാറം ശബ്ദത്തിനായി ഉപയോക്താവിന് ബീപ്പ്, ഹ്രസ്വ സന്ദേശം, നീണ്ട സന്ദേശ ശബ്ദങ്ങൾ എന്നിവയിൽ നിന്ന് തിരഞ്ഞെടുക്കാനുള്ള സാധ്യതയുണ്ട്.
"രണ്ട് മണി ട്രാഫിക്" എന്ന രീതിയിലാണ് ഹ്രസ്വ സന്ദേശം.
"രണ്ട് മണി ട്രാഫിക്, രണ്ട് കിലോമീറ്റർ, ഇരുനൂറ് മീറ്റർ മുകളിൽ" എന്ന രീതിയിലുള്ള ഒരു നീണ്ട സന്ദേശം.
5.6.9 മുന്നറിയിപ്പുകൾ  FLARM, Altitude, Airspace മുന്നറിയിപ്പുകൾ ഉണ്ട്.
FLARM, Altitude, Airspace മുന്നറിയിപ്പുകൾ ഉണ്ട്.
5.6.9.1 ഫ്ലാർം
5.6.9.1.1 FLARM മുന്നറിയിപ്പുകൾ പ്രാപ്തമാക്കുക
ഈ വിഭാഗത്തിൽ മുന്നറിയിപ്പുകൾ പ്രാപ്തമാക്കാനോ അപ്രാപ്തമാക്കാനോ കഴിയും.
മുന്നറിയിപ്പ് നിരസിക്കൽ സമയം 0 മുതൽ 120 സെക്കൻഡ് വരെ സജ്ജീകരിക്കാം.
5.6.9.1.2 ഡിസ്പ്ലേ PCAS അലാറങ്ങൾ
FLARM സ്ക്രീനിൽ നോൺ-ദിശാസൂചക ട്രാഫിക് കാണാൻ ഈ ഇനം പരിശോധിക്കുക. എയർക്രാഫ്റ്റ് പൊസിഷനിൽ നിന്ന് ലഭിച്ച ദൂരത്തിൽ നോൺ-ദിശാസൂചക ട്രാഫിക് ഒരു ഡോട്ട് ഇട്ട വൃത്തം ഉപയോഗിച്ച് വരയ്ക്കും. അടുത്ത ടൈം സ്പിൻ കൺട്രോളിൽ PCAS ടൈംഔട്ട് പ്രത്യേകം സജ്ജീകരിച്ചിരിക്കുന്നു.
5.6.9.1.3 അടിയന്തര അലാറങ്ങൾ പ്രദർശിപ്പിക്കുക
പ്രവചിക്കപ്പെട്ട കൂട്ടിയിടിക്ക് ഏകദേശം 8 സെക്കൻഡ് മുമ്പ് മൂന്നാം ലെവൽ.
5.6.9.1.4 പ്രധാനപ്പെട്ട അലാറങ്ങൾ പ്രദർശിപ്പിക്കുക
പ്രവചിക്കപ്പെട്ട കൂട്ടിയിടിക്ക് ഏകദേശം 13 സെക്കൻഡ് മുമ്പ് രണ്ടാം ലെവൽ.
5.6.9.1.5 ഡിസ്പ്ലേ ലോ അലാറങ്ങൾ
പ്രവചിക്കപ്പെട്ട കൂട്ടിയിടിക്ക് ഏകദേശം 18 സെക്കൻഡ് മുമ്പ് ആദ്യ ലെവൽ.
5.6.9.1.6 വട്ടമിട്ടു പറക്കുമ്പോൾ ഡിസ്മിസ് ചെയ്യുക
ഇത് ഒരേ തെർമലിൽ FLARM ടാർഗെറ്റുകൾക്കായുള്ള FLARM അലാറങ്ങളെ നിരസിക്കുന്നു. അടിയന്തര അലേർട്ടുകൾക്കുള്ള FLARM മുന്നറിയിപ്പുകൾ ഇതിനെ മറികടക്കുന്നു.
5.6.9.1.7 ഡിസ്മിസ് സമയം
ഒരു FLARM മുന്നറിയിപ്പ് നിരസിച്ചാൽ, ആ മെനുവിൽ സജ്ജീകരിച്ചിരിക്കുന്ന സെക്കൻഡുകളുടെ എണ്ണത്തിൽ FLARM മുന്നറിയിപ്പുകൾ ഉണ്ടാകില്ല. ഒരു നിശ്ചിത FLARM അലാറം ഓഫാക്കിക്കഴിഞ്ഞാൽ, താഴെയുള്ള നോബ് അമർത്തി ആ നിശ്ചിത സെക്കൻഡ് സമയത്തേക്ക് നിങ്ങൾക്ക് അത് നിർജ്ജീവമാക്കാം.
5.6.9.2 ദൃശ്യ സന്ദേശങ്ങൾ/മുന്നറിയിപ്പുകൾ  SxHAWK ഇനിപ്പറയുന്ന ദൃശ്യ സന്ദേശങ്ങൾ/മുന്നറിയിപ്പുകൾ നൽകും:
SxHAWK ഇനിപ്പറയുന്ന ദൃശ്യ സന്ദേശങ്ങൾ/മുന്നറിയിപ്പുകൾ നൽകും:
- ഡിജിറ്റൽ സിഗ്നേച്ചർ പരാജയപ്പെട്ടു (പ്രാരംഭ സജ്ജീകരണത്തിനുശേഷം അത് ഉടൻ ദൃശ്യമാകും)
- മരവിപ്പിക്കുന്ന താപനില (ഇത് OAT അളവുമായി ബന്ധപ്പെട്ടിരിക്കുന്നു)
- പുറത്തുള്ള മേഖല
- എയർ ബ്രേക്കുകൾ ലോക്ക് ചെയ്തിട്ടില്ല
- ലാൻഡിംഗ് ഗിയർ പരിശോധിക്കുക
- ബാഹ്യ ബാറ്ററി കുറവാണ്
- ആന്തരിക ബാറ്ററിയിൽ പ്രവർത്തിക്കുന്നു (ഫ്ലൈറ്റ് റെക്കോർഡർ പ്രവർത്തിക്കുന്നുണ്ടെങ്കിൽ)

- ഷട്ട് ഡൗൺ ചെയ്യുന്നു (ഫ്ലൈറ്റ് റെക്കോർഡർ പ്രവർത്തിക്കുന്നില്ലെങ്കിലും ബാഹ്യ വൈദ്യുതി ഇല്ലെങ്കിൽ)
- മരവിപ്പിക്കുന്ന താപനില (പുറത്തെ താപനില 1 ഡിഗ്രിയാണെങ്കിൽ)
5.6.9.3 ശബ്ദ മുന്നറിയിപ്പുകൾ
SxHAWK ഇനിപ്പറയുന്ന ശബ്ദ മുന്നറിയിപ്പുകൾ ട്രിഗർ ചെയ്യും:
ഗിയർ മുന്നറിയിപ്പുകൾ
ഗിയർ പരിശോധിക്കുക: പറന്നുയർന്ന് 5 മിനിറ്റിനുശേഷം ലാൻഡിംഗ് ഗിയർ SxHAWK യുടെ ഏതെങ്കിലും ഇൻപുട്ടുകളിലേക്ക് ബന്ധിപ്പിച്ചിട്ടില്ലെങ്കിൽ ഈ മുന്നറിയിപ്പ് ലഭിക്കും.
ലാൻഡിംഗ് ഗിയർ പരിശോധിക്കുക: പറക്കുന്നതിനിടയിൽ, സജ്ജരാകുക*, എയർ ബ്രേക്കുകൾ തുറക്കുക*.
എയർബ്രേക്കുകൾക്കുള്ള മുന്നറിയിപ്പുകൾ
എയർബ്രേക്കുകൾ പരിശോധിക്കുക: നിങ്ങൾ നിലത്താണെങ്കിൽ, വേഗത 0, ഗിയർ ഡൗൺ ചെയ്യുക*, എയർബ്രേക്കുകൾ തുറക്കുക*. ഈ മുന്നറിയിപ്പ് ഓരോ 30 സെക്കൻഡിലും ആവർത്തിക്കുന്നു.
മുന്നറിയിപ്പ് എയർബ്രേക്കുകൾ, മുന്നറിയിപ്പ് എയർബ്രേക്കുകൾ...: ആക്സിലറേഷൻ സമയത്ത്, ഗിയർ ഡൗൺ ചെയ്യുക*, എയർബ്രേക്കുകൾ തുറക്കുക*.
എയർബ്രേക്കുകൾ പരിശോധിക്കുക: വേഗത, എയർബ്രേക്കുകൾ തുറന്നു*.
ബാറ്ററി കുറവാണ് (ബാറ്ററി കുറവാണെങ്കിൽ - ബാറ്ററി കെമിസ്ട്രി ക്രമീകരണം കാണുക).
സ്റ്റാൾ വേഗത (മുന്നറിയിപ്പ് മെനുവിൽ സജ്ജീകരിച്ചിരിക്കുന്ന സ്റ്റാൾ വേഗതയുമായി ബന്ധപ്പെട്ടിരിക്കുന്നു).
FLARM വോയ്സ് സന്ദേശം ദൈർഘ്യമേറിയതാണ്: ട്രാഫിക്ക് ഇവിടെ: സ്ഥാനം, ദൂരം, ലംബ ദൂരം.
FLARM വോയ്സ് സന്ദേശം ഹ്രസ്വം: ട്രാഫിക് ഇവിടെ: സ്ഥാനം.
*എയർബ്രേക്കുകൾ കൂടാതെ/അല്ലെങ്കിൽ ലാൻഡിംഗ് ഗിയർ ഡിജിറ്റൽ ഇൻപുട്ടുകളിലേക്ക് വയർ ചെയ്യണം!
5.6.10 യൂണിറ്റുകൾ
യൂണിറ്റുകൾ, UTC സമയ ഓഫ്സെറ്റ്, ബാലസ്റ്റ് ഇൻപുട്ടിന്റെ തരം എന്നിവ വ്യക്തമാക്കാൻ ഈ മെനു ഉപയോഗിക്കുക.
- UTC ഓഫ്സെറ്റ്: പകുതി മണിക്കൂറിലോ മുഴുവൻ മണിക്കൂറിലോ സുലു പ്ലസ് അല്ലെങ്കിൽ മൈനസ്.
- യൂണിറ്റുകളുടെ സിസ്റ്റം: മെട്രിക്, ഇംഗ്ലീഷ്, യുഎസ്.
- ദൂരം: ലഭ്യമായ യൂണിറ്റുകൾ; സ്റ്റാറ്റ്യൂട്ട് മൈലുകൾ, നോട്ടിക്കൽ മൈലുകൾ, കിലോമീറ്ററുകൾ.
- ഉയരം: ലഭ്യമായ യൂണിറ്റുകൾ അടി, മീറ്ററുകൾ.
- താപനില: ലഭ്യമായ യൂണിറ്റുകൾ; ഡിഗ്രി സെന്റിഗ്രേഡ് അല്ലെങ്കിൽ ഡിഗ്രി ഫാരൻഹീറ്റ്.
- മർദ്ദം: ലഭ്യമായ യൂണിറ്റുകൾ; മെർക്കുറി ഇഞ്ച് (inHg), മെർക്കുറി mm (mmHg), mbar.
- വേഗത: ലഭ്യമായ യൂണിറ്റുകൾ; fpm, m/s, mph, kts, km/h.
- XC വേഗത: ലഭ്യമായ യൂണിറ്റുകൾ; fpm, m/s, mph, kts, km/h.
- ലംബ വേഗത: ലഭ്യമായ യൂണിറ്റുകൾ; fpm, m/s, mph, kts, km/h.
- കാറ്റ്: ലഭ്യമായ യൂണിറ്റുകൾ; fpm, m/s, mph, kts, km/h.
- ഭാരം: പൗണ്ട് അല്ലെങ്കിൽ കിലോ
- ലോഡ്: lb/ft2 അല്ലെങ്കിൽ kg/m2
- രേഖാംശം/അക്ഷാംശം: DD.ddddd, DDMM.mmmmm', DDMM'SS.ss”, DD.dddd, DDMM.mmm', DDMM'SS”
- ബാലസ്റ്റ്: ഭാരം (ബാലസ്റ്റ് കിലോഗ്രാമിൽ ചേർക്കുക), ലോഡ് (ബാലസ്റ്റ് കിലോഗ്രാം/m2), ഓവർലോഡ് (ഓവർലോഡിന്റെ ഘടകം).
5.6.11 ഹാർഡ്വെയർ
ഹാർഡ്വെയർ സജ്ജീകരണത്തിന് ഡിജിറ്റൽ ഇൻപുട്ടുകൾ, ഇൻഡിക്കേറ്റർ, കമ്മ്യൂണിക്കേഷൻസ്, ബാറ്ററി, റിമോട്ട് സ്റ്റിക്ക്, ഫ്ലാപ്പുകൾ, ബ്രിഡ്ജ് എന്നിവയ്ക്കായി ഒരു ഉപ മെനു ഉണ്ട്. 
5.6.11.1 ഡിജിറ്റൽ ഇൻപുട്ടുകൾ 
ഡെലിവറിയിൽ ഫാക്ടറി ഡിഫോൾട്ടായി ഈ ഇൻപുട്ട് വയറുകൾ തുറന്നിരിക്കും (ഗ്രൗണ്ടഡ് അല്ല). ഇൻപുട്ടിനും ഗ്രൗണ്ടിനും ഇടയിൽ നിങ്ങൾ ഒരു സ്വിച്ച് വയർ ചെയ്യേണ്ടതുണ്ട്.
5.6.11.1.1 VP ഇൻപുട്ട് (വേരിയോ പ്രയോറിറ്റി)
ഉചിതമായ വയർ ഗ്രൗണ്ട് ചെയ്ത് ഈ ഇൻപുട്ട് സജീവമാക്കുമ്പോൾ, യൂണിറ്റ് ഉടൻ തന്നെ വാരിയോയിലേക്ക് മാറും. എല്ലാ SC സ്വിച്ചിംഗ് രീതികളേക്കാളും ഈ സ്വിച്ചിന് മുൻഗണനയുണ്ട്. അതായത് ഇത് SC-യ്ക്കുള്ള മറ്റെല്ലാ സിഗ്നലുകളും മറികടന്ന് യൂണിറ്റിനെ വേരിയോ മോഡിലേക്ക് മാറ്റും. സ്റ്റാൻഡേർഡ് വയറിംഗിൽ ഈ ഇൻപുട്ട് വയർ ചെയ്തിട്ടില്ല - ഇത് ഉപഭോക്താവ് വയർ ചെയ്യണം.
5.6.11.1.2 എസ്സി സ്വിച്ച്
LXNAV SxHAWK-യിൽ ഒരു എക്സ്റ്റേണൽ സ്പീഡ് കമാൻഡ് സ്വിച്ചിനുള്ള ഇൻപുട്ട് ഉണ്ട്. എക്സ്റ്റേണൽ സ്വിച്ച് ഉപയോഗിച്ച്, SC-യും Vario-യും തമ്മിൽ സ്വമേധയാ മാറാൻ കഴിയും. SC സ്വിച്ച് ON ആക്കി സജ്ജീകരിക്കുന്നത് സ്വിച്ച് അടയ്ക്കുന്നത് ഉപകരണം SC മോഡിലേക്ക് പ്രവേശിക്കാൻ ഇടയാക്കും. SC സ്വിച്ച് OFF ആക്കി സജ്ജീകരിക്കുന്നത് സ്വിച്ച് അടയ്ക്കുന്നത് Vario മോഡ് തിരഞ്ഞെടുക്കാൻ കാരണമാകും എന്നാണ്. SC INPUT TASTER-ലേക്ക് സജ്ജീകരിച്ച് ഒരു പുഷ് ബട്ടൺ ഇൻപുട്ടിലേക്ക് ബന്ധിപ്പിക്കുന്നതിലൂടെ മൂന്നാമത്തെ ഓപ്ഷൻ ഉണ്ട്; ഓരോ കീ അമർത്തലും SC-യും Vario-യും തമ്മിൽ ടോഗിൾ ചെയ്യും (LX റിമോട്ടിന് നിർബന്ധിത ക്രമീകരണം, ഇത് SC-ക്ക് ഒരു പുഷ് ബട്ടൺ നൽകുന്നു).
5.6.11.1.3 ഡിജിറ്റൽ ഇൻപുട്ടുകൾ 1,2,3,4
LXNAV SxHAWK-യിൽ 4 ബാഹ്യ ഡിജിറ്റൽ ഇൻപുട്ടുകൾ ഉണ്ട്, അവ ലാൻഡിംഗ് ഗിയർ, എയർബ്രേക്കുകൾ, കാനോപ്പി സ്വിച്ച്, ടെയിൽ ഡോളി സ്വിച്ച്, ഇവന്റ് ഇൻപുട്ട് എന്നിവയുടെ അവസ്ഥ സൂചിപ്പിക്കാൻ സജ്ജമാക്കാൻ കഴിയും. വയറിംഗ് അദ്ധ്യായം 9.6.1.5-ൽ വിവരിച്ചിരിക്കുന്നു. എല്ലാ ഇൻപുട്ടുകളും ആന്തരിക പുൾഅപ്പ് റെസിസ്റ്ററുള്ള തുറന്ന കളക്ടറാണ്. ഇൻപുട്ട് തുറന്നിട്ടാൽ അത് ചുവപ്പ് (ഫ്ലേസ്) അവസ്ഥയെ സൂചിപ്പിക്കും, നിങ്ങൾ അത് ഗ്രൗണ്ട് ചെയ്താൽ അത് പച്ച (ട്രൂ) അവസ്ഥയെ സൂചിപ്പിക്കും.
5.6.11.1.4 ഉദാampഇൻപുട്ട് ട്രിഗർ ചെയ്ത മുന്നറിയിപ്പുകളുടെ le:
- ഗിയർ മുന്നറിയിപ്പുകൾ
ഗിയർ പരിശോധിക്കുക: SxHAWK-യിലെ ഏതെങ്കിലും ഇൻപുട്ടുകളിലേക്ക് ലാൻഡിംഗ് ഗിയർ വയർ ചെയ്തിട്ടില്ലെങ്കിൽ, പറന്നുയർന്ന് 5 മിനിറ്റിനുശേഷം ഈ മുന്നറിയിപ്പ് ലഭിക്കും.
ലാൻഡിംഗ് ഗിയർ പരിശോധിക്കുക: പറക്കുന്നതിനിടയിൽ, സജ്ജരാകുക, എയർ ബ്രേക്കുകൾ തുറന്നു. - എയർബ്രേക്കുകൾക്കുള്ള മുന്നറിയിപ്പുകൾ
എയർബ്രേക്കുകൾ പരിശോധിക്കുക: നിങ്ങൾ നിലത്താണെങ്കിൽ, വേഗത 0, ഗിയർ ഡൗൺ, എയർബ്രേക്കുകൾ തുറക്കുക. ഈ മുന്നറിയിപ്പ് ഓരോ 30 സെക്കൻഡിലും ആവർത്തിക്കുന്നു.
മുന്നറിയിപ്പ് എയർബ്രേക്കുകൾ, മുന്നറിയിപ്പ് എയർബ്രേക്കുകൾ...: ആക്സിലറേഷൻ സമയത്ത്, ഗിയർ ഡൗൺ* ചെയ്യുമ്പോൾ, എയർബ്രേക്കുകൾ തുറന്നു.
എയർബ്രേക്കുകൾ പരിശോധിക്കുക: വേഗത, എയർബ്രേക്കുകൾ തുറന്നു.
![]() പിൻ DB15 കണക്ടറിൽ ഇൻപുട്ട് പിന്നുകൾ ലഭ്യമാണ്, പക്ഷേ അവ വയർ ചെയ്തിട്ടില്ല.
പിൻ DB15 കണക്ടറിൽ ഇൻപുട്ട് പിന്നുകൾ ലഭ്യമാണ്, പക്ഷേ അവ വയർ ചെയ്തിട്ടില്ല.
![]() ഗ്രൗണ്ടിലേക്ക് ചുരുക്കുമ്പോൾ ഇൻപുട്ട് സജീവമാണ്.
ഗ്രൗണ്ടിലേക്ക് ചുരുക്കുമ്പോൾ ഇൻപുട്ട് സജീവമാണ്.
5.6.11.2 ആശയവിനിമയ സജ്ജീകരണം
ഒരു GPS/FLARM ഉറവിടത്തിലേക്കും PDAയിലേക്കും ബന്ധിപ്പിക്കുന്നതിനായി SxHAWK-യുടെ പിൻഭാഗത്തുള്ള രണ്ട് പോർട്ടുകൾ കോൺഫിഗർ ചെയ്യാൻ ഇത് ഉപയോഗിക്കുന്നു. ഓരോ പോർട്ടും വെവ്വേറെ കോൺഫിഗർ ചെയ്യാൻ കഴിയും. 
5.6.11.2.1 നേരിട്ടുള്ള ലിങ്ക്: PDA-FLARM ലിങ്ക്
നിങ്ങളുടെ PDA ഉപകരണം GPS, PDA പോർട്ടുകൾക്കിടയിൽ DIRECT LINK-ലേക്ക് ഓട്ടോമാറ്റിക്കായി മാറുന്നതിനെ പിന്തുണയ്ക്കുന്നില്ലെങ്കിൽ, ഒരു മാനുവൽ DIRECT LINK മെനു ഉണ്ട്. ഉപയോക്താവിന് PDAFLARM അല്ലെങ്കിൽ BT-FLARM എന്നിവയിൽ ഒന്ന് തിരഞ്ഞെടുക്കാം.
ഓട്ടോമാറ്റിക് ബോഡ് നിരക്ക് പ്രാപ്തമാക്കുമ്പോൾ, FLARM പോർട്ടിൽ സാധുവായ ഡാറ്റ ലഭിക്കുന്നതിന് LXNAV SxHAWK എല്ലാ വേഗതകളിലും യാന്ത്രികമായി തിരയും. SxHAWK ന് സാധുവായ ഒരു NMEA വാക്യം ലഭിക്കുമ്പോൾ, അത് ആ ബോഡ് നിരക്കിൽ ലോക്ക് ചെയ്യുകയും തിരയൽ നിർത്തുകയും ചെയ്യും.
![]() PDA-GPS ലിങ്ക് സാധാരണയായി ഓട്ടോമാറ്റിക് ആണ്, എന്നാൽ ചില PDA സോഫ്റ്റ്വെയറുകൾക്ക് മാനുവൽ ക്രമീകരണങ്ങൾ ആവശ്യമാണ്.
PDA-GPS ലിങ്ക് സാധാരണയായി ഓട്ടോമാറ്റിക് ആണ്, എന്നാൽ ചില PDA സോഫ്റ്റ്വെയറുകൾക്ക് മാനുവൽ ക്രമീകരണങ്ങൾ ആവശ്യമാണ്.
![]() SxHAWK, FLARM എക്സ്റ്റൻഷൻ പോർട്ടുമായി ബന്ധിപ്പിക്കുന്നത് ആവശ്യത്തിന് ഡാറ്റ അയയ്ക്കാതിരിക്കാൻ ഇടയാക്കും. ദയവായി SxHAWK, പ്രധാന FLARM പോർട്ടുമായി ബന്ധിപ്പിക്കുക.
SxHAWK, FLARM എക്സ്റ്റൻഷൻ പോർട്ടുമായി ബന്ധിപ്പിക്കുന്നത് ആവശ്യത്തിന് ഡാറ്റ അയയ്ക്കാതിരിക്കാൻ ഇടയാക്കും. ദയവായി SxHAWK, പ്രധാന FLARM പോർട്ടുമായി ബന്ധിപ്പിക്കുക.
5.6.11.2.2 BT-FLARM ലിങ്ക്
ബ്ലൂടൂത്ത് വഴി ബന്ധിപ്പിച്ചിരിക്കുന്ന ഒരു PNA ഉപകരണത്തെ FLARM പോർട്ടുമായി (FLARM/Nano) ബന്ധിപ്പിച്ചിരിക്കുന്ന ഒരു ഉപകരണവുമായി നേരിട്ട് ആശയവിനിമയം നടത്താൻ അനുവദിക്കുന്നു.
5.6.11.2.3 PDA ബൗഡ് നിരക്ക്
PDA പോർട്ടിന്റെ ബോഡ് നിരക്ക് സജ്ജമാക്കുക.
PDA പോർട്ടിലെ ബോഡ് നിരക്ക് PDA ഉപകരണത്തിലേതിന് സമാനമായി സജ്ജമാക്കണം, അല്ലാത്തപക്ഷം SxHAWK ഉം PDA ഉം പരസ്പരം ആശയവിനിമയം നടത്തുകയില്ല.
PDA-യിലെ ബോഡ് നിരക്ക് GPS പോർട്ടിലെ ക്രമീകരണത്തേക്കാൾ കുറവായിരിക്കരുത്.
5.6.11.2.4 GPS (SxHAWK-FLARM പോർട്ട്) ബൗഡ് നിരക്ക്
GPS/FLARM പോർട്ടിന്റെ ബോഡ് നിരക്ക് സജ്ജമാക്കുക.
![]() LXNAV SxHAWK-യിൽ നിന്ന് മികച്ച പ്രകടനം ലഭിക്കുന്നതിന്, രണ്ട് ബോഡ് നിരക്കുകളും കഴിയുന്നത്ര ഉയർന്ന നിലയിൽ സജ്ജമാക്കാൻ ശുപാർശ ചെയ്യുന്നു.
LXNAV SxHAWK-യിൽ നിന്ന് മികച്ച പ്രകടനം ലഭിക്കുന്നതിന്, രണ്ട് ബോഡ് നിരക്കുകളും കഴിയുന്നത്ര ഉയർന്ന നിലയിൽ സജ്ജമാക്കാൻ ശുപാർശ ചെയ്യുന്നു.
5.6.11.2.5 ബ്ലൂടൂത്ത്
ഇന്റേണൽ ബ്ലൂടൂത്ത് മൊഡ്യൂൾ ഓൺ/ഓഫ് ചെയ്യുന്നതിന് ഈ ക്രമീകരണം ടോഗിൾ ചെയ്യുക. ബിടി മൊഡ്യൂൾ ഓഫാക്കിയാൽ വൈദ്യുതി ഉപഭോഗം കുറയുകയും ഇന്റേണൽ ബാറ്ററിയുടെ പ്രവർത്തന സമയം വർദ്ധിക്കുകയും ചെയ്യും.
![]() ബ്ലൂടൂത്ത് പ്രവർത്തനത്തിന്, GPS-ലെ ബോഡ് നിരക്ക് 9600bps-ൽ കുറവായിരിക്കരുത്.
ബ്ലൂടൂത്ത് പ്രവർത്തനത്തിന്, GPS-ലെ ബോഡ് നിരക്ക് 9600bps-ൽ കുറവായിരിക്കരുത്.
5.6.11.2.6 FLARM പോർട്ടിലേക്ക് ഡിക്ലറേഷൻ അയയ്ക്കുക
ഇത് ഒരു ബാഹ്യ ഫ്ലാം മൊഡ്യൂളിലേക്ക് സ്വയമേവ ഒരു പ്രഖ്യാപനം അയയ്ക്കും.
5.6.11.2.7 NMEA ഔട്ട്പുട്ട്
PDA പോർട്ടിലും BT യിലും NMEA ഔട്ട്പുട്ട് പ്രവർത്തനക്ഷമമാക്കാനോ പ്രവർത്തനരഹിതമാക്കാനോ കഴിയും. നിങ്ങൾ ഒരു PDA പോർട്ട് ഉപയോഗിക്കുന്നില്ലെങ്കിൽ മികച്ച പ്രകടനം ലഭിക്കുന്നതിന് ഈ ക്രമീകരണം പ്രവർത്തനരഹിതമാക്കണം.
![]() ബ്ലൂടൂത്ത് ഉപയോഗിക്കുന്നതിന് മുമ്പ്, ഒരു ബ്ലൂടൂത്ത് ആന്റിന യൂണിറ്റുമായി ബന്ധിപ്പിച്ചിരിക്കണം.
ബ്ലൂടൂത്ത് ഉപയോഗിക്കുന്നതിന് മുമ്പ്, ഒരു ബ്ലൂടൂത്ത് ആന്റിന യൂണിറ്റുമായി ബന്ധിപ്പിച്ചിരിക്കണം.
![]() ബ്ലൂടൂത്ത് പാസ്വേഡ് 1234 അല്ലെങ്കിൽ 0000 ആണ്.
ബ്ലൂടൂത്ത് പാസ്വേഡ് 1234 അല്ലെങ്കിൽ 0000 ആണ്.
ഈ ബ്ലൂടൂത്ത് iOS, Android എന്നിവയുമായി പൊരുത്തപ്പെടുന്നു.
5.6.11.2.8 PDA നിയന്ത്രിക്കുന്ന ബീപ്പുകൾ
ഒരു PDA SxHAWK-യുമായി ബന്ധിപ്പിച്ചിട്ടുണ്ടെങ്കിൽ, PDA-യ്ക്ക് SxHAWK-യിലേക്ക് ഒരു ബീപ്പ് കമാൻഡ് അയയ്ക്കാൻ കഴിയും. ഈ സവിശേഷത പ്രാപ്തമാക്കിയിട്ടുണ്ടെങ്കിൽ, PDA-യുടെ അഭ്യർത്ഥനപ്രകാരം SxHAWK ബീപ്പ് ചെയ്യും.
5.6.11.3 ബാറ്ററി സജ്ജീകരണം
SxHAWK യൂണിറ്റുകൾക്ക് രണ്ട് ഓപ്ഷനുകൾ പട്ടികപ്പെടുത്തിയിട്ടുണ്ട്:
- ബാഹ്യ ബാറ്ററി
- ആന്തരിക ബാറ്ററി

5.6.11.3.1 ബാഹ്യ ബാറ്ററി കെമിസ്ട്രി
ശരിയായ വോള്യം ലഭിക്കുന്നതിന് ഉപയോക്താവ് ബാറ്ററി ലിസ്റ്റിൽ നിന്ന് ബാറ്ററി തിരഞ്ഞെടുക്കണംtagഇ അളവ്.
ഇന്ന് ഗ്ലൈഡറുകളിൽ ഉപയോഗിക്കുന്ന ബാറ്ററികൾ പഴയ രീതിയിലുള്ള ലെഡ് ആസിഡ് ബാറ്ററികൾ മാത്രമല്ല, ലിഥിയം അയൺ (LiIon), ലിഥിയം അയൺ ഫോസ്ഫേറ്റ് (LiFePo) എന്നിവയും ലഭ്യമാണ്.
ഓരോ ബാറ്ററി തരത്തിനും വ്യത്യസ്ത പവർ ഡെലിവറി കർവ് ഉണ്ട്, ഇപ്പോൾ കുറഞ്ഞ ബാറ്ററിയും ഉയർന്ന ബാറ്ററി മുന്നറിയിപ്പുകളും ക്രമീകരിക്കാൻ സാധിക്കും.  ലിസ്റ്റിൽ നിന്ന് ബാറ്ററി തിരഞ്ഞെടുക്കുക, പൂർണ്ണ വോളിയത്തിനായി നിർദ്ദേശിച്ച ബാറ്ററി ക്രമീകരണങ്ങളുള്ള ഒരു ഡ്രോപ്പ്-ഡൗൺ ലിസ്റ്റ് നിങ്ങൾക്ക് നൽകുന്നുtagഇ, കുറഞ്ഞ ബാറ്ററി വോളിയംtagഇ, ശൂന്യമായ വാല്യംtagഇ പ്രീ-സെറ്റ് ആയി. ഇവയിലൊന്ന് തിരഞ്ഞെടുക്കുന്നത് ഇനിപ്പറയുന്ന ബോക്സുകളിൽ മൂല്യങ്ങൾ സജ്ജമാക്കും.
ലിസ്റ്റിൽ നിന്ന് ബാറ്ററി തിരഞ്ഞെടുക്കുക, പൂർണ്ണ വോളിയത്തിനായി നിർദ്ദേശിച്ച ബാറ്ററി ക്രമീകരണങ്ങളുള്ള ഒരു ഡ്രോപ്പ്-ഡൗൺ ലിസ്റ്റ് നിങ്ങൾക്ക് നൽകുന്നുtagഇ, കുറഞ്ഞ ബാറ്ററി വോളിയംtagഇ, ശൂന്യമായ വാല്യംtagഇ പ്രീ-സെറ്റ് ആയി. ഇവയിലൊന്ന് തിരഞ്ഞെടുക്കുന്നത് ഇനിപ്പറയുന്ന ബോക്സുകളിൽ മൂല്യങ്ങൾ സജ്ജമാക്കും.  പകരമായി, നിങ്ങൾക്ക് പൂർണ്ണ വോളിയം സ്വമേധയാ മാറ്റാംtagഇ, കുറഞ്ഞ ബാറ്ററി വോളിയംtagഇ, ശൂന്യമായ വാല്യംtagഇ നിങ്ങളുടെ ബാറ്ററി തരം ലിസ്റ്റുചെയ്തിട്ടില്ലെങ്കിൽ. ആ ക്രമീകരണങ്ങൾ ബാറ്ററി ലെവൽ ഐക്കണിനെയും കുറഞ്ഞ ബാറ്ററി മുന്നറിയിപ്പിനെയും സ്വാധീനിക്കും.
പകരമായി, നിങ്ങൾക്ക് പൂർണ്ണ വോളിയം സ്വമേധയാ മാറ്റാംtagഇ, കുറഞ്ഞ ബാറ്ററി വോളിയംtagഇ, ശൂന്യമായ വാല്യംtagഇ നിങ്ങളുടെ ബാറ്ററി തരം ലിസ്റ്റുചെയ്തിട്ടില്ലെങ്കിൽ. ആ ക്രമീകരണങ്ങൾ ബാറ്ററി ലെവൽ ഐക്കണിനെയും കുറഞ്ഞ ബാറ്ററി മുന്നറിയിപ്പിനെയും സ്വാധീനിക്കും.
5.6.11.3.2 ആന്തരിക ബാറ്ററി
SxHAWK യൂണിറ്റുകളിൽ ഒരു ബിൽറ്റ്-ഇൻ ഇന്റേണൽ ബാറ്ററിയും ഉണ്ട്, അവിടെ നിങ്ങൾക്ക് ഈ ബാറ്ററിയുടെ ആരോഗ്യവും ക്രമീകരണങ്ങളും പരിശോധിക്കാം. 
5.6.11.3.3 ബാറ്ററിയുടെ ആരോഗ്യം
ഇത് ആന്തരിക ബാറ്ററിയുടെ ആരോഗ്യവും അതിന്റെ ചാർജ് നിലയും കാണിക്കുന്നു. ബാഹ്യ പവറുമായി കണക്റ്റ് ചെയ്തിരിക്കുമ്പോൾ ചാർജ് ലെവൽ, ബാറ്ററി നിറഞ്ഞില്ലെങ്കിലും ചാർജ് ചെയ്യുമ്പോൾ 100% സൂചിപ്പിക്കും. ബാറ്ററി നിറഞ്ഞാൽ അത് "FULL" എന്ന് പ്രദർശിപ്പിക്കും. 
5.6.11.3.4 ആന്തരിക ബാറ്ററിയുടെ ക്രമീകരണങ്ങൾ 
ഇനിപ്പറയുന്ന മൂല്യങ്ങൾ സജ്ജമാക്കാൻ കഴിയും:
- ബാറ്ററി സംരക്ഷിക്കുക = ബാറ്ററി 75% ൽ താഴെയായി കുറയുന്നതുവരെ ചാർജർ സജീവമാകില്ല.
- പൂർണ്ണമായും ചാർജ് ചെയ്യുക = ഇത് പരിശോധിച്ചില്ലെങ്കിൽ, ബാറ്ററി ഏകദേശം 90% വരെ ചാർജ് ചെയ്യപ്പെടും (ചാർജിംഗ് കറന്റ് 0.45A യിൽ താഴെയാകുമ്പോൾ).
- ചാർജർ മോഡ് = ഓൺ / ഓഫ് അല്ലെങ്കിൽ ഓട്ടോമാറ്റിക് ആയി സജ്ജമാക്കാം.
ചാർജിംഗ് കറന്റ് 10mA-ൽ താഴെയാകുമ്പോൾ ഓട്ടോമാറ്റിക് മോഡ് ചാർജ് ചെയ്യുന്നത് നിർത്തും. അപ്പോൾ ചാർജ് സ്റ്റാറ്റസ് FULL എന്ന് സൂചിപ്പിക്കും. ബാറ്ററി സംരക്ഷിക്കൽ പ്രവർത്തനക്ഷമമാക്കിയിട്ടുണ്ടെങ്കിൽ, ബാറ്ററി 75%-ൽ താഴെയായിരിക്കുമ്പോൾ മാത്രമേ ചാർജ് ചെയ്യപ്പെടുകയുള്ളൂ, അത് പൂർണ്ണമായി അല്ലെങ്കിൽ 90% ആയി ചാർജ് ചെയ്യപ്പെടും, ഇത് ക്രമീകരണത്തെ ആശ്രയിച്ചിരിക്കുന്നു.
![]() റിമോട്ട് സ്റ്റിക്ക്, FLARM, PDA... തുടങ്ങിയ പെരിഫറൽ ഉപകരണങ്ങളിലേക്ക് ആന്തരിക ബാറ്ററി പവർ നൽകില്ല.
റിമോട്ട് സ്റ്റിക്ക്, FLARM, PDA... തുടങ്ങിയ പെരിഫറൽ ഉപകരണങ്ങളിലേക്ക് ആന്തരിക ബാറ്ററി പവർ നൽകില്ല.
![]() ബാഹ്യ വൈദ്യുതി ലഭ്യമായിരിക്കുകയും യൂണിറ്റ് ഓണായിരിക്കുകയും ചെയ്യുമ്പോൾ മാത്രമേ SxHAWK ആന്തരിക ബാറ്ററി ചാർജ് ചെയ്യുകയുള്ളൂ.
ബാഹ്യ വൈദ്യുതി ലഭ്യമായിരിക്കുകയും യൂണിറ്റ് ഓണായിരിക്കുകയും ചെയ്യുമ്പോൾ മാത്രമേ SxHAWK ആന്തരിക ബാറ്ററി ചാർജ് ചെയ്യുകയുള്ളൂ.
5.6.11.3.5 ബാറ്ററി കാലിബ്രേഷൻ
ചിലപ്പോൾ ആന്തരിക ബാറ്ററി സ്വയം കാലിബ്രേറ്റ് ചെയ്യേണ്ടതുണ്ട്. പൂർണ്ണ ഡിസ്ചാർജ് സൈക്കിൾ ഉപയോഗിച്ച് ബാറ്ററിയുടെ പുതിയ കാലിബ്രേഷൻ നടത്താം.
പ്രക്രിയ ആരംഭിക്കാൻ, ബാറ്ററി FULL ആയി ചാർജ് ചെയ്യുക. FULL എന്ന് കാണുമ്പോൾ, ബാഹ്യ പവർ നീക്കം ചെയ്ത്, ആന്തരിക ബാറ്ററി ശൂന്യമാകുന്നതുവരെ പ്രവർത്തിപ്പിക്കാൻ അനുവദിക്കുക.
ബാറ്ററി കാലിബ്രേറ്റ് ചെയ്തിട്ടില്ലെങ്കിൽ (ചാർജ് അവസ്ഥ) SOC % ന്റെ സൂചന തെറ്റായിരിക്കാം.
എന്നിരുന്നാലും എല്ലാ സാഹചര്യത്തിലും പൂർണ്ണ ചാർജ് അവസ്ഥയിൽ മൂല്യം എല്ലായ്പ്പോഴും ശരിയാണ്.
5.6.11.4 റിമോട്ട് സ്റ്റിക്ക്
SxHAWK യുടെ പ്രധാന വയറിംഗായ CAN ബസുമായും റിമോട്ട് സ്റ്റിക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്നു.
രണ്ട് സീറ്റുള്ള ഉപകരണമാണെങ്കിൽ, രണ്ട് റിമോട്ട് സ്റ്റിക്കുകൾ ഉണ്ടായിരിക്കാൻ സാധ്യതയുള്ളതിനാൽ, ആ ഉപകരണം രജിസ്റ്റർ ചെയ്തിരിക്കണം; ഒന്ന് പ്രധാന ഉപകരണത്തിലും മറ്റൊന്ന് രണ്ടാമത്തെ സീറ്റ് ഉപകരണത്തിലും രജിസ്റ്റർ ചെയ്തിരിക്കണം.
റിമോട്ട് സ്റ്റിക്ക് രജിസ്റ്റർ ചെയ്യുന്നത് ഇനിപ്പറയുന്ന രീതിയിൽ ചെയ്യാം:
റിമോട്ട് സ്റ്റിക്കിലെ ഏതെങ്കിലും ബട്ടൺ അമർത്തുക - CAN BUS-ൽ റിമോട്ട് സ്റ്റിക്കിന്റെ സാന്നിധ്യം SxHAWK കണ്ടെത്തും.
സെറ്റപ്പ്->ഹാർഡ്വെയർ->റിമോട്ട് സ്റ്റിക്ക് എന്നതിലേക്ക് പോകുക.
റിമോട്ട് സ്റ്റിക്ക് സ്ഥിരീകരിക്കാൻ, നിങ്ങൾ റിമോട്ട് സ്റ്റിക്കിലെ ശരി ബട്ടൺ അമർത്തണം.
SxHAWKD റിപ്പീറ്റർ യൂണിറ്റിനുള്ള രണ്ടാമത്തെ റിമോട്ടിനും ഈ പ്രക്രിയ സമാനമാണ്. റിപ്പീറ്റർ യൂണിറ്റ് രജിസ്റ്റർ ചെയ്യുന്ന സമയത്ത്, ഫ്രണ്ട് യൂണിറ്റ് രജിസ്റ്റർ മോഡിലല്ലെന്ന് ഉറപ്പാക്കുക, അല്ലാത്തപക്ഷം രണ്ട് യൂണിറ്റുകളും ഒരേ റിമോട്ട് സ്റ്റിക്ക് കേൾക്കും.
![]() SxHAWK-യിൽ നിന്ന് വ്യത്യസ്തമായ ആശയവിനിമയമാണ് റിമോട്ട് സ്റ്റിക്ക് ഉപയോഗിക്കുന്നതെങ്കിലും, ഒരു റിമോട്ട് സ്റ്റിക്ക് ഓർഡർ ചെയ്യുമ്പോൾ ഉപയോക്താവ് അത് എന്ത് ഉദ്ദേശ്യത്തിനായി ഉപയോഗിക്കണമെന്ന് വ്യക്തമാക്കണം. SxHAWK ഉപകരണങ്ങളുടെ കാര്യത്തിൽ, റിമോട്ട് CAN എന്ന് പേരുള്ള ഒരു അഡാപ്റ്റർ ഉൾപ്പെടുത്തും. ഒരു വശത്ത് ഇത് ഒരു DB9 കണക്റ്റർ വഴി CAN ബസുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു, മറുവശത്ത് റിമോട്ട് സ്റ്റിക്കിന്റെ ഉചിതമായ വയറുകളുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു. സ്പ്രിംഗ് കോൺടാക്റ്റുകളിലെ വർണ്ണ അടയാളങ്ങൾ പിന്തുടരുക.
SxHAWK-യിൽ നിന്ന് വ്യത്യസ്തമായ ആശയവിനിമയമാണ് റിമോട്ട് സ്റ്റിക്ക് ഉപയോഗിക്കുന്നതെങ്കിലും, ഒരു റിമോട്ട് സ്റ്റിക്ക് ഓർഡർ ചെയ്യുമ്പോൾ ഉപയോക്താവ് അത് എന്ത് ഉദ്ദേശ്യത്തിനായി ഉപയോഗിക്കണമെന്ന് വ്യക്തമാക്കണം. SxHAWK ഉപകരണങ്ങളുടെ കാര്യത്തിൽ, റിമോട്ട് CAN എന്ന് പേരുള്ള ഒരു അഡാപ്റ്റർ ഉൾപ്പെടുത്തും. ഒരു വശത്ത് ഇത് ഒരു DB9 കണക്റ്റർ വഴി CAN ബസുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു, മറുവശത്ത് റിമോട്ട് സ്റ്റിക്കിന്റെ ഉചിതമായ വയറുകളുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു. സ്പ്രിംഗ് കോൺടാക്റ്റുകളിലെ വർണ്ണ അടയാളങ്ങൾ പിന്തുടരുക.
![]() CAN ബസ് എപ്പോഴും വൈദ്യുതിയിലാണ്, അതിനാൽ റിമോട്ട് സ്റ്റിക്കും വൈദ്യുതിയിലാണ്. പറക്കലിന് ശേഷം ബാറ്ററികൾ ഡിസ്ചാർജ് ചെയ്യുന്നത് തടയാൻ ബാറ്ററികൾ വിച്ഛേദിക്കുകയോ മാസ്റ്റർ സ്വിച്ച് ഓഫ് ചെയ്യുകയോ ചെയ്യുക.
CAN ബസ് എപ്പോഴും വൈദ്യുതിയിലാണ്, അതിനാൽ റിമോട്ട് സ്റ്റിക്കും വൈദ്യുതിയിലാണ്. പറക്കലിന് ശേഷം ബാറ്ററികൾ ഡിസ്ചാർജ് ചെയ്യുന്നത് തടയാൻ ബാറ്ററികൾ വിച്ഛേദിക്കുകയോ മാസ്റ്റർ സ്വിച്ച് ഓഫ് ചെയ്യുകയോ ചെയ്യുക.
![]() സിസ്റ്റം ബാഹ്യ 12V പവറിൽ പ്രവർത്തിക്കുമ്പോൾ മാത്രമേ റിമോട്ട് സ്റ്റിക്ക് തിരിച്ചറിയാൻ കഴിയൂ. SxHAWK ആന്തരിക ബാറ്ററിയിൽ മാത്രമേ പ്രവർത്തിക്കുന്നുള്ളൂവെങ്കിൽ അത് പ്രവർത്തിക്കില്ല.
സിസ്റ്റം ബാഹ്യ 12V പവറിൽ പ്രവർത്തിക്കുമ്പോൾ മാത്രമേ റിമോട്ട് സ്റ്റിക്ക് തിരിച്ചറിയാൻ കഴിയൂ. SxHAWK ആന്തരിക ബാറ്ററിയിൽ മാത്രമേ പ്രവർത്തിക്കുന്നുള്ളൂവെങ്കിൽ അത് പ്രവർത്തിക്കില്ല.
5.6.11.5 ഫ്ലാപ്പുകൾ
ഒരു ഫ്ലാപ്പ് സെൻസർ ഇൻസ്റ്റാൾ ചെയ്യുമ്പോൾ, ഫ്ലാപ്പുകളുടെ സ്ഥാനം സജ്ജമാക്കാൻ ഈ മെനു ഉപയോഗിക്കുക. SC/Vario അറ്റ് ഓപ്ഷൻ ടോഗിൾ ചെയ്യുന്നത് എപ്പോൾ (ഫ്ലാപ്പ് പൊസിഷൻ അനുസരിച്ച്) ഇൻസ്ട്രുമെന്റ് SC, വേരിയോ മോഡുകൾക്കിടയിൽ മാറുമെന്ന് തിരഞ്ഞെടുക്കാൻ നിങ്ങളെ അനുവദിക്കുന്നു. ആവശ്യമുള്ള ഫ്ലാപ്പ് സ്ഥാനം തിരഞ്ഞെടുക്കാൻ പേജ് സെലക്ടർ ഉപയോഗിക്കുക. സ്ഥാനം സജ്ജീകരിക്കാൻ SET അമർത്തുക. എല്ലാ ഫ്ലാപ്പ് സ്ഥാനങ്ങൾക്കും ഈ നടപടിക്രമം ആവർത്തിക്കുക.  When all flap positions are set, a green dot will be displayed with current flap position. If flap labels are not set yet, press EDIT to name the labels. Flap labels must be entered with increasing speed range. It is recommended that flaps labels are set together with the speed range in the Polar and Glider setup. It is also possible to toggle between cruise and climb mode using the flap sensor.
When all flap positions are set, a green dot will be displayed with current flap position. If flap labels are not set yet, press EDIT to name the labels. Flap labels must be entered with increasing speed range. It is recommended that flaps labels are set together with the speed range in the Polar and Glider setup. It is also possible to toggle between cruise and climb mode using the flap sensor.  5.6.11.6 എഎച്ച്ആർഎസ്
5.6.11.6 എഎച്ച്ആർഎസ്
ഇൻസ്റ്റലേഷൻ പിശകുകൾക്കായി AHRS കാലിബ്രേറ്റ് ചെയ്യുന്നതിന് ഈ മെനു ഉപയോഗിക്കുക.
നിങ്ങളുടെ ഗ്ലൈഡർ ലെവൽ ചെയ്ത സ്ഥാനത്ത് വയ്ക്കുക, ലെവൽ തിരഞ്ഞെടുക്കുക, അത് സിസ്റ്റം പിച്ച് ഓഫ്സെറ്റ് സജ്ജമാക്കുകയും നിലവിലെ പിച്ച് 0° ആയി സജ്ജീകരിക്കുകയും ചെയ്യും.
നിങ്ങൾക്ക് ഉപയോക്തൃ പിച്ച് ഓഫ്സെറ്റ് പരിഷ്ക്കരിക്കാനും കഴിയും.
റീസെറ്റ് ഓഫാക്കുക. ബട്ടൺ സിസ്റ്റം പിച്ച് ഓഫ്സെറ്റും ഉപയോക്തൃ പിച്ച് ഓഫ്സെറ്റും പൂജ്യത്തിലേക്ക് റീസെറ്റ് ചെയ്യും (ഫാക്ടറി ഡിഫോൾട്ട്).
അലൈൻ ഗൈറോകൾ ഗൈറോസ്കോപ്പുകളുടെ ഡ്രിഫ്റ്റ് ക്രമീകരിക്കും, ഇത് പറക്കലിനിടെ ചെറിയ പിച്ചും റോൾ ഓഫ്സെറ്റും പരിഹരിക്കും.
ഗൈറോകൾ പുനഃസജ്ജമാക്കുന്നത് എല്ലാ ഉപയോക്തൃ ഗൈറോ അലൈൻമെന്റുകളെയും ഫാക്ടറി ഡിഫോൾട്ടുകളിലേക്ക് തിരികെ സജ്ജമാക്കും.
![]() ഫ്ലൈറ്റ് സമയത്ത് യൂസർ പിച്ച് ഓഫ്സെറ്റ് ലോവർ റോട്ടറി നോബ് വഴി ക്രമീകരിക്കാം.
ഫ്ലൈറ്റ് സമയത്ത് യൂസർ പിച്ച് ഓഫ്സെറ്റ് ലോവർ റോട്ടറി നോബ് വഴി ക്രമീകരിക്കാം.
ഈ മെനുവിൽ AHRS പാസ്വേഡ് ഉപയോഗിച്ചും ലോക്ക് ചെയ്യാൻ കഴിയും. 
![]() മത്സര സംഘാടകർക്ക് AHRS ലോക്ക് ചെയ്ത ഓപ്ഷൻ ഉപയോഗിക്കാം. അവർക്ക് സ്വന്തം പാസ്വേഡ് ഉപയോഗിച്ച് ഒരു AHRS ലോക്ക് ചെയ്യാനോ അൺലോക്ക് ചെയ്യാനോ കഴിയും.
മത്സര സംഘാടകർക്ക് AHRS ലോക്ക് ചെയ്ത ഓപ്ഷൻ ഉപയോഗിക്കാം. അവർക്ക് സ്വന്തം പാസ്വേഡ് ഉപയോഗിച്ച് ഒരു AHRS ലോക്ക് ചെയ്യാനോ അൺലോക്ക് ചെയ്യാനോ കഴിയും.
പാസ്വേഡ് ഉപയോഗിച്ച് AHRS ലോക്ക് ചെയ്തിരിക്കുകയും പാസ്വേഡ് മറന്നുപോകുകയും ചെയ്താൽ, ദയവായി 23519 എന്ന പാസ്വേഡ് ഉപയോഗിക്കുക.
5.6.11.7 CAN ബ്രിഡ്ജ്
CAN ബ്രിഡ്ജ് എന്നത് വെവ്വേറെ വിൽക്കുന്ന ഒരു ബാഹ്യ ഉപകരണമാണ്, ഇത് NMEA ഡാറ്റ ഔട്ട്പുട്ട് ചെയ്യുന്നതിനോ ഒരു റേഡിയോ അല്ലെങ്കിൽ ട്രാൻസ്പോണ്ടർ സിസ്റ്റത്തിലേക്ക് ബന്ധിപ്പിക്കുന്നതിനോ ഉപയോഗിക്കുന്നു.
![]() CAN ബ്രിഡ്ജിന്റെ വയറിംഗിനെക്കുറിച്ചുള്ള വിശദാംശങ്ങൾക്ക് ഇൻസ്റ്റാളേഷൻ മാനുവൽ കാണുക.
CAN ബ്രിഡ്ജിന്റെ വയറിംഗിനെക്കുറിച്ചുള്ള വിശദാംശങ്ങൾക്ക് ഇൻസ്റ്റാളേഷൻ മാനുവൽ കാണുക.
ഒരു CAN ബ്രിഡ്ജ് CAN BUS-ലേക്ക് പ്ലഗ് ഇൻ ചെയ്തുകഴിഞ്ഞാൽ, ഹാർഡ്വെയർ മെനുവിൽ Bridge SxHAWKxxx ദൃശ്യമാകും.  ആദ്യം, നിങ്ങൾ പ്രവർത്തനക്ഷമത നിർവചിക്കേണ്ടതുണ്ട്. നിങ്ങൾ തിരഞ്ഞെടുക്കുന്നതിനെ അടിസ്ഥാനമാക്കി ഡയലോഗ് മാറുകയും പ്രസക്തമായ ഇനങ്ങൾ പ്രദർശിപ്പിക്കുകയും ചെയ്യും.
ആദ്യം, നിങ്ങൾ പ്രവർത്തനക്ഷമത നിർവചിക്കേണ്ടതുണ്ട്. നിങ്ങൾ തിരഞ്ഞെടുക്കുന്നതിനെ അടിസ്ഥാനമാക്കി ഡയലോഗ് മാറുകയും പ്രസക്തമായ ഇനങ്ങൾ പ്രദർശിപ്പിക്കുകയും ചെയ്യും.
5.6.11.7.1 NMEA ഔട്ട്പുട്ട്  NMEA വാക്യങ്ങൾ കൈമാറാൻ NMEA ഔട്ട്പുട്ട് ഉപയോഗിക്കുന്നു. നിങ്ങൾക്ക് ആവശ്യമുള്ള NMEA വാക്യങ്ങൾ തിരഞ്ഞെടുത്ത് അവ കൈമാറ്റം ചെയ്യപ്പെടുന്ന ബാഡ് നിരക്ക് നിർവചിക്കാം.
NMEA വാക്യങ്ങൾ കൈമാറാൻ NMEA ഔട്ട്പുട്ട് ഉപയോഗിക്കുന്നു. നിങ്ങൾക്ക് ആവശ്യമുള്ള NMEA വാക്യങ്ങൾ തിരഞ്ഞെടുത്ത് അവ കൈമാറ്റം ചെയ്യപ്പെടുന്ന ബാഡ് നിരക്ക് നിർവചിക്കാം.
5.6.11.7.2 റേഡിയോ ബ്രിഡ്ജ്
പ്രധാന ഡിസ്പ്ലേ യൂണിറ്റിലൂടെ ഒരു റേഡിയോ പ്രവർത്തിപ്പിക്കുന്നതിനാണ് റേഡിയോ ബ്രിഡ്ജ് ഉപയോഗിക്കുന്നത്. ആദ്യം കണക്റ്റുചെയ്ത റേഡിയോയുടെ തരം തിരഞ്ഞെടുക്കണം. പിന്തുണയ്ക്കുന്ന ഉപകരണങ്ങളുടെ പട്ടികയ്ക്കായി ദയവായി ഇതിൽ കാണുന്ന CAN ബ്രിഡ്ജ് ഇൻസ്റ്റാളേഷൻ മാനുവൽ കാണുക. www.lxnav.com. 
![]() Becker AR6201 RS-232 കണക്ഷനുകളെ പിന്തുണയ്ക്കാത്തതിനാൽ ഇത് ഇതുവരെ പിന്തുണയ്ക്കുന്നില്ല.
Becker AR6201 RS-232 കണക്ഷനുകളെ പിന്തുണയ്ക്കാത്തതിനാൽ ഇത് ഇതുവരെ പിന്തുണയ്ക്കുന്നില്ല.
കോൺഫിഗറേഷൻ റേഡിയോ തിരഞ്ഞെടുക്കുന്നത് റേഡിയോ സജ്ജീകരണ മെനു തുറക്കും. ഈ മെനുവിൽ നിങ്ങൾക്ക് ടാർഗെറ്റ് മുന്നറിയിപ്പുകൾ കാണിക്കുക തിരഞ്ഞെടുക്കാം. ഇത് ഉപകരണത്തിൽ നിന്ന് ജനറേറ്റുചെയ്യുന്ന മുന്നറിയിപ്പുകൾ പ്രവർത്തനക്ഷമമാക്കും (ഉദാample: റേഡിയോ വളരെ ചൂടാണ്). ഇവിടെ നിങ്ങൾക്ക് സജീവവും സ്റ്റാൻഡ്ബൈ ഫ്രീക്വൻസിയും, വോളിയം, സ്ക്വെൽച്ച് വോളിയം, VOX വോളിയം എന്നിവയും സജ്ജീകരിക്കാം.
നിങ്ങളുടെ വിമാനത്താവളത്തിന് ഒരു ഫ്രീക്വൻസി ഉണ്ടെങ്കിൽ, എയർപോർട്ട് തിരഞ്ഞെടുത്തുകഴിഞ്ഞാൽ അത് റേഡിയോയിൽ സ്റ്റാൻഡ്ബൈ ഫ്രീക്വൻസിയായി സ്വയമേവ തിരഞ്ഞെടുക്കപ്പെടും. ഇത് പ്രവർത്തിക്കുന്നതിന് ഓട്ടോ സെലക്ട് ടാർഗെറ്റ് ഫ്രീക്വൻസി തിരഞ്ഞെടുക്കണം.
5.6.11.7.3 XPDR പാലം
XPDR ബ്രിഡ്ജിന് പ്രധാന യൂണിറ്റ് വഴി ട്രാൻസ്പോണ്ടർ പ്രവർത്തിപ്പിക്കാൻ കഴിയും. Config XPDR ക്ലിക്ക് ചെയ്ത് തുറക്കുന്ന XPDR സെറ്റപ്പ് മെനുവിൽ നിങ്ങൾക്ക് ICAO ഐഡന്റിറ്റി സജ്ജമാക്കാൻ കഴിയും. ട്രാൻസ്പോണ്ടറിൽ നിന്നുള്ള ലക്ഷ്യ മുന്നറിയിപ്പുകളും ഇതിന് കാണിക്കാൻ കഴിയും. പിന്തുണയ്ക്കുന്ന ഉപകരണങ്ങളുടെ പട്ടികയ്ക്ക് ദയവായി ഇതിൽ കാണുന്ന CAN Bridge ഇൻസ്റ്റാളേഷൻ മാനുവൽ കാണുക. www.lxnav.com. 
5.6.11.8 ഫ്ലാർം
ഒരു FLARM അല്ലെങ്കിൽ PowerFLARM സിസ്റ്റവുമായി ബന്ധിപ്പിച്ചിട്ടുണ്ടെങ്കിൽ അതിന്റെ വിവരങ്ങൾ, കോൺഫിഗറേഷൻ, എയർക്രാഫ്റ്റ് കോൺഫിഗറേഷൻ എന്നിവ ഈ മെനുവിൽ കാണാനോ കോൺഫിഗർ ചെയ്യാനോ കഴിയും. 
5.6.11.8.1 വിവരങ്ങൾ
ബാഹ്യ FLARM/PowerFLARM ഉപകരണത്തെക്കുറിച്ചുള്ള എല്ലാ വിവരങ്ങളും നിങ്ങൾക്ക് ഇവിടെ കാണാൻ കഴിയും. ലഭ്യമായ വിവരങ്ങൾ ഇവയാണ്:
- ഹാർഡ്വെയർ
- ഫേംവെയർ
- ഫ്ലാം ഐഡി
- സീരിയൽ നമ്പർ
- തടസ്സ ഡാറ്റാബേസ്
- തടസ്സ തീയതി
5.6.11.8.2 കോൺഫിഗറേഷൻ
FLARM/PCAS, ADSB തിരശ്ചീന, ലംബ ശ്രേണി പോലുള്ള FLARM കോൺഫിഗറേഷൻ ഇവിടെ സജ്ജമാക്കാൻ കഴിയും. മോഡ് C/Do not track മോഡ്, സ്റ്റെൽത്ത് മോഡ് എന്നിവ പ്രവർത്തനക്ഷമമാക്കുകയോ പ്രവർത്തനരഹിതമാക്കുകയോ ചെയ്യാം. സ്റ്റെൽത്ത് മോഡ് അർത്ഥമാക്കുന്നത് - പ്രവർത്തനക്ഷമമാക്കിയാൽ, മറ്റ് FLARM യൂണിറ്റുകൾക്ക് ഉയരം ലഭിക്കില്ല.
നിങ്ങളുടെ ഗ്ലൈഡറിനെക്കുറിച്ചുള്ള വേരിയൊ വിവരങ്ങളും (അവരുടെ ഉപകരണങ്ങളിൽ ഒരു ഡോട്ട് മാത്രമേ ദൃശ്യമാകൂ). കൂട്ടിയിടി മുന്നറിയിപ്പുകൾക്ക് ഈ മോഡിന് യാതൊരു സ്വാധീനവുമില്ല. ട്രാക്ക് ചെയ്യരുത് പ്രവർത്തനക്ഷമമാക്കിയത് OGN-ൽ ഒരു വസ്തുവിനെ കാണാൻ അനുവദിക്കില്ല.
5.6.11.8.3 എയർക്രാഫ്റ്റ് കോൺഫിഗറേഷൻ
ഗ്ലൈഡർ / ടൗ പ്ലെയിൻ / ഹെലികോപ്റ്റർ തുടങ്ങിയ വിമാന തരം ഇവിടെ സജ്ജീകരിക്കാം. കോൺഫിഗറിൽ കോൺഫിഗർ ചെയ്യേണ്ട കോഡാണ് ICAO വിലാസം file ഒരു ട്രാൻസ്പോണ്ടർ ഉണ്ടെങ്കിൽ.
ആ കോഡ് സജ്ജീകരിച്ചിട്ടില്ലെങ്കിൽ, കോക്ക്പിറ്റിലെ ഒരു ട്രാൻസ്പോണ്ടർ എല്ലായ്പ്പോഴും ഒരു FLARM ഒബ്ജക്റ്റായി കാണപ്പെടും.
5.6.11.8.4 ഫ്ലൈറ്റ് റെക്കോർഡർ
ഈ മെനുവിൽ FLARM-ന്റെ ഫ്ലൈറ്റ് റെക്കോർഡർ ക്രമീകരണങ്ങൾ പരിഷ്കരിക്കാവുന്നതാണ്.
5.6.11.8.5 ഫ്ലാർം പിശക് കോഡുകൾ
പിശക് കോഡുകൾ SxHAWK സ്ക്രീനിൽ പ്രദർശിപ്പിക്കും, ഫ്ലാം ഡിസ്പ്ലേകളിൽ പ്രദർശിപ്പിക്കും അല്ലെങ്കിൽ ഫ്ലാം ജനറേറ്റഡ് വഴി നിങ്ങൾക്ക് അത് വായിക്കാം. fileഫ്ലാമിന്റെ SD കാർഡിൽ s.
11 = ഫേംവെയർ കാലഹരണപ്പെട്ടു (സാധുവായ GPS വിവരങ്ങൾ ആവശ്യമാണ്, അതായത് പവർ-ഓൺ ചെയ്തതിന് ശേഷമുള്ള ആദ്യ മിനിറ്റിലോ മറ്റോ ലഭ്യമാകില്ല)
12 = ഫേംവെയർ അപ്ഡേറ്റ് പിശക്
21 = പവർ (ഉദാ. വാല്യംtage < 8V)
22 = UI പിശക്
23 = ഓഡിയോ പിശക്
24 = ADC പിശക്
25 = SD കാർഡ് പിശക്
26 = യുഎസ്ബി പിശക്
27 = LED പിശക്
28 = EEPROM പിശക്
29 = പൊതുവായ ഹാർഡ്വെയർ പിശക്
2A = ട്രാൻസ്പോണ്ടർ റിസീവർ മോഡ്-C/S/ADS-B ഉപയോഗിക്കാൻ കഴിയില്ല.
2B = EEPROM പിശക്
2C = GPIO പിശക്
31 = ജിപിഎസ് ആശയവിനിമയം
32 = ജിപിഎസ് മൊഡ്യൂളിന്റെ കോൺഫിഗറേഷൻ
33 = ജിപിഎസ് ആന്റിന
41 = ആർഎഫ് ആശയവിനിമയം
42 = അതേ റേഡിയോ ഐഡിയുള്ള മറ്റൊരു FLARM ഉപകരണം ലഭിക്കുന്നു. ബാധകമായ ഉപകരണത്തിനായുള്ള അലാറങ്ങൾ അടിച്ചമർത്തിയിരിക്കുന്നു.
43 = തെറ്റായ ICAO 24-ബിറ്റ് വിലാസം അല്ലെങ്കിൽ റേഡിയോ ഐഡി
51 = ആശയവിനിമയം
61 = ഫ്ലാഷ് മെമ്മറി
71 = പ്രഷർ സെൻസർ
81 = തടസ്സ ഡാറ്റാബേസ് (ഉദാ: തെറ്റാണ് file തരം)
82 = തടസ്സ ഡാറ്റാബേസ് കാലഹരണപ്പെട്ടു.
91 = ഫ്ലൈറ്റ് റെക്കോർഡർ
93 = എഞ്ചിൻ-ശബ്ദ റെക്കോർഡിംഗ് സാധ്യമല്ല.
A1 = കോൺഫിഗറേഷൻ പിശക്, ഉദാ: SD/USB-യിൽ നിന്ന് flarmcfg.txt വായിക്കുമ്പോൾ.
B1 = അസാധുവായ ഒബ്സ്റ്റക്കിൾ ഡാറ്റാബേസ് ലൈസൻസ് (ഉദാ: തെറ്റായ സീരിയൽ നമ്പർ)
B2 = അസാധുവായ IGC ഫീച്ചർ ലൈസൻസ്
B3 = അസാധുവായ AUD ഫീച്ചർ ലൈസൻസ്
B4 = അസാധുവായ ENL ഫീച്ചർ ലൈസൻസ്
B5 = അസാധുവായ RFB ഫീച്ചർ ലൈസൻസ്
B6 = അസാധുവായ TIS ഫീച്ചർ ലൈസൻസ്
100 = പൊതുവായ പിശക്
101 = ഫ്ലാഷ് File സിസ്റ്റം പിശക്
110 = ബാഹ്യ ഡിസ്പ്ലേയുടെ ഫേംവെയർ അപ്ഡേറ്റ് ചെയ്യുന്നതിൽ പരാജയം.
120 = ഉപകരണം നിയുക്ത പ്രദേശത്തിന് പുറത്താണ് പ്രവർത്തിക്കുന്നത്. ഉപകരണം പ്രവർത്തിക്കുന്നില്ല.
F1 = മറ്റുള്ളവ
5.6.12 പോളാർ ആൻഡ് ഗ്ലൈഡർ
5.6.12.1 പോളാർ
നിങ്ങളുടെ ഗ്ലൈഡറിന്റെ പോളാർക്കായി ഒരു കൂട്ടം പാരാമീറ്ററുകൾ ലോഡുചെയ്യാനും എഡിറ്റുചെയ്യാനും പോളാർ, ഗ്ലൈഡർ വിഭാഗം നിങ്ങളെ അനുവദിക്കുന്നു. ഏറ്റവും സാധാരണമായ ഗ്ലൈഡറുകളുടെ മുൻകൂട്ടി നിശ്ചയിച്ചിട്ടുള്ള ഒരു ലിസ്റ്റിൽ നിന്ന് നിങ്ങൾക്ക് തിരഞ്ഞെടുക്കാം അല്ലെങ്കിൽ നിങ്ങളുടെ സ്വന്തം പോളാർ സൃഷ്ടിക്കാം.  ലിസ്റ്റിൽ നിന്ന് ഗ്ലൈഡർ തിരഞ്ഞെടുക്കുക: എല്ലാ സാധാരണ ഗ്ലൈഡറുകളുടെയും അനുബന്ധ പോളാർ ഡാറ്റയുടെയും അക്ഷരമാലാക്രമത്തിലുള്ള ഒരു ലിസ്റ്റ് നിങ്ങൾക്ക് നൽകുന്നു. എല്ലാ ഗ്ലൈഡർ ഡാറ്റയും തിരഞ്ഞെടുത്ത പോളാറിൽ നിന്ന് പകർത്തപ്പെടും. മികച്ച ഗ്ലൈഡ് അനുപാതവും ഏറ്റവും കുറഞ്ഞ സിങ്ക് നിരക്കും പ്രദർശിപ്പിച്ചിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക. പോളാർ ഡാറ്റ നിങ്ങളുടെ ഗ്ലൈഡറിന്റെ പ്രകടനവുമായി പൊരുത്തപ്പെടുന്നുണ്ടോ എന്ന് കാണാൻ, വീണ്ടുംview നിങ്ങൾക്ക് മൂല്യങ്ങൾ പരിശോധിക്കാൻ കഴിയുന്ന MacCready ക്രമീകരണ മെനു.
ലിസ്റ്റിൽ നിന്ന് ഗ്ലൈഡർ തിരഞ്ഞെടുക്കുക: എല്ലാ സാധാരണ ഗ്ലൈഡറുകളുടെയും അനുബന്ധ പോളാർ ഡാറ്റയുടെയും അക്ഷരമാലാക്രമത്തിലുള്ള ഒരു ലിസ്റ്റ് നിങ്ങൾക്ക് നൽകുന്നു. എല്ലാ ഗ്ലൈഡർ ഡാറ്റയും തിരഞ്ഞെടുത്ത പോളാറിൽ നിന്ന് പകർത്തപ്പെടും. മികച്ച ഗ്ലൈഡ് അനുപാതവും ഏറ്റവും കുറഞ്ഞ സിങ്ക് നിരക്കും പ്രദർശിപ്പിച്ചിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക. പോളാർ ഡാറ്റ നിങ്ങളുടെ ഗ്ലൈഡറിന്റെ പ്രകടനവുമായി പൊരുത്തപ്പെടുന്നുണ്ടോ എന്ന് കാണാൻ, വീണ്ടുംview നിങ്ങൾക്ക് മൂല്യങ്ങൾ പരിശോധിക്കാൻ കഴിയുന്ന MacCready ക്രമീകരണ മെനു.  a, b, c എന്നീ ഗുണകങ്ങൾ മാറ്റി ധ്രുവത്തിൽ മാറ്റം വരുത്താം. a, b, c എന്നീ പാരാമീറ്ററുകളുള്ള ഒരു ക്വാഡ്രാറ്റിക് സമവാക്യമായാണ് ധ്രുവത്തെ നിർവചിച്ചിരിക്കുന്നത്.
a, b, c എന്നീ ഗുണകങ്ങൾ മാറ്റി ധ്രുവത്തിൽ മാറ്റം വരുത്താം. a, b, c എന്നീ പാരാമീറ്ററുകളുള്ള ഒരു ക്വാഡ്രാറ്റിക് സമവാക്യമായാണ് ധ്രുവത്തെ നിർവചിച്ചിരിക്കുന്നത്.
ഒരു നിശ്ചിത ഗ്ലൈഡറിന്റെ ധ്രുവത്തിനായുള്ള a, b, c എന്നീ ഗുണകങ്ങൾ കണക്കാക്കാൻ SeeYou പ്രോഗ്രാം (Tools->Polar) ഉപയോഗിക്കുക. തിരഞ്ഞെടുത്ത വേഗതയിൽ മൂന്ന് സിങ്ക് പോയിന്റുകൾ നൽകേണ്ടത് പ്രോഗ്രാമിന്റെ ആവശ്യമാണ് (ഉദാ: 100 km/h, 130 km/h, 150 km/h). പ്രോഗ്രാം a, b, c എന്നിവയുടെ മൂല്യങ്ങൾ കണക്കാക്കും, അത് LXNAV SxHAWK-യിൽ രേഖപ്പെടുത്തുകയും നൽകുകയും വേണം.
- ക്ലാസ്: ടൂറിംഗ്, അൾട്രാലൈറ്റ്, വേൾഡ്, ട്വിൻ-സീറ്റർ, ക്ലബ്, 18-മീറ്റർ, 15-മീറ്റർ, ഓപ്പൺ, സ്റ്റാൻഡേർഡ്, അജ്ഞാതം എന്നിവയ്ക്കുള്ള ഓപ്ഷനുകൾ ലഭ്യമാണ്.
- എ, ബി, സി: ലിസ്റ്റുചെയ്യാത്ത ഗ്ലൈഡറിനായി ഓപ്ഷനുകൾ ക്രമീകരിക്കാനോ നൽകാനോ കഴിയും.
- റഫറൻസ് ലോഡ് (വിംഗ് ലോഡിംഗ്) മൂല്യം ധ്രുവം അളന്ന മൂല്യത്തെ പ്രതിനിധീകരിക്കുന്നു.
- റഫറൻസ് ഭാരം ധ്രുവം അളന്ന ഭാര മൂല്യവുമായി പൊരുത്തപ്പെടുന്നു.
- പരമാവധി ടേക്ക്-ഓഫ് ഭാരം എന്നത് ഗ്ലൈഡറിന് അനുവദനീയമായ പരമാവധി ടേക്ക്-ഓഫ് ഭാരമാണ്. ഇത് കണക്കുകൂട്ടലിൽ ഉപയോഗിക്കുന്നില്ല; പരമാവധി ടേക്ക്-ഓഫ് ഭാരത്തെക്കുറിച്ചുള്ള പൈലറ്റിനുള്ള ഒരു ഓർമ്മപ്പെടുത്തൽ മാത്രമാണ് ഇത്. പൈലറ്റും ബാലസ്റ്റും ഇല്ലാത്ത ഗ്ലൈഡറിന്റെ ഭാരമാണ് ശൂന്യമായ ഭാരം.
- പാരച്യൂട്ടും ബാഗേജും ഉള്ള പൈലറ്റിന്റെ ഭാരമാണ് പൈലറ്റ് ഭാരം.
- പാരച്യൂട്ടും ബാഗേജുമുള്ള സഹപൈലറ്റിന്റെ ഭാരമാണ് കോ പൈലറ്റ് ഭാരം.

![]() രണ്ട്-സീറ്റർ കോൺഫിഗറേഷന്റെ കാര്യത്തിൽ രണ്ട് ഉപയോക്താക്കൾക്കും പാരാമീറ്ററുകൾ മാറ്റാനുള്ള സാധ്യതകളുണ്ട്. അവസാനമായി നടത്തിയ മാറ്റം രണ്ട് ഉപകരണങ്ങളിലേക്കും സമന്വയിപ്പിച്ചിരിക്കുന്നു.
രണ്ട്-സീറ്റർ കോൺഫിഗറേഷന്റെ കാര്യത്തിൽ രണ്ട് ഉപയോക്താക്കൾക്കും പാരാമീറ്ററുകൾ മാറ്റാനുള്ള സാധ്യതകളുണ്ട്. അവസാനമായി നടത്തിയ മാറ്റം രണ്ട് ഉപകരണങ്ങളിലേക്കും സമന്വയിപ്പിച്ചിരിക്കുന്നു.
5.6.12.2 വേഗത
ഉപയോക്താവിന് ഇനിപ്പറയുന്ന വേഗത സജ്ജമാക്കാൻ കഴിയും:
- സ്റ്റാൾ വേഗത (VS0)
- സ്റ്റാൾ വേഗത (VS1)
- അപ്രോച്ച് വേഗത (VAPP)
- മികച്ച കയറ്റം (വെസ്റ്റ്)
- പരമാവധി ഫ്ലാപ്പുകൾ (Vfe)
- കുസൃതി വേഗത (Va)
- പരമാവധി വേഗത (Vne)
സ്റ്റാൾ സ്പീഡ് പോലുള്ള മുന്നറിയിപ്പുകളായി ഈ വേഗത ഉപയോഗിക്കും
5.6.12.3 ഫ്ലാപ്പുകൾ
ഫ്ലാപ്പുകൾ സജ്ജീകരിക്കുന്നതിന് കൂടുതൽ വിവരങ്ങൾക്ക് ദയവായി അധ്യായം 5.6.11.5 കാണുക.
5.6.13 പാസ്വേഡ്
ചുവടെ ലിസ്റ്റുചെയ്തിരിക്കുന്നതുപോലെ നിർദ്ദിഷ്ട നടപടിക്രമങ്ങൾ പ്രവർത്തിപ്പിക്കുന്ന നിരവധി സിസ്റ്റം പാസ്വേഡുകൾ ഉണ്ട്:  5.6.13.1 പാസ്വേഡ് പ്രവർത്തനങ്ങളുടെ പട്ടിക
5.6.13.1 പാസ്വേഡ് പ്രവർത്തനങ്ങളുടെ പട്ടിക
| മുഴുവൻ ലോഗ്ബുക്കും ഇല്ലാതാക്കുക | 99999 |
| ഫാക്ടറി ഡിഫോൾട്ടിലേക്ക് പുനഃസജ്ജമാക്കുക | 666 |
| ഓപ്ഷൻ ആക്ടിവേഷൻ / ഡീആക്ടിവേഷൻ | 30000 |
| AHRS വീണ്ടും സജീവമാക്കുന്നു | 23519 |
| യാന്ത്രിക പൂജ്യം | 1043 |
| SD കാർഡിലേക്ക് റിപ്പോർട്ട് ചെയ്യുക | 111 |
| ഫേംവെയർ അപ്ഡേറ്റ് ചെയ്യുക | 89891 |
| AHRS പാസ്വേഡ് ഇല്ലാതാക്കുക | 23519 |
| ആരംഭിക്കാം ലോഗർ | 43001 |
| ഫോർമാറ്റ് ഇന്റേണൽ FILEസിസ്റ്റം (എല്ലാ ഡാറ്റയും നഷ്ടപ്പെടും) | 32233 |
5.6.14 കുറിച്ച്
ഡിസ്പ്ലേ പ്ലാറ്റ്ഫോമിനെയും സെൻസർ ബോക്സിനെയും കുറിച്ചുള്ള വിവരങ്ങൾ പേജിൽ ആകാം viewed.
ഉപയോക്താവിന് കഴിയും view ഇനിപ്പറയുന്ന വിശദാംശങ്ങൾ:
- IGC സീരിയൽ നമ്പർ
- സൂചക പതിപ്പ് എ, ബി,
- സെൻസർ ബോക്സ് പതിപ്പ് എ, ബി.

വേരിയോമീറ്ററും ആൾട്ടിമീറ്ററും
ന്യൂമാറ്റിക് സെൻസറുകളിൽ നിന്നുള്ള എല്ലാ സിഗ്നലുകളും (ഉയരം, വേഗത) ഉയർന്ന നിലവാരമുള്ള മർദ്ദ സെൻസറുകളിൽ നിന്നാണ് ഉരുത്തിരിഞ്ഞത്, അതായത് ഫ്ലാസ്ക് ആവശ്യമില്ല. വേരിയോ സിഗ്നൽ ഉയര സിഗ്നലിൽ നിന്നാണ് ഉരുത്തിരിഞ്ഞത്. എല്ലാ സിഗ്നലുകളും താപനിലയും ഉയരവും നികത്തിയിരിക്കുന്നു. കളർ ഡിസ്പ്ലേ വേരിയോ വിവരങ്ങളും മറ്റ് നിരവധി പാരാമീറ്ററുകളും കാണിക്കുന്നു.
ഡിസ്പ്ലേ ഉപയോക്താവിന് ക്രമീകരിക്കാവുന്നതാണ്. വേരിയോമീറ്റർ ഇനിപ്പറയുന്നവ കാണിക്കുന്നതിനായി കോൺഫിഗർ ചെയ്യാം:
- പരിധി 5, 10, 2.5 മീ/സെക്കൻഡ് അല്ലെങ്കിൽ 10, 20, 5 കിലോമീറ്റർ.
- സമയ സ്ഥിരാങ്കങ്ങൾ 0.1 സെക്കൻഡ് മുതൽ 5 സെക്കൻഡ് വരെയാണ്, കൂടാതെ വേരിയോ സിഗ്നലിനായി ഇലക്ട്രോണിക് പ്രോസസ്സിംഗിനായി 4 ക്രമീകരണങ്ങളുമുണ്ട്.
- നെറ്റോ വായു പിണ്ഡത്തിന്റെ ഉയർച്ചയും മുങ്ങലും കാണിക്കുന്നു.
- ഗ്ലൈഡർ തെർമലിംഗ് വേഗതയിൽ വട്ടമിട്ടു പറക്കുകയാണെങ്കിൽ കൈവരിക്കാവുന്ന ലിഫ്റ്റ് അല്ലെങ്കിൽ സിങ്ക് റിലേറ്റിവ് കാണിക്കുന്നു.
മൊത്തത്തിലുള്ള ഊർജ്ജത്തിനായി വേരിയോ സൂചനകൾ ശരിയാക്കാൻ രണ്ട് വഴികളുണ്ട്. ഇലക്ട്രോണിക് ടിഇ നഷ്ടപരിഹാരം സമയത്തിനനുസരിച്ചുള്ള വേഗത മാറ്റത്തെയും ഒരു ടിഇ പ്രോബ് ഉപയോഗിച്ച് ന്യൂമാറ്റിക് നഷ്ടപരിഹാരത്തെയും അടിസ്ഥാനമാക്കിയുള്ളതാണ്. TE നഷ്ടപരിഹാരത്തിന്റെ ഗുണനിലവാരം പൂർണ്ണമായും TE ട്യൂബിന്റെ സ്ഥാനം, വലിപ്പം, അളവ് എന്നിവയെ ആശ്രയിച്ചിരിക്കുന്നു. ഇൻസ്റ്റാളേഷൻ ലീക്ക് പ്രൂഫ് ആയിരിക്കണം.
![]() ഒരു ഇലക്ട്രോണിക് TE നഷ്ടപരിഹാരം തിരഞ്ഞെടുത്തിട്ടുണ്ടെങ്കിൽ TE (Pst) പോർട്ട് ഒരു നല്ല സ്റ്റാറ്റിക് പ്രഷർ സ്രോതസ്സുമായി ബന്ധിപ്പിച്ചിരിക്കണം. ന്യൂമാറ്റിക് നഷ്ടപരിഹാരം തിരഞ്ഞെടുത്തിട്ടുണ്ടെങ്കിൽ TE (Pst) പോർട്ട് TE അന്വേഷണവുമായി ബന്ധിപ്പിക്കണം.
ഒരു ഇലക്ട്രോണിക് TE നഷ്ടപരിഹാരം തിരഞ്ഞെടുത്തിട്ടുണ്ടെങ്കിൽ TE (Pst) പോർട്ട് ഒരു നല്ല സ്റ്റാറ്റിക് പ്രഷർ സ്രോതസ്സുമായി ബന്ധിപ്പിച്ചിരിക്കണം. ന്യൂമാറ്റിക് നഷ്ടപരിഹാരം തിരഞ്ഞെടുത്തിട്ടുണ്ടെങ്കിൽ TE (Pst) പോർട്ട് TE അന്വേഷണവുമായി ബന്ധിപ്പിക്കണം.
6.1 ആൾട്ടിമീറ്റർ
LXNAV SxHAWK യുടെ ആൾട്ടിമീറ്റർ -20ºC മുതൽ + 60ºC വരെയുള്ള താപനിലയ്ക്ക് നഷ്ടപരിഹാരം നൽകുന്നു.
ആൾട്ടിമീറ്റർ 20000 മീറ്റർ വരെ കാലിബ്രേറ്റ് ചെയ്തിരിക്കുന്നു.
6.2 സ്പീഡ് കമാൻഡ്
ക്രോസ്കൺട്രി സ്പീഡ് ഒപ്റ്റിമൈസ് ചെയ്യുന്നതിനുള്ള വളരെ ഉപയോഗപ്രദമായ ഉപകരണമാണ് MacCready സിദ്ധാന്തത്തെ അടിസ്ഥാനമാക്കിയുള്ള സ്പീഡ് കമാൻഡ് ഫ്ലൈയിംഗ്. ഉപകരണം സ്പീഡ് കമാൻഡ് മോഡിലേക്ക് മാറുമ്പോൾ, ഓഡിയോ മാറുകയും പൈലറ്റ് വളരെ വേഗത്തിലാണോ അതോ വളരെ പതുക്കെയാണോ പറക്കുന്നത് എന്ന് അറിയിക്കുന്ന ഡയറക്ടറായി മാറും. വേരിയോയും സ്പീഡ് കമാൻഡ് ഓഡിയോയും തമ്മിലുള്ള ആശയക്കുഴപ്പം കുറയ്ക്കുന്നതിന് ചില പ്രത്യേക സവിശേഷതകൾ ഉൾപ്പെടുത്തിയിട്ടുണ്ട്:
- തുടർച്ചയായ ഓഡിയോ സിഗ്നലും മറ്റ് തരത്തിലുള്ള സിഗ്നലുകളും തിരഞ്ഞെടുക്കാം. വിശദാംശങ്ങൾക്ക് സജ്ജീകരണം കാണുക.
- ശരിയായ വേഗതയിൽ ഓഡിയോ ഇല്ല (ഡെഡ് ബാൻഡ്).
ഹോക്ക്
7.1 ആമുഖം
എൽഎക്സ്എൻഎവിയുമായി സഹകരിച്ച് പ്രൊഫ. ത്രിമാന കാറ്റ് വെക്റ്റർ അളക്കുന്നതിനുള്ള തികച്ചും പുതിയ സമീപനമാണ് ഇത് അവതരിപ്പിക്കുന്നത്.
ഒരു പരമ്പരാഗത വേരിയോ ഊർജ്ജ സംരക്ഷണ തത്വത്തെ അടിസ്ഥാനമാക്കി ഗ്ലൈഡറിന്റെ (വേരിയോ) ലംബമായ ചലനം അളക്കുന്നു. ഈ മൂല്യം LX ഉപകരണത്തിന്റെ ചുവന്ന സൂചിക്ക് നൽകാം. തികച്ചും മിനുസമാർന്ന വായുവിൽ, ലംബമായ ഗതികോർജ്ജത്തിന്റെ (വേഗത) മാറ്റം തുല്യമായ പൊട്ടൻഷ്യൽ എനർജി (ഉയരം) കൊണ്ട് നഷ്ടപരിഹാരം നൽകുന്നു. ഒരു ടോട്ടൽ എനർജി കോമ്പൻസേറ്റഡ് (TEK) വേരിയോ സ്ഥിരമായ തിരശ്ചീന പ്രവേഗത്തിന്റെ അവസ്ഥയിൽ നന്നായി പ്രവർത്തിക്കുന്നു. എന്നിരുന്നാലും, തിരശ്ചീന പ്രവേഗത്തിലെ (തിരശ്ചീന കാറ്റ് വീശൽ) ഏതെങ്കിലും മാറ്റത്തെ TEK വേരിയോ ലംബമായ പ്രവേഗത്തിന്റെ (കൈനറ്റിക് എനർജി) മാറ്റമായി വ്യാഖ്യാനിക്കുന്നു, അങ്ങനെ TEK വേരിയോയുടെ അറിയപ്പെടുന്ന തെറ്റായ വായനയ്ക്ക് കാരണമാകുന്നു.
HAWK ഗ്ലൈഡറിന്റെ ലംബമായ ചലനം അളക്കുന്നില്ല. ഇത് വായു പിണ്ഡത്തിന്റെ ചലനത്തെ ത്രിമാനത്തിൽ അളക്കുന്നു. ഗ്ലൈഡറിന്റെ ("HAWK വേരിയോ") ക്ലൈൻഡ് റേറ്റ്, വായു പിണ്ഡത്തിന്റെ ലംബമായ കയറ്റ നിരക്കിൽ നിന്ന് പോളാർ സർക്കിൾ നൽകുന്ന അനുയോജ്യമായ സിങ്ക് നിരക്ക് കുറയ്ക്കുന്നതിലൂടെയാണ് ലഭിക്കുന്നത്. അതിനാൽ, "HAWK vario" ഗ്ലൈഡറിന്റെ സാധ്യതയുള്ള കയറ്റ നിരക്ക് കാണിക്കുന്നുവെന്ന് മനസ്സിലാക്കേണ്ടത് പ്രധാനമാണ്. അനുയോജ്യമായ സാഹചര്യങ്ങളിൽ കൈവരിക്കാവുന്ന ഗ്ലൈഡറിന്റെ കയറ്റനിരക്കാണിത്. "HAWK vario" മൂല്യം തെർമലിംഗ് മോഡിൽ ഉപകരണത്തിന്റെ നീല സൂചി കാണിക്കുന്നു.
പൈലറ്റ് ടു-നീഡിൽ സമീപനം ഉപയോഗിക്കുകയാണെങ്കിൽ ചുവപ്പും നീല സൂചിയും സാധാരണയായി അടുത്താണ്. അവയിൽ കാര്യമായ വ്യത്യാസമുണ്ടെങ്കിൽ, പൈലറ്റ് ഒരു വലിയ സൈഡ്സ്ലിപ്പ് ആംഗിളിൽ പറക്കുന്നത് അധിക ഇഴയലിനും സിങ്കിനും കാരണമാകുമെന്ന് ഇത് സൂചിപ്പിക്കുന്നു. പുറത്തേക്ക് ചെറുതായി ചൂണ്ടുന്ന യാവ് സ്ട്രിംഗ് മാറ്റുന്നത് ചുവപ്പ് നീല സൂചിയെ സമീപിക്കുന്നു: യഥാർത്ഥ കയറ്റ നിരക്ക് ഉയരാൻ സാധ്യതയുള്ള നിരക്കിനെ സമീപിക്കുന്നു. ഇത് സെക്ഷൻ 7.3, 7.4 എന്നിവയിൽ വിശദമായി ചർച്ച ചെയ്യും.
ക്രൂയിസ് മോഡിൽ, നീല HAWK സൂചി "നെറ്റോ" അല്ലെങ്കിൽ "ബന്ധു" എന്നതിന് നൽകണം. എല്ലാ വേഗതയിലും HAWK സൂചി പിന്നീട് വായു പിണ്ഡത്തിന്റെ ("നെറ്റോ") കയറ്റ നിരക്ക് കാണിക്കുന്നു. സൂചിയിൽ "ബന്ധു" എന്ന് അസൈൻ ചെയ്തിട്ടുണ്ടെങ്കിൽ, അത് "നെറ്റോ" യിൽ നിന്ന് കുറയ്ക്കുന്ന ഏറ്റവും കുറഞ്ഞ സിങ്ക് നിരക്ക് കാണിക്കുന്നു.
വായു പിണ്ഡത്തിന്റെ ചലനത്തിന്റെ തിരശ്ചീന അളവുകൾ കാറ്റിനെ കാണിക്കുന്നു. കാറ്റ് ജീവനുള്ള കാറ്റാണ്. മൗണ്ടൻ ഫ്ളൈയിംഗിൽ, തത്സമയം കാറ്റിന്റെ ദ്രുതഗതിയിലുള്ള മാറ്റങ്ങളെത്തുടർന്ന് കാറ്റിന്റെ സൂചന ഉണ്ടായിരിക്കേണ്ടത് നിർണായകമാണ്. ഇന്നത്തെ കാറ്റ് എസ്റ്റിമേഷൻ അൽഗോരിതങ്ങൾ മിനിറ്റുകളുടെ പരിധിയിൽ ശരാശരി സമയങ്ങളുള്ള ശരാശരി മൂല്യങ്ങൾ മാത്രമേ നൽകൂ.
HAWK യുടെ സവിശേഷമായ വ്യത്യാസം
- ഇത് തിരശ്ചീന കാറ്റും ലംബ വായു പിണ്ഡ ചലനവും (വേരിയോ) തത്സമയം നൽകുന്നു.
- ഫാസ്റ്റ് ക്രൂയിസ് മോഡിൽ തിരശ്ചീനമായ കാറ്റ് കാരണം തെറ്റായ കയറ്റ സൂചനകളൊന്നുമില്ല. HAWK സിഗ്നലുകൾ ഒരു തെർമൽ കാണിക്കുന്നുവെങ്കിൽ ഉയർന്ന സാധ്യതയുള്ള ഒരു തെർമൽ ഉണ്ട്.
- TEK വേരിയൊയെക്കാൾ ഒരു തെർമലിനെ സമീപിക്കുമ്പോൾ കുറച്ച് സെക്കൻഡ് മുമ്പുള്ള സൂചന
- പ്രക്ഷുബ്ധമായ തെർമലുകളിൽ തിരശ്ചീനമായ കാറ്റ് കാരണം തെറ്റായ വായനയില്ല.
- നഷ്ടപരിഹാരം ആവശ്യമില്ല.
¹RWTH ആച്ചൻ യൂണിവേഴ്സിറ്റിയും ബാർഖൗസെൻ ഇൻസ്റ്റിറ്റ്യൂട്ടും, ഡ്രെസ്ഡൻ, ജർമ്മനി.
²വോഡഫോൺ ചെയർ മൊബൈൽ കമ്മ്യൂണിക്കേഷൻസ് സിസ്റ്റംസ്, ടെക്നിഷെ യൂണിവേഴ്സിറ്റി ഡ്രെസ്ഡെൻ, ജർമ്മനി.
v7.2 വിൻഡ് മോഡൽ
HAWK-ന് ത്രിമാന കാറ്റ് വെക്റ്ററിന്റെ ഗണിതശാസ്ത്ര മാതൃക ആവശ്യമാണ്. HAWK കണക്കാക്കിയ കാറ്റ് ഫീൽഡ് ചുവടെയുള്ള ചിത്രം കാണിക്കുന്നു. കാറ്റ് വെക്റ്റർ d(x, y, z; t) മൂന്നിനെ ആശ്രയിച്ചിരിക്കുന്നു 
സ്പേഷ്യൽ കോർഡിനേറ്റുകൾ (x, y, z) സമയം t. വളരെ സങ്കീർണ്ണമായ ഗണിത സമവാക്യങ്ങൾ ഉപയോഗിച്ചാണ് കാറ്റിന്റെ മണ്ഡലത്തെ വിവരിക്കുന്നത്. നമ്മുടെ ആവശ്യങ്ങൾക്ക്, വളരെ ലളിതമായ ഒരു മാതൃക ഉപയോഗിക്കുന്നത് മതിയാകും.
കാറ്റിന്റെ വെക്റ്ററിൽ രണ്ട് ഘടകങ്ങൾ അടങ്ങിയിരിക്കുന്നുവെന്ന് നമുക്ക് അനുമാനിക്കാം: സാവധാനം മാറുന്ന ഒരു ഘടകവും വേഗത്തിൽ മാറുന്ന ക്രമരഹിതമായ അസ്വസ്ഥതയും. അടുത്ത ചിത്രം കാണിക്കുന്നത് വായു പിണ്ഡം കൂടുതൽ പ്രക്ഷുബ്ധമാകുമ്പോൾ ക്രമരഹിതമായ വർദ്ധനവ് വലുതായിരിക്കും എന്നാണ്. മൂന്ന് കാറ്റിന്റെ ഘടകങ്ങളും പരസ്പരം സ്വതന്ത്രമാണെന്ന് അനുമാനിക്കപ്പെടുന്നു. മൂന്നും ഒരേ ഗണിത നിയമം അനുസരിക്കുന്നു.
ഡിസ്പ്ലേയിൽ ത്രിമാന വെക്റ്ററിന്റെ പെർസ്പെക്റ്റീവ് പ്രാതിനിധ്യം ഗ്ലൈഡറുകൾക്ക് അർത്ഥമാക്കുന്നില്ല. ഗ്ലൈഡർ പൈലറ്റുമാർ വാരിയോയിലെ വെക്റ്ററിന്റെ ലംബ ഘടകം വായിക്കാനും xy ഘടകങ്ങളെ "കാറ്റ്" ആയി വ്യാഖ്യാനിക്കാനും പതിവാണ്.  മോഡലിനെക്കുറിച്ചുള്ള അവബോധജന്യമായ ധാരണയ്ക്കായി, ഞങ്ങൾ ലംബ ഘടകത്തിലേക്ക് സ്വയം പരിമിതപ്പെടുത്തുന്നു. പോയിന്ററിന്റെ ചലനങ്ങൾ ഉപയോഗിച്ച് വേരിയോമീറ്ററിന്റെ നിരക്ക് വ്യാഖ്യാനിക്കാൻ ഞങ്ങൾ പതിവാണ്. ഇക്കാരണത്താൽ, 1 സെക്കൻഡിന്റെ സമയ ഇടവേളയിൽ ഞങ്ങൾ വർദ്ധനവ് നോക്കുന്നു.
മോഡലിനെക്കുറിച്ചുള്ള അവബോധജന്യമായ ധാരണയ്ക്കായി, ഞങ്ങൾ ലംബ ഘടകത്തിലേക്ക് സ്വയം പരിമിതപ്പെടുത്തുന്നു. പോയിന്ററിന്റെ ചലനങ്ങൾ ഉപയോഗിച്ച് വേരിയോമീറ്ററിന്റെ നിരക്ക് വ്യാഖ്യാനിക്കാൻ ഞങ്ങൾ പതിവാണ്. ഇക്കാരണത്താൽ, 1 സെക്കൻഡിന്റെ സമയ ഇടവേളയിൽ ഞങ്ങൾ വർദ്ധനവ് നോക്കുന്നു. 
മുകളിലുള്ള ചിത്രത്തിൽ, വേരിയോമീറ്റർ 3m/s മൂല്യം കാണിക്കുന്നു. ഈ മൂല്യം മോഡലിന്റെ സാവധാനം മാറുന്ന ഭാഗവുമായി യോജിക്കുന്നു. വേഗത്തിൽ മാറുന്ന, ക്രമരഹിതമായ ഭാഗം ശരാശരിക്ക് ചുറ്റുമുള്ള പോയിന്ററിന്റെ ഏറ്റക്കുറച്ചിലുകളുമായി യോജിക്കുന്നു. പോയിന്റർ ഏറ്റക്കുറച്ചിലുകൾ ഗാസ് വിതരണം ചെയ്തിരിക്കുന്നു, മുകളിലുള്ള വലത് ചിത്രം കാണുക. സ്റ്റാൻഡേർഡ് ഡീവിയേഷൻ പാരാമീറ്റർ, σd, 3 m/s ന്റെ ശരാശരിക്ക് ചുറ്റും ഒരു ഇൻക്രിമെന്റ് എത്രത്തോളം സാധ്യതയുണ്ടെന്ന് നിർണ്ണയിക്കുന്നു. ഉദാഹരണത്തിന്ample, σd = 1 m/s എന്നത് എല്ലാ മാറ്റങ്ങളുടെയും 68% 1 m/s ഇടവേളയിലാണെന്ന് പ്രസ്താവിക്കുന്നു. σd = 0.1 എന്ന മൂല്യം വളരെ ശാന്തമായ വായു പിണ്ഡത്തിന് തുല്യമാണ്. മിക്ക മാറ്റങ്ങളും 0.1 m/s ഇടവേളയിലായിരിക്കും.
യഥാർത്ഥ മോഡൽ പാരാമീറ്റർ σd തീർച്ചയായും ഉപകരണത്തിന് അജ്ഞാതമാണ്. അതിനാൽ, പ്രധാന ചോദ്യം, S10/100-ൽ അനുബന്ധ പാരാമീറ്റർ എങ്ങനെ തിരഞ്ഞെടുക്കാം എന്നതാണ്.
കാറ്റ് വ്യത്യാസത്തിന്റെ വ്യത്യസ്ത മൂല്യങ്ങൾക്കായി ഒരേ ഡാറ്റ സെൻസർ സിഗ്നലുകൾ ഉപയോഗിക്കുകയും വേരിയോയുടെ സ്വഭാവം പഠിക്കുകയും ചെയ്യുക എന്നതാണ് ഇതിനുള്ള ഏക മാർഗം. S100/10-ലെ പ്രത്യേക ലോഗിംഗ് ഫംഗ്ഷൻ ഉപയോഗിച്ച് 100Hz-ൽ എല്ലാ സെൻസർ സിഗ്നലുകളും റെക്കോർഡ് ചെയ്യുന്നതിനാൽ ഞങ്ങൾക്ക് ഇത് ചെയ്യാൻ കഴിയും.
ഒരു സാധാരണ ഫ്ലൈറ്റിൽ കാറ്റ് വേരിയൻസ് = (0.001, 0.05, 0.1, 0.5) വിവിധ മൂല്യങ്ങൾക്കായുള്ള എയർ മാസ് മൂവ്മെന്റിന്റെ പെരുമാറ്റം.
നമുക്ക് ഒരു മൂല്യം തിരഞ്ഞെടുക്കാം wind variance = 0.1, അത് വിശ്വസനീയമായി തോന്നുന്നു. ഗുണപരമായി, നമ്മൾ വളരെ ചെറിയ ഒരു wind variance = 0.001 തിരഞ്ഞെടുക്കുകയാണെങ്കിൽ, അൽഗോരിതം എസ്റ്റിമേറ്റിനെ ശരാശരിയാക്കും, കാരണം അത് വലിയ വ്യതിയാനങ്ങളെ ∆d വളരെ സാധ്യതയില്ലാത്തതായി കണക്കാക്കുകയും അവയെ അടിച്ചമർത്തുകയും ചെയ്യുന്നു. അടുത്തതായി നമ്മൾ വിപരീത കേസ് പരിഗണിക്കുകയും വളരെ വലിയ മൂല്യം wind variance = 0.5 തിരഞ്ഞെടുക്കുകയും ചെയ്യുന്നു. അൽഗോരിതം ഏതൊരു അസ്വസ്ഥതയ്ക്കും വേഗത്തിൽ പ്രതികരിക്കുന്നു. ഉപകരണത്തിലെ സൂചിയുടെ ഒരു നാഡീ വായന നമ്മൾ നിരീക്ഷിക്കും. മുകളിലുള്ള ചിത്രം ഒരു സാധാരണ പറക്കലിന്റെ ഒരു ഭാഗം കാണിക്കുന്നു.
ഏറ്റവും സാധ്യതയുള്ള മൂല്യങ്ങൾ കാറ്റിന്റെ വ്യതിയാനം = 0.1 ആണെന്ന് ഞങ്ങൾ നിരീക്ഷിക്കുന്നു. കാറ്റിന്റെ വ്യതിയാനം = 0.5 ന് ക്രമരഹിതമായ ഏറ്റക്കുറച്ചിലുകൾ വലുതാണ്. 0.05 നേക്കാൾ ചെറിയ മൂല്യങ്ങൾ വളരെ ചെറുതാണ്, കാരണം അവ സമയ സ്വഭാവത്തിന്റെ പ്രധാന വിശദാംശങ്ങൾ അടിച്ചമർത്തുന്നു. 0.05 എന്ന ഇടവേളയിലെ മൂല്യങ്ങളാണ് അഭികാമ്യമെന്ന് തോന്നുന്നു. എന്നാൽ ഇത് കർശനമായ ഗണിതശാസ്ത്ര ഒപ്റ്റിമൈസേഷനെ അടിസ്ഥാനമാക്കിയുള്ളതല്ലാത്ത ഗുണപരവും ആത്മനിഷ്ഠവുമായ ഒരു നിരീക്ഷണമാണ്.
ചുരുക്കത്തിൽ, വിൻഡ് വേരിയൻസ് എന്ന വിൻഡ് പാരാമീറ്ററിന്റെ തിരഞ്ഞെടുപ്പ് വളരെ സെൻസിറ്റീവ് അല്ല. TEK വേരിയോയ്ക്കുള്ള വേരിയോസ് സൂചി ഫിൽട്ടർ എന്ന നിലയിൽ, പൈലറ്റിന്റെ വ്യക്തിപരമായ മുൻഗണനകൾക്ക് ഇത് ഇടം നൽകുന്നു. പരീക്ഷണ സമയത്ത് മിക്ക പൈലറ്റുമാരും 0.05 നും ഇടയിലുള്ള ഒരു മൂല്യം തിരഞ്ഞെടുത്തിട്ടുണ്ട്.
7.3 സാധ്യതയുള്ള കയറ്റ നിരക്ക്
"HAWK vario" എന്നത് അൽഗോരിതത്തിന്റെ പ്രാഥമിക വിവരങ്ങളിൽ നിന്ന് ഉരുത്തിരിഞ്ഞ അളവാണ്. കണക്കാക്കിയ ലംബ വായു പിണ്ഡത്തിന്റെ ചലനത്തിൽ ("നെറ്റോ") അനുയോജ്യമായ വൃത്താകൃതിയിലുള്ള പോളാർ സിങ്ക് നിരക്ക് കുറച്ചാണ് ഇത് കണക്കാക്കുന്നത്. "HAWK vario" ഗ്ലൈഡറിന്റെ സാധ്യതയുള്ള കയറ്റ നിരക്കിന് തുല്യമാണ്. ഇതിലൂടെ ഗ്ലൈഡറിന്റെ പരമാവധി കൈവരിക്കാവുന്ന കയറ്റ നിരക്ക് ഞങ്ങൾ മനസ്സിലാക്കുന്നു.  ചുവന്ന സൂചിയുടെ ("TEK വേരിയോ") യഥാർത്ഥ ക്ലൈം റേറ്റിനെ നീല സൂചിയുടെ ("ഹോക്ക് വേരിയോ") പൊട്ടൻഷ്യൽ ക്ലൈം റേറ്റുമായി താരതമ്യപ്പെടുത്തി താപവൽക്കരണ പ്രകടനം ഒപ്റ്റിമൈസ് ചെയ്യാൻ ടു-നീഡിൽ സമീപനം സഹായിക്കുന്നു. ഉദാample, പൈലറ്റ് ഒരു വലിയ സൈഡ്സ്ലിപ്പ് ആംഗിളിലാണ് പറക്കുന്നതെങ്കിൽ, ചെറിയ സൈഡ്സ്ലിപ്പ് ആംഗിൾ ഉപയോഗിച്ച് പറക്കുന്നതിലൂടെ രണ്ട് സൂചികൾ തമ്മിലുള്ള വ്യത്യാസം കുറയ്ക്കാനാകും. ചുവന്ന സൂചി നീല സൂചിയെ സമീപിക്കും: യഥാർത്ഥ കയറ്റ നിരക്ക് വലുതായി.
ചുവന്ന സൂചിയുടെ ("TEK വേരിയോ") യഥാർത്ഥ ക്ലൈം റേറ്റിനെ നീല സൂചിയുടെ ("ഹോക്ക് വേരിയോ") പൊട്ടൻഷ്യൽ ക്ലൈം റേറ്റുമായി താരതമ്യപ്പെടുത്തി താപവൽക്കരണ പ്രകടനം ഒപ്റ്റിമൈസ് ചെയ്യാൻ ടു-നീഡിൽ സമീപനം സഹായിക്കുന്നു. ഉദാample, പൈലറ്റ് ഒരു വലിയ സൈഡ്സ്ലിപ്പ് ആംഗിളിലാണ് പറക്കുന്നതെങ്കിൽ, ചെറിയ സൈഡ്സ്ലിപ്പ് ആംഗിൾ ഉപയോഗിച്ച് പറക്കുന്നതിലൂടെ രണ്ട് സൂചികൾ തമ്മിലുള്ള വ്യത്യാസം കുറയ്ക്കാനാകും. ചുവന്ന സൂചി നീല സൂചിയെ സമീപിക്കും: യഥാർത്ഥ കയറ്റ നിരക്ക് വലുതായി.
7.4 എയറോഡൈനാമിക് മോഡൽ
പിശക് സിഗ്നലുകൾ കണക്കാക്കാൻ HAWK, ഗ്ലൈഡറിന്റെ പോളാർ ഡയഗ്രമും സൈഡ്സ്ലിപ്പ് ഗുണകവും ഉപയോഗിക്കുന്നു. ഗ്ലൈഡറിന്റെ വായുസഞ്ചാര ഗുണങ്ങളിൽ നിന്നാണ് സൈഡ്സ്ലിപ്പ് ഗുണകം കണക്കാക്കുന്നത്.
ഈ പാരാമീറ്ററുകൾ HAWK-യുടെ ആന്തരിക വേരിയബിളുകളാണ്, ഉപയോക്താവിന് അവ പരിഷ്കരിക്കാൻ കഴിയില്ല.
ഗ്ലൈഡറിന്റെ പ്രകടനത്തിൽ സൈഡ്സ്ലിപ്പ് ആംഗിൾ ശക്തമായ സ്വാധീനം ചെലുത്തുന്നു. സൈഡ്സ്ലിപ്പ് ചെറുതായി നിലനിർത്താൻ പൈലറ്റിന് ലളിതവും എന്നാൽ പ്രധാനവുമായ ഒരു ഉപകരണമാണ് സ്ട്രിംഗ്. ഒരു സൈഡ്സ്ലിപ്പ് ഒരു അധിക വലിച്ചുനീട്ടലിന് കാരണമാകുന്നു, ഇത് സിങ്ക് റേറ്റ് വളരെയധികം വർദ്ധിപ്പിക്കുന്നതിനാൽ സർക്കിളിംഗ് സമയത്ത് പ്രത്യേകിച്ച് അരോചകമാണ്. പൈലറ്റ് ഒരു വലിയ റോൾ ആംഗിൾ (സർക്കിൾ പോളാർ) ഉപയോഗിച്ച് പറക്കുമ്പോൾ സിങ്ക് റേറ്റിന്റെ വർദ്ധനവ് ശക്തിപ്പെടുത്തുന്നു.
വൃത്താകൃതിയിലുള്ള പറക്കലിനിടെ മിക്ക പൈലറ്റുമാരും ചരട് അല്പം പുറത്തേക്ക് വച്ചാണ് പറക്കുന്നത്. HAWK സൈഡ്സ്ലിപ്പ് ആംഗിൾ കണക്കാക്കുന്നു. ഭൂരിഭാഗം പൈലറ്റുമാരും 4 ഡിഗ്രിയിൽ താഴെയുള്ള ചെറിയ സൈഡ്സ്ലിപ്പ് ആംഗിളുകളിലാണ് പറക്കുന്നത്.
ഒരു മുൻ വ്യക്തിയിലൂടെ പ്രഭാവം പ്രകടിപ്പിക്കുന്നതിന് മുമ്പ്ampഅപ്പോൾ, പരമ്പരാഗത TEK വേരിയൊയുടെ ചില സവിശേഷതകൾ നമുക്ക് ഓർമ്മിക്കാം. ഒരു സുഗമമായ തെർമൽ അനുമാനിക്കുകയാണെങ്കിൽ, TEK വേരിയൊ വായു പിണ്ഡ ചലനത്തെയല്ല, ഗ്ലൈഡറിന്റെ യഥാർത്ഥ കയറ്റ നിരക്ക് അളക്കുന്നു. നമ്മൾ ഒരു വലിയ സൈഡ് സ്ലിപ്പിൽ പറക്കുകയാണെങ്കിൽ, ഗ്ലൈഡറിന്റെ കയറ്റ നിരക്ക് അതേ തെർമലിൽ പൂജ്യം സൈഡ്സ്ലിപ്പിൽ പറക്കുന്നതിനേക്കാൾ ചെറുതാണ്. Netto TEK ഉം ആപേക്ഷിക TEK വേരിയൊയും Vario TEK യിലേക്ക് സ്ഥിരമായ സ്ഥിരാങ്കങ്ങൾ ചേർത്താണ് ഉരുത്തിരിഞ്ഞ അളവുകൾ. നിശ്ചല വായുവിലെ ധ്രുവ രേഖാചിത്രത്തിൽ നിന്നാണ് ഈ സ്ഥിരാങ്കങ്ങൾ കണക്കാക്കുന്നത്.
HAWK തികച്ചും വ്യത്യസ്തമായി പ്രവർത്തിക്കുന്നു: ലംബ കാറ്റ് ത്രികോണത്തിൽ നിന്ന് വായു പിണ്ഡത്തിന്റെ (നെറ്റോ HAWK) കയറ്റ നിരക്ക് ഇത് കണക്കാക്കുന്നു. ലംബ കാറ്റിന്റെയും (വായു പിണ്ഡത്തിന്റെ കയറ്റ നിരക്ക്) ലംബമായ യഥാർത്ഥ വായുവേഗതയുടെയും (സിങ്ക് നിരക്ക്) ആകെത്തുക ലംബമായ "നില" വേഗതയ്ക്ക് (ഗ്ലൈഡറിന്റെ യഥാർത്ഥ കയറ്റ നിരക്ക്) തുല്യമാണ്. ലംബമായ നില വേഗത ഗ്ലൈഡറിന്റെ യഥാർത്ഥ കയറ്റ നിരക്കാണ്. കൂടുതൽ വിശദാംശങ്ങൾ സെഗൽഫ്ലീഗൻ മാഗസിൻ "വിസെൻ, വോഹർ ഡെർ വിൻഡ് വെഹ്റ്റ്" എന്ന പേപ്പറിൽ കാണാം, അത് ഞങ്ങളുടെ വെബ്സൈറ്റിൽ നിന്ന് ഡൗൺലോഡ് ചെയ്യാം. webപേജ്.  ഒരു മുൻampവിശദാംശങ്ങൾ വ്യക്തമാക്കാൻ le വളരെയധികം സഹായിക്കുന്നു. ഒരു ASG 32 വഴി ഒരേ ഫ്ലൈറ്റിന്റെ മൂന്ന് വൃത്താകൃതിയിലുള്ള സെഗ്മെന്റുകളിലെ വേഗതകൾ താഴെയുള്ള പട്ടിക സംഗ്രഹിക്കുന്നു. ഏകദേശം 40 ഡിഗ്രി റോൾ ആംഗിളിൽ വലത് വൃത്താകൃതിയിലുള്ള സമയത്ത് സെഗ്മെന്റ് A എടുത്തിട്ടുണ്ട്. അടുത്ത പേജിലെ ചിത്രത്തിൽ ശരാശരി സൈഡ്സ്ലിപ്പ് ആംഗിൾ ഏകദേശം 2.7 ഡിഗ്രിയാണ്. ഗ്ലൈഡർ 1.4 മീ/സെക്കൻഡിൽ കയറുന്നു (പട്ടികയിലെ രണ്ടാം നിര). നെറ്റോ HAWK 2 മീ/സെക്കൻഡിന് തുല്യമാണ്. സിങ്ക് റേറ്റ് HAWK 2.7 മീ/സെക്കൻഡായി കണക്കാക്കപ്പെടുന്നു.
ഒരു മുൻampവിശദാംശങ്ങൾ വ്യക്തമാക്കാൻ le വളരെയധികം സഹായിക്കുന്നു. ഒരു ASG 32 വഴി ഒരേ ഫ്ലൈറ്റിന്റെ മൂന്ന് വൃത്താകൃതിയിലുള്ള സെഗ്മെന്റുകളിലെ വേഗതകൾ താഴെയുള്ള പട്ടിക സംഗ്രഹിക്കുന്നു. ഏകദേശം 40 ഡിഗ്രി റോൾ ആംഗിളിൽ വലത് വൃത്താകൃതിയിലുള്ള സമയത്ത് സെഗ്മെന്റ് A എടുത്തിട്ടുണ്ട്. അടുത്ത പേജിലെ ചിത്രത്തിൽ ശരാശരി സൈഡ്സ്ലിപ്പ് ആംഗിൾ ഏകദേശം 2.7 ഡിഗ്രിയാണ്. ഗ്ലൈഡർ 1.4 മീ/സെക്കൻഡിൽ കയറുന്നു (പട്ടികയിലെ രണ്ടാം നിര). നെറ്റോ HAWK 2 മീ/സെക്കൻഡിന് തുല്യമാണ്. സിങ്ക് റേറ്റ് HAWK 2.7 മീ/സെക്കൻഡായി കണക്കാക്കപ്പെടുന്നു.
ലംബ കാറ്റ് ത്രികോണം അനുസരിച്ച്, Netto HAWK യുടെയും സിങ്ക് റേറ്റ് HAWK യുടെയും സംഗ്രഹം 1.7 m/s ആണ്. ഹ്രസ്വകാല ശരാശരി കാരണം, വ്യത്യാസം യഥാർത്ഥ കയറ്റ നിരക്കിനേക്കാൾ കൃത്യമായി 1.4 m/s അല്ല. അടുത്തതായി നമ്മൾ ഇതിനെ TEK വേരിയൊയുടെ റീഡിംഗുകളുമായി താരതമ്യം ചെയ്യുന്നു. സെഗ്മെന്റ് A യ്ക്ക് മുകളിലുള്ള TEK യുടെയും HAWK യുടെയും ശരാശരി Netto മൂല്യങ്ങൾ ഒന്നുതന്നെയാണ്. ആറാമത്തെ വരിയിൽ, HAWK യുടെ കൃത്രിമ ചക്രവാളത്തിൽ കണക്കാക്കിയ റോൾ ആംഗിൾ ഉപയോഗിച്ച് സർക്കിൾ പോളറിൽ നിന്ന് കണക്കാക്കിയ സിങ്ക് റേറ്റ് ഞങ്ങൾ കാണിക്കുന്നു.
| ശരാശരി | എ (580 670കൾ) | ബി (2033 2106കൾ) | സി (2106 – 2194 സെ) |
| സൈഡ്സ്ലിപ്പ് ആംഗിൾ | 2.7 ഡിഗ്രി | 12 ഡിഗ്രി | 6.2 ഡിഗ്രി |
| ഗ്ലൈഡറിന്റെ കയറ്റ നിരക്ക് | 1.4മി/സെ | 1.8 m/s | 2.1 m/s |
| നെറ്റോ (HAWK) | 2.7 m/s | 4.4 m/s | 4.5 m/s |
| സിങ്ക് റേറ്റ് (HAWK) | 1.0 മീ/സെ | 2.9 മീ/സെ | 2.4 മീ/സെ |
| നെറ്റോ (TEK) | 2.7 m/s | 2.6 m/s | 3.2 m/s |
| സിങ്ക് റേറ്റ് (സർക്കിൾ പോളാർ) | 1.0 മീ/സെ | 1.1 മീ/സെ | 1.3 മീ/സെ |
| നെറ്റോ ഹോക്ക് - നെറ്റോ ടെക് | 0 m/s | 1.8 m/s | 1.3മി/സെ |
| വേരിയോ (ഹോക്ക്) | 1.7 m/s | 3.3 m/s | 3.2 m/s |
| വേരിയോ (TEK) | 1.8 m/s | 1.9 m/s | 2.4 m/s |
 ചുരുക്കത്തിൽ: ഗ്ലൈഡറിന്റെ സ്റ്റേഷണറി സർക്കിളിംഗ് സമയത്ത് TEK ഉം HAWK വേരിയോയും തമ്മിലുള്ള കരാർ പ്രത്യേകിച്ചും നല്ലതാണ്. സെഗ്മെന്റ് B ഉം C ഉം വിശകലനം ചെയ്യുമ്പോൾ ഇത് പൂർണ്ണമായും മാറുന്നു.
ചുരുക്കത്തിൽ: ഗ്ലൈഡറിന്റെ സ്റ്റേഷണറി സർക്കിളിംഗ് സമയത്ത് TEK ഉം HAWK വേരിയോയും തമ്മിലുള്ള കരാർ പ്രത്യേകിച്ചും നല്ലതാണ്. സെഗ്മെന്റ് B ഉം C ഉം വിശകലനം ചെയ്യുമ്പോൾ ഇത് പൂർണ്ണമായും മാറുന്നു.
താഴെയുള്ള ചിത്രത്തിൽ ASG 32 ന്റെ ഒരേ ഫ്ലൈറ്റിന്റെ രണ്ട് സെഗ്മെന്റുകൾ B ഉം C ഉം കാണിക്കുന്നു. 45 ഡിഗ്രി റോൾ ആംഗിളിൽ ഇടത് വൃത്താകൃതിയിലുള്ള ഭ്രമണത്തിനിടയിലാണ് അവ എടുക്കുന്നത്. സെഗ്മെന്റ് B യിൽ പൈലറ്റ് മനഃപൂർവ്വം സൈഡ്സ്ലിപ്പ് ആംഗിൾ 12 ഡിഗ്രിയുടെ വലിയ മൂല്യത്തിലേക്ക് വർദ്ധിപ്പിച്ചിരിക്കുന്നു. 
സെഗ്മെന്റ് സിയിൽ സൈഡ്സ്ലിപ്പ് കോൺ 6.2 ഡിഗ്രിയായി കുറഞ്ഞു. സ്ട്രിംഗ് പതിവുപോലെ ചെറുതായി പുറത്തേക്ക് ചൂണ്ടിയിരിക്കുന്നു.
ആദ്യം നമ്മൾ സെഗ്മെന്റ് ബി വിശകലനം ചെയ്യുന്നു, അവിടെ സൈഡ്സ്ലിപ്പ് ആംഗിൾ 12 ഡിഗ്രിയാണ്. ഗ്ലൈഡർ 1.8 മീ/സെക്കൻഡിൽ കയറുന്നു (പട്ടിക 2 ലെ രണ്ടാം വരി). ലംബ കാറ്റ് (നെറ്റോ HAWK) 1 മീ/സെക്കൻഡിന് തുല്യമാണ്. ലംബ TAS (സിങ്ക് റേറ്റ്) 4.4 മീ/സെക്കൻഡിന് തുല്യമാണ്. ലംബ കാറ്റ് ത്രികോണത്തെ അടിസ്ഥാനമാക്കി, ഈ രണ്ട് മൂല്യങ്ങളുടെയും സംഗ്രഹം 2.9 മീ/സെക്കൻഡിന് തുല്യമാണ്. ഹ്രസ്വകാല ശരാശരി കാരണം വ്യത്യാസം കൃത്യമായി 1.5 മീ/സെക്കൻഡ് കയറ്റ നിരക്കല്ല. അടുത്തതായി നമ്മൾ നെറ്റോ HAWK യെ TEK വേരിയൊയുടെ റീഡിംഗുകളുമായി താരതമ്യം ചെയ്യുന്നു.
ഏറ്റവും ശ്രദ്ധേയമായ ഫലം, TEK, HAWK എന്നിവയുടെ Netto മൂല്യങ്ങൾ 1.8 m/s വ്യത്യാസപ്പെട്ടിരിക്കുന്നു എന്നതാണ്, കാരണം വലിയ സൈഡ്സ്ലിപ്പ് കാരണം ഗ്ലൈഡറിന് വലിയ സിങ്ക് റേറ്റ് അനുഭവപ്പെടുന്നു. Vario TEK-യിൽ ഒരു നിശ്ചിത സ്ഥിരാങ്കം ചേർത്താണ് Netto TEK ഉരുത്തിരിഞ്ഞത്. ഈ സ്ഥിരാങ്കം വൃത്താകൃതിയുടെയും സൈഡ്സ്ലിപ്പിന്റെയും ആഘാതം പരിഗണിക്കുന്നില്ല.
അടുത്തതായി നമ്മൾ സെഗ്മെന്റ് സി വിശകലനം ചെയ്യുന്നു. സെഗ്മെന്റ് ബിയിലേതിനേക്കാൾ 2.1 മീ/സെക്കൻഡ് വേഗത്തിൽ ഗ്ലൈഡർ കയറുന്നു. ചെറിയ സൈഡ്സ്ലിപ്പിൽ ചെറിയ സിങ്ക് റേറ്റ് കാരണം ഇത് പ്രതീക്ഷിക്കുന്നു. സിങ്ക് റേറ്റ് HAWK 2.4 മീ/സെക്കൻഡ് ആയി കുറയുന്നു. നെറ്റോ TEK 2.6 മീ/സെക്കൻഡ് (B) ൽ നിന്ന് 3.2 മീ/സെക്കൻഡ് (C) ആയി വർദ്ധിക്കുന്നു. സെഗ്മെന്റ് C യിലെ കുറഞ്ഞ ഡ്രാഗ് മൂലമാണ് ഈ വർദ്ധനവ്. TEK യുടെയും HAWK യുടെയും നെറ്റോ മൂല്യങ്ങൾക്കിടയിൽ ഇപ്പോഴും 1.3 മീ/സെക്കൻഡ് (C) യുടെ വലിയ വ്യത്യാസമുണ്ട്, പക്ഷേ സെഗ്മെന്റ് B യെ അപേക്ഷിച്ച് വ്യത്യാസം കുറവാണ്. HAWK യുടെ സിങ്ക് റേറ്റ് 2.9 മീ/സെക്കൻഡിൽ നിന്ന് 2.4 മീ/സെക്കൻഡ് ആയി കുറയുന്നു. സിങ്ക് റേറ്റ് HAWK യും സർക്കിൾ പോളാർ സിങ്ക് റേറ്റും തമ്മിലുള്ള വ്യത്യാസം 1.1 മീ/സെക്കൻഡ് ആണ്. സൈഡ്സ്ലിപ്പ് മൂലമുണ്ടാകുന്ന ഡ്രാഗ് മൂലമുള്ള ക്ലൈംബിംഗ് റേറ്റ് നഷ്ടപ്പെടുന്നതിന് ഇത് തുല്യമാണ്.
ചില സന്ദർഭങ്ങളിൽ, ദുർബലമായ താപത്തിലെ ശരാശരി HAWK വേരിയോ 0.5 m/s വരെ വളരെ വലിയ കയറ്റ നിരക്ക് കാണിക്കുന്നതായി റിപ്പോർട്ട് ചെയ്യപ്പെട്ടിട്ടുണ്ട്. വൃത്താകൃതിയിലുള്ള പോളാർ കണക്കാക്കിയ സൈദ്ധാന്തിക മൂല്യത്തേക്കാൾ വലുതാണ് സിങ്ക് നിരക്ക് എന്ന് ലാബിൽ രേഖപ്പെടുത്തിയ ഫ്ലൈറ്റ് ഡാറ്റയുടെ വിശകലനം കാണിച്ചു. സൈഡ് സ്ലിപ്പ് ആംഗിൾ ചെറുതായിരുന്നു. അതിനാൽ വ്യത്യാസം സൈഡ് സ്ലിപ്പ് ആംഗിളിന് ആട്രിബ്യൂട്ട് ചെയ്യാൻ കഴിയില്ല. അധിക ഇഴച്ചിൽ പല കാരണങ്ങളാൽ സംഭവിക്കാം. ഒരൊറ്റ കാരണ-ഫല ലോജിക്കൽ ചെയിൻ തിരിച്ചറിയാൻ കഴിഞ്ഞില്ല. തെറ്റായ പോളാർ, ഗ്ലൈഡർ ഡാറ്റ, പ്രഷർ സിസ്റ്റത്തിന്റെ തകരാറുകൾ, കൃത്യമല്ലാത്ത സമയം പൊരുത്തപ്പെടാത്ത സ്റ്റാറ്റിക്, ടോട്ടൽ പ്രഷർ സിഗ്നലുകൾ തുടങ്ങിയവയാണ് സാധ്യമായ കാരണങ്ങൾ.
7.5 ചലനാത്മക സ്വഭാവം
TEK വേരിയൊയുടെയും HAWK വേരിയൊയുടെയും ചലനാത്മക സ്വഭാവം വ്യത്യസ്തമാണ്. HAWK, TEK എന്നീ വേരിയൊകൾ
മുകളിലുള്ള ആദ്യ ചിത്രത്തിൽ കാണിച്ചിരിക്കുന്നു. രണ്ട് വേരിയോകളുടെയും ശരാശരി കയറ്റ നിരക്ക് ഇതിൽ കാണിച്ചിരിക്കുന്നു
താഴെ വലത്. ചെറിയ ശരാശരി ഇടവേള കണക്കിലെടുക്കുമ്പോൾ അവ താരതമ്യപ്പെടുത്താവുന്നതാണ്.
പ്രതീക്ഷിക്കുന്നത്, സമയത്തിന്റെ ഒരു പ്രവർത്തനമെന്ന നിലയിൽ പെരുമാറ്റം ഗണ്യമായി വ്യത്യസ്തമാണ്. TEK വേരിയൊയുടെ സിഗ്നൽ
പൈലറ്റ് തിരഞ്ഞെടുക്കുന്ന ശരാശരി സമയ സ്ഥിരാങ്കത്തെയും തെറ്റായ സിഗ്നലുകളേയും ആശ്രയിച്ചിരിക്കുന്നു
തിരശ്ചീനമായ കാറ്റ് വഴി. HAWK വേരിയോ സിഗ്നൽ കാറ്റിന്റെ പാരാമീറ്ററായ SIGWIND നെ ആശ്രയിച്ചിരിക്കുന്നു, കൂടാതെ
ആന്തരിക പാരാമീറ്ററുകൾ. മിനുസമാർന്ന തെർമലുകളിൽ വേരിയോ സിഗ്നലുകളുടെ സാമ്യം വർദ്ധിക്കുന്നു.
തെർമൽ അസിസ്റ്റന്റ്: തെർമൽ അസിസ്റ്റന്റ് വ്യത്യസ്തമായ ഒരു പാറ്റേൺ കാണിക്കുന്നുവെന്ന് വ്യക്തമാണ്. ശ്രദ്ധിക്കുക
മുകളിലുള്ള ഉദാഹരണത്തിലെ HAWK വേരിയൊയുടെ പരമാവധിample സംഭവിക്കുന്നത് 4 സെക്കൻഡ് മുമ്പാണ്.
7.6 സെറ്റപ്പ് പാരാമീറ്ററുകൾ
7.6.1 നെറ്റോ വേരിയോ
ലംബമായ വായു പിണ്ഡത്തിന്റെ ചലനത്തെ HAWK കണക്കാക്കുന്നു. ഒരു പരമ്പരാഗത TEK വേരിയോമീറ്ററിന് "നെറ്റോ" എന്ന പദം ലംബമായ വായു പിണ്ഡത്തിന്റെ ചലനമായി മനസ്സിലാക്കുന്നു. എന്നിരുന്നാലും, TEK വേരിയോമീറ്റർ അളന്ന TEK Vario മൂല്യത്തിലേക്ക് സിങ്ക് നിരക്ക് ചേർത്ത് ലംബമായ വായു പിണ്ഡത്തിന്റെ ചലനത്തെ ഏകദേശമാക്കുന്നു. എന്നാൽ പ്രായോഗിക ആവശ്യങ്ങൾക്ക്, "നെറ്റോ" ഉം യഥാർത്ഥ ലംബമായ വായു പിണ്ഡത്തിന്റെ ചലനവും തമ്മിലുള്ള വ്യത്യാസം ചെറുതാണ്. ഇക്കാരണത്താൽ, ഞങ്ങൾ HAWK ന് "നെറ്റോ" എന്ന പദം ഉപയോഗിക്കുന്നു.
7.6.2 വേരിയോ
നഷ്ടപരിഹാരം നൽകുന്ന TEK വേരിയോമീറ്ററിന് (പ്രാഥമിക) ഔട്ട്പുട്ട് TEK Vario ആണ് ഗ്ലൈഡറിന്റെ യഥാർത്ഥ കയറ്റം/സിങ്ക് നിരക്ക്. "നെറ്റോ" എന്ന വായു പിണ്ഡത്തിന്റെ ലംബ ഘടകത്തിൽ നിന്ന് ധ്രുവ സിങ്ക് നിരക്ക് (TAS, റോൾ ആംഗിൾ) കുറച്ചാണ് HAWK മൂല്യം കണക്കാക്കുന്നത്. സർക്കിൾ പോളാർ കമ്പ്യൂട്ടേഷനിൽ കണക്കാക്കിയ റോൾ ആംഗിൾ ഉപയോഗിച്ചാണ് സിങ്ക് നിരക്ക് കണക്കാക്കുന്നത്.
7.6.3 റിലേറ്റീവ് വേരിയോ (സൂപ്പർ നെറ്റോ)
സ്പീഡ് ടു ഫ്ലൈ മോഡിൽ, ഒരു തെർമലിന്റെ പൊട്ടൻഷ്യൽ ക്ലൈം റേറ്റ് പൈലറ്റ് അറിയാൻ ആഗ്രഹിക്കുന്നു. ഈ മൂല്യം HAWK യുടെ ലംബ ക്ലൈം റേറ്റ് "നെറ്റോ" ആണ്. "നെറ്റോ" യിൽ നിന്ന് സ്ഥിരമായ ഏറ്റവും കുറഞ്ഞ സിങ്ക് റേറ്റ് കുറച്ചാൽ ഇതാണ് "ആപേക്ഷിക" ഔട്ട്പുട്ട്.
TEK വേരിയോമീറ്ററിന്, "ആപേക്ഷികത" പ്രാഥമിക ഉറവിടമായ TEK വേരിയോയിൽ നിന്ന് കണക്കാക്കേണ്ടത് നിലവിലെ സിങ്ക് നിരക്കിൽ നിന്ന് ഏറ്റവും കുറഞ്ഞ സിങ്ക് നിരക്ക് കുറച്ചാണ്. എല്ലാ കണക്കുകൂട്ടലുകളും ഇനിപ്പറയുന്ന പട്ടികയിൽ സംഗ്രഹിച്ചിരിക്കുന്നു.
| ക്ലാസിക്കൽ വേരിയൊ കണക്കുകൂട്ടൽ | HAWK കണക്കുകൂട്ടൽ | |
| നെറ്റോ | TEK_Vario+sink_rate(IAS,റോൾ_ആംഗിൾ) | നെറ്റോ |
| ആപേക്ഷികം (സൂപ്പർ നെറ്റോ) | TEK_Vario+sink_rate(IAS,roll_angle)- min_sink_rate | നെറ്റ്-മിനിറ്റ്_സിങ്ക്_റേറ്റ് |
| വേരിയോ | TEK വാരിയോ | Netto-sink_rate(IAS,roll_angle) |
7.6.4 AHRS ലെവലിംഗ്
![]() ഗ്ലൈഡറിന്റെ മാനുവലിൽ നിർവചിച്ചിരിക്കുന്ന രേഖാംശ അക്ഷവുമായി വിമാനം വിന്യസിച്ചിരിക്കുന്നത് തികച്ചും ആവശ്യമാണ്. ഏതെങ്കിലും തെറ്റായ ക്രമീകരണം HAWK അൽഗോരിതത്തിൽ വ്യവസ്ഥാപിത പിശകുകളിലേക്ക് നയിക്കുന്നു.
ഗ്ലൈഡറിന്റെ മാനുവലിൽ നിർവചിച്ചിരിക്കുന്ന രേഖാംശ അക്ഷവുമായി വിമാനം വിന്യസിച്ചിരിക്കുന്നത് തികച്ചും ആവശ്യമാണ്. ഏതെങ്കിലും തെറ്റായ ക്രമീകരണം HAWK അൽഗോരിതത്തിൽ വ്യവസ്ഥാപിത പിശകുകളിലേക്ക് നയിക്കുന്നു.
![]() HAWK അൽഗോരിതത്തിന് പിച്ച് ഓഫ്സെറ്റിന്റെ ±10° നഷ്ടപരിഹാരം നൽകാൻ കഴിയും. കൂടുതൽ ഓഫ്സെറ്റോടെയാണ് യൂണിറ്റ് ഗ്ലൈഡറിൽ ഇൻസ്റ്റാൾ ചെയ്തതെങ്കിൽ, HAWK അൽഗോരിതം ശരിയായി പ്രവർത്തിച്ചേക്കില്ല.
HAWK അൽഗോരിതത്തിന് പിച്ച് ഓഫ്സെറ്റിന്റെ ±10° നഷ്ടപരിഹാരം നൽകാൻ കഴിയും. കൂടുതൽ ഓഫ്സെറ്റോടെയാണ് യൂണിറ്റ് ഗ്ലൈഡറിൽ ഇൻസ്റ്റാൾ ചെയ്തതെങ്കിൽ, HAWK അൽഗോരിതം ശരിയായി പ്രവർത്തിച്ചേക്കില്ല.
ഇൻസ്റ്റാൾ ചെയ്ത ഉപകരണം ഗ്ലൈഡർ രേഖാംശ അക്ഷവുമായി പൂർണ്ണമായും വിന്യസിച്ചിട്ടില്ലെങ്കിൽ, ഒരു പിച്ച് അലൈൻമെന്റ് ചെയ്യേണ്ടത് അത്യാവശ്യമാണ്, ഇത് സെറ്റപ്പ്> ഹാർഡ്വെയർ> AHRS മെനുവിൽ ചെയ്യാൻ കഴിയും. ഗ്ലൈഡർ പൂജ്യം ഡിഗ്രി പിച്ച് പൊസിഷനിലേക്ക് ഇടുക, സാധാരണയായി ഇത് ഒരു വെയ്റ്റിംഗ് പൊസിഷനാണ്, ഈ മെനുവിലെ ലെവൽ ബട്ടൺ അമർത്തുക.
ഉപകരണം ഓട്ടോ-ലെവലിംഗ് നടപടിക്രമം നിർവഹിക്കുകയും സിസ്റ്റം പിച്ച് ഓഫ്സെറ്റ് കണക്കാക്കുകയും ചെയ്യും. കൂടുതൽ വിവരങ്ങൾക്ക് അദ്ധ്യായം 5.6.11.6 കാണുക.
7.6.5 HAWK പാരാമീറ്ററുകൾ
Setup>Vario Parameters മെനു വഴി HAWK പാരാമീറ്ററുകൾ സജ്ജീകരിക്കാം. വിശദാംശങ്ങൾക്ക് അധ്യായം 5.6.3 കാണുക. ഇനിപ്പറയുന്ന പാരാമീറ്ററുകൾ അവിടെ സജ്ജമാക്കാം:
- കാറ്റിന്റെ വ്യതിയാനം SIGWIND: പരിധി 0.005 മുതൽ 0.5 വരെ (ശുപാർശ ചെയ്യുന്ന മൂല്യം: 0.11). അധ്യായം 5.6.3.15 കാണുക.
- തിരശ്ചീന കാറ്റിന്റെ ശരാശരി: പരിധി 0.1 മുതൽ 100 സെക്കൻഡ് വരെ (ശുപാർശ ചെയ്യുന്ന മൂല്യം: 30 സെക്കൻഡ്). അധ്യായം 5.6.3.16 കാണുക.
- ലംബ കാറ്റിന്റെ ശരാശരി: പരിധി 0.1 മുതൽ 50 സെക്കൻഡ് വരെ (ശുപാർശ ചെയ്യുന്ന മൂല്യം: 10 സെക്കൻഡ്). അധ്യായം 5.6.3.17 കാണുക.
7.6.6 ഗ്രാഫിക്കൽ ഡിസ്പ്ലേ
HAWK സിസ്റ്റം ഉപയോഗിക്കുമ്പോൾ താഴെ പറയുന്ന ഡിസ്പ്ലേ ഓപ്ഷനുകൾ സജ്ജമാക്കാൻ ശുപാർശ ചെയ്യുന്നു.
സജ്ജീകരണം> ഗ്രാഫിക്സ്> ഇൻഡിക്കേറ്ററിൽ രണ്ട് സൂചികളും ദൃശ്യമാകുന്ന തരത്തിൽ സജ്ജമാക്കുക. HAWK മൂല്യങ്ങൾക്ക് നീല സൂചിയും TEK മൂല്യങ്ങൾക്ക് ചുവന്ന സൂചിയും സജ്ജമാക്കുക. vario സൂചി തരം vario അല്ലെങ്കിൽ relative ആയും SC നീഡിൽ തരം netto അല്ലെങ്കിൽ relative ആയും സജ്ജമാക്കുക.
വിശദാംശങ്ങൾക്ക് അദ്ധ്യായം 5.6.7.1.2 കാണുക.
7.6.7 ഓഡിയോ ഉറവിടം
HAWK ഓപ്ഷൻ സജീവമാകുമ്പോൾ, HAWK അല്ലെങ്കിൽ TE വേരിയോയ്ക്കിടയിൽ ഓഡിയോ ഉറവിടം തിരഞ്ഞെടുക്കാം. കൂടുതൽ വിവരങ്ങൾക്ക് അധ്യായം 5.6.8.2.5, 5.6.8.2.6 എന്നിവ കാണുക.
LXNAV SxHAWK പരമാവധി പ്രയോജനപ്പെടുത്തുന്നതിന്, പറന്നുയരുന്നതിന് മുമ്പ് ചില തയ്യാറെടുപ്പുകൾ നടത്തേണ്ടത് പ്രധാനമാണ്. പറക്കുമ്പോൾ ഉപകരണം കോൺഫിഗർ ചെയ്യാൻ ശ്രമിക്കുന്നത് വളരെ അപകടകരമാണ്, പ്രത്യേകിച്ച് ഒരു മത്സര സാഹചര്യത്തിൽ. പറക്കലിന് മുമ്പുള്ള തയ്യാറെടുപ്പ് ഫ്ലൈറ്റ് സുരക്ഷിതവും ആസ്വാദ്യകരവുമാണെന്ന് ഉറപ്പാക്കാൻ സഹായിക്കും.
8.1 ഗ്രൗണ്ടിൽ
8.1.1 പവർ ഓൺ നടപടിക്രമം
LXNAV SxHAWK ആരംഭിക്കാൻ ഏതെങ്കിലും റോട്ടറി ബട്ടണുകൾ അല്ലെങ്കിൽ പുഷ് ബട്ടണുകൾ അമർത്തുക. LXNAV SxHAWK സ്വാഗത സ്ക്രീൻ ദൃശ്യമാകും. ആദ്യ സ്ക്രീൻ ബൂട്ട് ലോഡറിന്റെ പതിപ്പ്, ഫേംവെയർ, ഹാർഡ്വെയർ, സീരിയൽ നമ്പർ എന്നിവ കാണിക്കുന്നു. ബൂട്ട് നടപടിക്രമം സാധാരണയായി കുറച്ച് സെക്കൻഡുകൾ എടുക്കും. പൂർത്തിയാകുമ്പോൾ സെറ്റ് എലവേഷൻ ഡയലോഗ് പ്രദർശിപ്പിക്കും.
8.1.2 സെറ്റ് എലവേഷനും ക്യുഎൻഎച്ച്
അന്തിമ ഗ്ലൈഡ് കണക്കുകൂട്ടലിന് ഈ ക്രമീകരണം നിർണായകമാണ്: അതിനാൽ ദയവായി ഇത് ശ്രദ്ധിക്കുക. 
സ്റ്റാൻഡേർഡ് പ്രഷർ ലെവൽ QNE-യേക്കാൾ എലവേഷൻ ഈ ഉപകരണം വാഗ്ദാനം ചെയ്യും. എലവേഷൻ ഫൈൻ ട്യൂൺ ചെയ്യാൻ നോബ് ഉപയോഗിക്കുക.
എയർഫീൽഡ് എലവേഷനും QNH മർദ്ദവും നൽകുമ്പോൾ മാത്രമേ QNH മാറ്റാവൂ. ചില മത്സരങ്ങളിൽ ഇത് സംഭവിച്ചേക്കാം.
മറ്റെല്ലാ സാഹചര്യങ്ങളിലും ഉയർച്ച എല്ലായ്പ്പോഴും QNH മർദ്ദവുമായി പൊരുത്തപ്പെടണം.
![]() പറക്കുന്നതിനിടയിൽ LXNAV SxHAWK ഓഫാക്കി ഓണാക്കിയാൽ സെറ്റ് എലവേഷൻ ഡയലോഗുകൾ കാണിക്കില്ല.
പറക്കുന്നതിനിടയിൽ LXNAV SxHAWK ഓഫാക്കി ഓണാക്കിയാൽ സെറ്റ് എലവേഷൻ ഡയലോഗുകൾ കാണിക്കില്ല.
![]() സെറ്റപ്പ്-QNH മെനുവിൽ ഫ്ലൈറ്റ് സമയത്തും QNH ശരിയാക്കാം.
സെറ്റപ്പ്-QNH മെനുവിൽ ഫ്ലൈറ്റ് സമയത്തും QNH ശരിയാക്കാം.
8.1.3 പ്രീ-ഫ്ലൈറ്റ് ചെക്ക്
എലവേഷൻ സജ്ജീകരണത്തിന് ശേഷം LXNAV SxHAWK സാധാരണ പ്രവർത്തന മോഡിനായി ഇൻഫോ സ്ക്രീനിലേക്ക് മാറും.
നിലവിലെ ഫ്ലൈറ്റിനായി MacCready, Ballast, Bugs ക്രമീകരണങ്ങൾ പ്രതീക്ഷിക്കുന്ന മൂല്യങ്ങളിലേക്ക് സജ്ജീകരിച്ചിട്ടുണ്ടോയെന്ന് പരിശോധിക്കുക.
MacCready, Ballast, Bugs മൂല്യങ്ങൾ പരിശോധിക്കുന്നതിനോ സജ്ജീകരിക്കുന്നതിനോ ഡയലോഗ് ബോക്സ് ഉയർത്താൻ ഈ സ്ക്രീനുകളിലേതെങ്കിലും താഴെയുള്ള റോട്ടറി ബട്ടൺ അമർത്തുക. ഏതെങ്കിലും ക്രമീകരണം പരിഷ്കരിക്കുന്നതിന് താഴെയുള്ള നോബ് തിരിക്കുക. അടുത്തതായി സുരക്ഷാ ഉയരം (ലക്ഷ്യസ്ഥാനത്തിന് മുകളിലുള്ള ഉയരം, എത്തിച്ചേരൽ ഉയരം) ക്രമീകരണം പരിശോധിക്കുക.
ഏതെങ്കിലും ക്രമീകരണം പരിഷ്കരിക്കുന്നതിന് താഴെയുള്ള നോബ് തിരിക്കുക. അടുത്തതായി സുരക്ഷാ ഉയരം (ലക്ഷ്യസ്ഥാനത്തിന് മുകളിലുള്ള ഉയരം, എത്തിച്ചേരൽ ഉയരം) ക്രമീകരണം പരിശോധിക്കുക.
ഇൻസ്റ്റലേഷൻ
LXNAV SxHAWK-യ്ക്ക് ഒരു സ്റ്റാൻഡേർഡ് 57 അല്ലെങ്കിൽ 80mm കട്ട്-ഔട്ട് ആവശ്യമാണ്.
SxHAWK യുടെ പിൻഭാഗത്ത് മൂന്ന് പ്രഷർ കണക്ടറുകൾ ഘടിപ്പിച്ചിരിക്കുന്നു. ഒരു ലേബൽ അവയുടെ പ്രവർത്തനങ്ങൾ കാണിക്കുന്നു:
- പിസ്റ്റാറ്റിക് എന്നാൽ സ്റ്റാറ്റിക് പ്രഷർ കണക്ടർ എന്നാണ് അർത്ഥമാക്കുന്നത്.
- ടോട്ടൽ എന്നാൽ പിറ്റോട്ട് അല്ലെങ്കിൽ മൊത്തം പ്രഷർ കണക്ടർ എന്നാണ് അർത്ഥമാക്കുന്നത്.
- TE എന്നാൽ മൊത്തം ഊർജ്ജ TE പ്രഷർ കണക്ടർ എന്നാണ് അർത്ഥമാക്കുന്നത്.
ഇലക്ട്രോണിക് TE നഷ്ടപരിഹാരത്തിനായി യൂണിറ്റ് കോൺഫിഗർ ചെയ്യണമെങ്കിൽ കണക്ഷനുകൾ ഇപ്രകാരമാണ്:
- പിസ്റ്റാറ്റിക് സ്റ്റാറ്റിക്
- ടോട്ടൽ പിറ്റോട്ട് അല്ലെങ്കിൽ ആകെ മർദ്ദം
- TE/Pstatic സ്റ്റാറ്റിക്

ഒരു TE ട്യൂബ് ഉപയോഗിച്ച് ന്യൂമാറ്റിക് TE നഷ്ടപരിഹാരത്തിനായി യൂണിറ്റ് കോൺഫിഗർ ചെയ്യണമെങ്കിൽ, കണക്ഷനുകൾ ഇവയാണ്:
- TE/Pstatic TE ട്യൂബ്
- പിസ്റ്റാറ്റിക് സ്റ്റാറ്റിക്
- ടോട്ടൽ പിറ്റോട്ട് അല്ലെങ്കിൽ ആകെ മർദ്ദം

![]() ടോട്ടലും സ്റ്റാറ്റിക്കും തെറ്റായ രീതിയിൽ ബന്ധിപ്പിച്ചിട്ടുണ്ടെങ്കിൽ, ഫ്ലൈറ്റിന്റെ സമയത്ത് ഇന്റഗ്രേറ്ററും (ശരാശരി കയറ്റം) വേഗതയും പറക്കാനുള്ള വേഗതയും ഉണ്ടാകില്ല.
ടോട്ടലും സ്റ്റാറ്റിക്കും തെറ്റായ രീതിയിൽ ബന്ധിപ്പിച്ചിട്ടുണ്ടെങ്കിൽ, ഫ്ലൈറ്റിന്റെ സമയത്ത് ഇന്റഗ്രേറ്ററും (ശരാശരി കയറ്റം) വേഗതയും പറക്കാനുള്ള വേഗതയും ഉണ്ടാകില്ല.
12-പിൻ SUB-D കണക്ടർ വഴി LXNAV SxHAWK 15 വോൾട്ട് പവർ സപ്ലൈയുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു. ഓപ്ഷണലായി LXNAV SxHAWKD യെ CAN ബസ് വഴി ബന്ധിപ്പിക്കാൻ കഴിയും, കൂടാതെ കണക്ടറുകളുടെ ഓരോ അറ്റത്തും "CAN" എന്ന് ലേബൽ ചെയ്തിരിക്കുന്നു.
![]() ഉപകരണത്തിന് ആന്തരിക ഫ്യൂസ് ഇല്ല. ഒരു 3A ബാഹ്യ ഫ്യൂസ് ആവശ്യമാണ്! വൈദ്യുതി വിതരണ കേബിളുകൾ കുറഞ്ഞത് 0.5 mm² വയറുകൾ ഉപയോഗിക്കണം.
ഉപകരണത്തിന് ആന്തരിക ഫ്യൂസ് ഇല്ല. ഒരു 3A ബാഹ്യ ഫ്യൂസ് ആവശ്യമാണ്! വൈദ്യുതി വിതരണ കേബിളുകൾ കുറഞ്ഞത് 0.5 mm² വയറുകൾ ഉപയോഗിക്കണം.
9.1 LXNAV SxHAWK ഇൻസ്റ്റാൾ ചെയ്യൽ
LXNAV SxHAWK വേരിയൊ ഒരു സ്റ്റാൻഡേർഡ് 80 mm ദ്വാരത്തിൽ ഘടിപ്പിക്കണം.  ഒരു കത്തിയോ ഫ്ലാറ്റ് സ്ക്രൂ ഡ്രൈവറോ ഉപയോഗിച്ച് രണ്ട് റോട്ടറി നോബ് ക്യാപ്പുകൾ നീക്കം ചെയ്യുക, തുടർന്ന് ഓരോ നോബും പിടിച്ച് അഴിക്കുക. ശേഷിക്കുന്ന രണ്ട് സ്ക്രൂകളും രണ്ട് M6 ത്രെഡ് നട്ടുകളും നീക്കം ചെയ്യുക. പാനലിലേക്ക് SxHAWK ഇൻസ്റ്റാൾ ചെയ്ത് എല്ലാ സ്ക്രൂകളും, നട്ടുകളും, നോബുകളും സ്ക്രൂ ചെയ്യുക. ബട്ടൺ അമർത്താൻ കഴിയുന്ന തരത്തിൽ നോബുകൾക്കും പാനലിനുമിടയിൽ മതിയായ ഇടമുണ്ടെന്ന് ഉറപ്പാക്കുക.
ഒരു കത്തിയോ ഫ്ലാറ്റ് സ്ക്രൂ ഡ്രൈവറോ ഉപയോഗിച്ച് രണ്ട് റോട്ടറി നോബ് ക്യാപ്പുകൾ നീക്കം ചെയ്യുക, തുടർന്ന് ഓരോ നോബും പിടിച്ച് അഴിക്കുക. ശേഷിക്കുന്ന രണ്ട് സ്ക്രൂകളും രണ്ട് M6 ത്രെഡ് നട്ടുകളും നീക്കം ചെയ്യുക. പാനലിലേക്ക് SxHAWK ഇൻസ്റ്റാൾ ചെയ്ത് എല്ലാ സ്ക്രൂകളും, നട്ടുകളും, നോബുകളും സ്ക്രൂ ചെയ്യുക. ബട്ടൺ അമർത്താൻ കഴിയുന്ന തരത്തിൽ നോബുകൾക്കും പാനലിനുമിടയിൽ മതിയായ ഇടമുണ്ടെന്ന് ഉറപ്പാക്കുക.
![]() LXNAV SxHAWK കോമ്പസിൽ നിന്ന് മതിയായ അകലെയാണ് സ്ഥിതി ചെയ്യുന്നതെന്ന് ഉറപ്പാക്കുക.
LXNAV SxHAWK കോമ്പസിൽ നിന്ന് മതിയായ അകലെയാണ് സ്ഥിതി ചെയ്യുന്നതെന്ന് ഉറപ്പാക്കുക.
![]() ENL സെൻസർ പ്രശ്നങ്ങൾ ഒഴിവാക്കാൻ, LXNAV SxHAWK വേരിയോ സ്പീക്കറിൽ നിന്ന് ആവശ്യത്തിന് അകലെയാണെന്ന് ഉറപ്പാക്കുക.
ENL സെൻസർ പ്രശ്നങ്ങൾ ഒഴിവാക്കാൻ, LXNAV SxHAWK വേരിയോ സ്പീക്കറിൽ നിന്ന് ആവശ്യത്തിന് അകലെയാണെന്ന് ഉറപ്പാക്കുക.
9.2 LXNAV SxHAWK ബന്ധിപ്പിക്കുന്നു
LXNAV SxHAWK 12V DC പവർ സപ്ലൈയുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു. ചുവന്ന വയർ + പോസിറ്റീവ് ആയും നീല വയർ – ഗ്രൗണ്ട് ആയും പോകുന്നു. നിങ്ങൾ (രണ്ടാമത്തെ സീറ്റ് യൂണിറ്റ്) അല്ലെങ്കിൽ മറ്റ് CAN പെരിഫെറലുകൾ ഉപയോഗിക്കുന്നില്ലെങ്കിൽ, CAN കണക്റ്റർ ഒരു CAN ടെർമിനേറ്റർ ഉപയോഗിച്ച് അവസാനിപ്പിക്കണം. ക്ലൈംബ് മോഡിനും ക്രൂയിസ് മോഡിനും ഇടയിൽ മാറാൻ ഉദ്ദേശിച്ചിട്ടുള്ള ബാഹ്യ സ്വിച്ചിനായി SC കേബിൾ ഉപയോഗിക്കുന്നു.
9.3 കട്ടൗട്ടുകൾ
9.3.1 SxHAWK-യുടെ കട്ട്-ഔട്ട്  9.3.2 SxHAWK 80MM-നുള്ള കട്ട്-ഔട്ട്
9.3.2 SxHAWK 80MM-നുള്ള കട്ട്-ഔട്ട് 
![]() സ്ക്രൂവിൻ്റെ നീളം പരമാവധി 4 മില്ലീമീറ്ററായി പരിമിതപ്പെടുത്തിയിരിക്കുന്നു!
സ്ക്രൂവിൻ്റെ നീളം പരമാവധി 4 മില്ലീമീറ്ററായി പരിമിതപ്പെടുത്തിയിരിക്കുന്നു!
9.4 FLARM, PDA പോർട്ടുകൾക്കുള്ള ലഭ്യമായ കേബിളുകൾ
ഫ്ലാർം പോർട്ട്
| ഉപകരണം | കേബിൾ കോഡ് |
| നാനോ പവർ | CC-NP-LX (RX/TX ക്രോസ് ചെയ്തിരിക്കുന്നു) |
| സ്ത്രീ DB232 ഉള്ള ജനറിക് RS9 | വി7-ജിപിഎസ്-232 |
| ഫ്ലൈറ്റ് റെക്കോർഡറുകൾ, സ്റ്റാൻഡേർഡ് 6p IGC കണക്റ്റർ RJ12 തരം, റെഡ് ബോക്സ്, കോളിബ്രി, കോളിബ്രി2, VL ഉള്ള FLARM-കൾ | V7-GPS-IGC |
| പവർഫ്ലാർം (RJ45), K6 മ്യൂക്സ് | V7-ജിപിഎസ്-പിഎഫ് |
| പവർഫ്ലാർം കോർ | V7-GPS-PFCORE |
PDA പോർട്ട്
| ഉപകരണം | കേബിൾ കോഡ് |
| ഊഡി | സിസി-എൻപി-ഔഡി1 |
| സ്ത്രീ DB232 ഉള്ള ജനറിക് RS9 | സിസി-എൻപി-232 |
| ഐപിഎക്യു 310/314 | സിസി-എൻപി-ഐപിഎക്യു310 |
| ഐപിഎക്യു 38/39xx/47xx | സിസി-എൻപി-38 |
| മിനിമാപ്പ് | സിസി-എൻപി-എൽഎക്സ് |
| ബട്ടർഫ്ലൈ കണക്ട് | സിസി-എൻപി-ബിഎഫ്സി |
![]() PDA, FLARM പോർട്ടുകൾ IGC മാനദണ്ഡങ്ങൾക്കനുസൃതമായി രൂപകൽപ്പന ചെയ്തിട്ടില്ല.
PDA, FLARM പോർട്ടുകൾ IGC മാനദണ്ഡങ്ങൾക്കനുസൃതമായി രൂപകൽപ്പന ചെയ്തിട്ടില്ല.
ഒരു പ്രത്യേക കേബിൾ ഉപയോഗിച്ച് മാത്രമേ അവ ഉപയോഗിക്കാൻ കഴിയൂ. LXNAV SxHAWK യൂണിറ്റിന് കേടുപാടുകൾ സംഭവിച്ചേക്കാവുന്നതിനാൽ അവയിലേക്ക് ഒരു അജ്ഞാത കേബിൾ പ്ലഗ് ചെയ്യരുത്.
9.5 ഓപ്ഷനുകളുടെ ഇൻസ്റ്റാളേഷൻ
LXNAV SxHAWK ഒരു രണ്ടാം സീറ്റ് റിപ്പീറ്റർ യൂണിറ്റ് LXNAV S2xD, റിമോട്ട് സ്റ്റിക്ക്, AHRS ഓപ്ഷനുകൾ എന്നിവയുമായി ബന്ധിപ്പിക്കാൻ കഴിയും.
 9.5.1.1 ഡാറ്റ എക്സ്ചേഞ്ച്
9.5.1.1 ഡാറ്റ എക്സ്ചേഞ്ച്
എല്ലാ ഡാറ്റയും ഫ്രണ്ട്, റിയർ യൂണിറ്റുകൾക്കിടയിൽ കൈമാറ്റം ചെയ്യപ്പെടുന്നു. LXNAV SxHAWK, FLARM, PDA എന്നിവയുമായും ഡാറ്റ കൈമാറ്റം ചെയ്യുന്നു. ഒരു PDA-യിലെ MC, ബാൽ, ബഗുകൾ, വോളിയം, പോളാർ ക്രമീകരണങ്ങൾ... എന്നിവയിലെ മാറ്റവും LXNAV SxHAWK-യെ സ്വാധീനിക്കും. വിപരീത ദിശയിലും ഇത് സംഭവിക്കും.
9.5.2 യൂണിവേഴ്സൽ ഫ്ലാപ്പ് സെൻസർ (ഫ്ലാപ്പ് – CAN, ഫ്ലാപ്പ് – 485)
യൂണിവേഴ്സൽ ഫ്ലാപ്പ് സെൻസറിന് രണ്ട് സ്വതന്ത്ര ഇന്റർഫേസുകളുണ്ട്, അവയ്ക്ക് ഒരേസമയം കാൻ, RS485 ബസ് എന്നിവ വഴി ആശയവിനിമയം നടത്താൻ കഴിയും. അതായത്, ഇത് ഒരേ സമയം SxHAWK, Lx9xxx എന്നിവയുമായി ബന്ധിപ്പിക്കാൻ കഴിയും.
അതിനായി നിങ്ങൾ UNI സ്പ്ലിറ്റർ ഓർഡർ ചെയ്യേണ്ടതുണ്ട്, അത് രണ്ട് നെറ്റ്വർക്കുകളിൽ (RS485 ഉം CAN ഉം) സിഗ്നലിനെ വിഭജിക്കും. RS485 ഭാഗം സാധാരണയായി RS485 സ്പ്ലിറ്റർ വഴി Lx9xxx ന്റെ RS 485 നെറ്റ്വർക്കിലേക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്നു, കൂടാതെ CAN ഭാഗം CAN Y സ്പ്ലിറ്റർ വഴി S വേരിയൊയുടെ CAN BUS നെറ്റ്വർക്കിലേക്ക് ബന്ധിപ്പിച്ചിരിക്കുന്നു.
9.5.3 MOP2-UNI
യൂണിവേഴ്സൽ MOP2 സെൻസറിന് രണ്ട് സ്വതന്ത്ര ഇന്റർഫേസുകളുണ്ട്, അവയ്ക്ക് ഒരേസമയം can, RS485 ബസ് വഴി ആശയവിനിമയം നടത്താൻ കഴിയും. അതായത്, ഇത് ഒരേ സമയം SxHAWK, Lx9xxx എന്നിവയിലേക്ക് ബന്ധിപ്പിക്കാൻ കഴിയും. അതിനായി നിങ്ങൾ UNI സ്പ്ലിറ്റർ ഓർഡർ ചെയ്യേണ്ടതുണ്ട്, ഇത് രണ്ട് നെറ്റ്വർക്കുകളിലെ (RS485, CAN) സിഗ്നലിനെ വിഭജിക്കും. RS485 ഭാഗം സാധാരണയായി RS485 സ്പ്ലിറ്റർ വഴി Lx9xxx ന്റെ RS485 നെറ്റ്വർക്കിലേക്കും CAN ഭാഗം CAN Y സ്പ്ലിറ്റർ വഴി S വേരിയൊയുടെ CAN BUS നെറ്റ്വർക്കിലേക്കും ബന്ധിപ്പിച്ചിരിക്കുന്നു.
9.5.4 റിമോട്ട് സ്റ്റിക്ക് (റിമോട്ട്-കാൻ)  റിമോട്ട് സ്റ്റിക്ക് CAN ബസുമായും ബന്ധിപ്പിച്ചിരിക്കുന്നു. SxHAWK-യിൽ റിമോട്ട് സ്റ്റിക്ക് രജിസ്റ്റർ ചെയ്യുന്നതിനായി ഒരു പ്രത്യേക മെനു നൽകിയിട്ടുണ്ട്. രണ്ട് സീറ്റുള്ള ഉപകരണമാണെങ്കിൽ ഉപകരണം രജിസ്റ്റർ ചെയ്തിരിക്കണം; രണ്ട് റിമോട്ട് സ്റ്റിക്കുകൾ ഉണ്ടാകാൻ സാധ്യതയുണ്ട്, ഒന്ന് മുൻവശത്തും മറ്റൊന്ന് പിൻവശത്തും രജിസ്റ്റർ ചെയ്തിരിക്കണം.
റിമോട്ട് സ്റ്റിക്ക് CAN ബസുമായും ബന്ധിപ്പിച്ചിരിക്കുന്നു. SxHAWK-യിൽ റിമോട്ട് സ്റ്റിക്ക് രജിസ്റ്റർ ചെയ്യുന്നതിനായി ഒരു പ്രത്യേക മെനു നൽകിയിട്ടുണ്ട്. രണ്ട് സീറ്റുള്ള ഉപകരണമാണെങ്കിൽ ഉപകരണം രജിസ്റ്റർ ചെയ്തിരിക്കണം; രണ്ട് റിമോട്ട് സ്റ്റിക്കുകൾ ഉണ്ടാകാൻ സാധ്യതയുണ്ട്, ഒന്ന് മുൻവശത്തും മറ്റൊന്ന് പിൻവശത്തും രജിസ്റ്റർ ചെയ്തിരിക്കണം.
പഴയ തരം റിമോട്ട് സ്റ്റിക്കുകളിൽ വയർഡ് SC ബട്ടൺ ഉണ്ട്, അത് വേരിയൊ ഇൻപുട്ടുകളിൽ ഒന്നിലേക്ക് ബന്ധിപ്പിക്കാൻ കഴിയും. പുതിയ തരത്തിൽ ഇപ്പോൾ ഈ കേബിൾ ഇല്ല, മുൻവശത്തെ SC ബട്ടണിന്റെ പ്രവർത്തനം സ്ഥിരമായി SC ടോഗിളിലേക്ക് സജ്ജീകരിച്ചിരിക്കുന്നു.
ഒരു റിമോട്ട് സ്റ്റിക്ക് രജിസ്റ്റർ ചെയ്യുന്നത് ഇനിപ്പറയുന്ന രീതിയിൽ ചെയ്യാം. റിമോട്ട് സ്റ്റിക്കിലെ ഏതെങ്കിലും ബട്ടൺ അമർത്തുക - ഈ രീതിയിൽ SxHAWK CAN BUS-ൽ റിമോട്ട് സ്റ്റിക്കിന്റെ സാന്നിധ്യം കണ്ടെത്തും. അതിനുശേഷം സെറ്റപ്പ്-ഹാർഡ്വെയർ-റിമോട്ടിന് കീഴിൽ പോയി റിമോട്ട് സ്റ്റിക്ക് രജിസ്റ്റർ ചെയ്യുക.
![]() ഒരു റിമോട്ട് സ്റ്റിക്ക് സ്ഥിരീകരിക്കാൻ, നിങ്ങൾ റിമോട്ട് സ്റ്റിക്കിലെ ശരി ബട്ടൺ അമർത്തണം.
ഒരു റിമോട്ട് സ്റ്റിക്ക് സ്ഥിരീകരിക്കാൻ, നിങ്ങൾ റിമോട്ട് സ്റ്റിക്കിലെ ശരി ബട്ടൺ അമർത്തണം.
SxHAWKD റിപ്പീറ്റർ യൂണിറ്റിനുള്ള രണ്ടാമത്തെ റിമോട്ട് ഉപയോഗിച്ചും ഇതുതന്നെയാണ് ചെയ്യുന്നത്. റിപ്പീറ്റർ യൂണിറ്റ് രജിസ്റ്റർ ചെയ്യുമ്പോൾ ഫ്രണ്ട് യൂണിറ്റ് രജിസ്റ്റർ മോഡിലല്ലെന്ന് ഉറപ്പാക്കുക, അല്ലാത്തപക്ഷം രണ്ട് യൂണിറ്റുകളും ഒരേ റിമോട്ട് സ്റ്റിക്ക് കേൾക്കും.
![]() CAN ബസ് എപ്പോഴും വൈദ്യുതിയിലാണ്, അതിനാൽ റിമോട്ട് സ്റ്റിക്കും വൈദ്യുതിയിലാണ്. പറന്നതിനുശേഷം ബാറ്ററികൾ ഡിസ്ചാർജ് ചെയ്യുന്നത് തടയാൻ ബാറ്ററികൾ വിച്ഛേദിക്കുകയോ മാസ്റ്റർ സ്വിച്ച് ഓഫ് ചെയ്യുകയോ ചെയ്യുക.
CAN ബസ് എപ്പോഴും വൈദ്യുതിയിലാണ്, അതിനാൽ റിമോട്ട് സ്റ്റിക്കും വൈദ്യുതിയിലാണ്. പറന്നതിനുശേഷം ബാറ്ററികൾ ഡിസ്ചാർജ് ചെയ്യുന്നത് തടയാൻ ബാറ്ററികൾ വിച്ഛേദിക്കുകയോ മാസ്റ്റർ സ്വിച്ച് ഓഫ് ചെയ്യുകയോ ചെയ്യുക.
9.6 പോർട്ടുകളും വയറിംഗും
9.6.1 LXNAV SxHAWK പോർട്ടുകൾ  9.6.1.1 PDA പോർട്ട് (RJ45)
9.6.1.1 PDA പോർട്ട് (RJ45)

| പിൻ നമ്പർ | വിവരണം |
| 1,2 | ഗ്രൗണ്ട് |
| 3 | (ഔട്ട്പുട്ട്) LXNAV SxHAWK-RS232-ൽ നിന്ന് ട്രാൻസ്മിറ്റ് ചെയ്യുക (ഉദാ. കമ്പ്യൂട്ടർ, IPAQ38/39xx) |
| 4 | (ഇൻപുട്ട്) LXNAV SxHAWK-RS232-ലേക്ക് സ്വീകരിക്കുക (ഉദാ. കമ്പ്യൂട്ടർ, IPAQ38/39xx) |
| 5 | (ഔട്ട്പുട്ട്) LXNAV SxHAWK LV-TTL (3.3V) ൽ നിന്ന് ട്രാൻസ്മിറ്റ് ചെയ്യുക (ഉദാ: Oudie, HP302, HP31x) |
| 6 | (ഇൻപുട്ട്) LXNAV SxHAWK LV-TTL (3.3V) ലേക്ക് സ്വീകരിക്കുക (ഉദാ. Oudie, HP302, HP31x) |
| 7,8 | 5V ഔട്ട്പുട്ട് (പരമാവധി 1A) |
![]() RS232 പിന്നുകളും TTL പിന്നുകളും ഒരേ സീരിയൽ പോർട്ട് ഉപയോഗിക്കുന്നതിനാൽ, ഒരേ സമയം രണ്ട് വ്യത്യസ്ത ഉപകരണങ്ങൾക്ക് അവ ഉപയോഗിക്കാൻ കഴിയില്ല.
RS232 പിന്നുകളും TTL പിന്നുകളും ഒരേ സീരിയൽ പോർട്ട് ഉപയോഗിക്കുന്നതിനാൽ, ഒരേ സമയം രണ്ട് വ്യത്യസ്ത ഉപകരണങ്ങൾക്ക് അവ ഉപയോഗിക്കാൻ കഴിയില്ല.
![]() RJ45 പ്ലഗ് IGC സ്റ്റാൻഡേർഡിന് അനുസൃതമായി രൂപകൽപ്പന ചെയ്തിട്ടില്ല. ഒരു പ്രത്യേക കേബിൾ ഉപയോഗിച്ച് മാത്രമേ ഇത് ഉപയോഗിക്കാൻ കഴിയൂ. LXNAV SXHAWK യൂണിറ്റിന് കേടുപാടുകൾ സംഭവിച്ചേക്കാവുന്നതിനാൽ ഒരു അജ്ഞാത കേബിൾ ഇതിലേക്ക് പ്ലഗ് ചെയ്യരുത്.
RJ45 പ്ലഗ് IGC സ്റ്റാൻഡേർഡിന് അനുസൃതമായി രൂപകൽപ്പന ചെയ്തിട്ടില്ല. ഒരു പ്രത്യേക കേബിൾ ഉപയോഗിച്ച് മാത്രമേ ഇത് ഉപയോഗിക്കാൻ കഴിയൂ. LXNAV SXHAWK യൂണിറ്റിന് കേടുപാടുകൾ സംഭവിച്ചേക്കാവുന്നതിനാൽ ഒരു അജ്ഞാത കേബിൾ ഇതിലേക്ക് പ്ലഗ് ചെയ്യരുത്.
9.6.1.2 ഫ്ലാം പോർട്ട് (RJ12) 
| പിൻ നമ്പർ | വിവരണം |
| 1 | (ഔട്ട്പുട്ട്) 12V DC, FLARM വിതരണം ചെയ്യാൻ (പരമാവധി 2A) |
| 2,3 | എൻ.സി |
| 4 | (ഇൻപുട്ട്) LXNAV SxHAWK-RS232-ലേക്ക് സ്വീകരിക്കുക (ഉദാ: NANO പവർ 232) |
| 5 | (ഔട്ട്പുട്ട്) LXNAV SxHAWK-RS232 ൽ നിന്ന് ട്രാൻസ്മിറ്റ് ചെയ്യുക (ഉദാ: നാനോ പവർ 232) |
| 6 | ഗ്രൗണ്ട് |
9.6.1.3 പ്രധാന തുറമുഖം
SXHAWK-യെ പ്രധാന വയറിംഗ് ലൂമിലേക്ക് ബന്ധിപ്പിക്കാൻ പ്രധാന പോർട്ട് ഉപയോഗിക്കുന്നു.
9.6.1.4 ഓഡിയോ പോർട്ട്
വിതരണം ചെയ്ത സ്പീക്കർ ഒരു സ്റ്റാൻഡേർഡ് 3mm ഫോണോ ജാക്കുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു. ഓഡിയോ ampലിഫയർ ക്ലാസ് ഡി ആണ് ampലിഫയർ. ഇത് ആധുനികമാണ് ampകുറഞ്ഞ വൈദ്യുതി ഉപഭോഗം, ഉയർന്ന ശബ്ദ നിലവാരം എന്നിവയുള്ള ലിഫയർ.
![]() ഈ പോർട്ട് SxHAWK-യ്ക്കൊപ്പം നൽകിയിട്ടുള്ള ഒരു 8-ഓം സ്പീക്കറുമായി ബന്ധിപ്പിക്കുന്നതിനാണ് രൂപകൽപ്പന ചെയ്തിരിക്കുന്നത്. മറ്റൊരു കണക്ഷൻ സ്ഥാപിക്കണമെങ്കിൽ ദയവായി നിങ്ങളുടെ ഡീലറുമായി ബന്ധപ്പെടുക.
ഈ പോർട്ട് SxHAWK-യ്ക്കൊപ്പം നൽകിയിട്ടുള്ള ഒരു 8-ഓം സ്പീക്കറുമായി ബന്ധിപ്പിക്കുന്നതിനാണ് രൂപകൽപ്പന ചെയ്തിരിക്കുന്നത്. മറ്റൊരു കണക്ഷൻ സ്ഥാപിക്കണമെങ്കിൽ ദയവായി നിങ്ങളുടെ ഡീലറുമായി ബന്ധപ്പെടുക.
![]() ക്ലാസ് ഡി ampലിഫയറുകൾ ഒരു പിന്നുകളും നിലവുമായി ബന്ധിപ്പിക്കാൻ അനുവദിക്കുന്നില്ല.
ക്ലാസ് ഡി ampലിഫയറുകൾ ഒരു പിന്നുകളും നിലവുമായി ബന്ധിപ്പിക്കാൻ അനുവദിക്കുന്നില്ല.
വയറിംഗുകൾ
9.6.1.5LXNAV SxHAWK വയറിംഗ് 
![]() ഒരു CAN BUS കേബിൾ ഒരു LXNAV SxHAWKD-യിലേക്ക് ബന്ധിപ്പിച്ചിട്ടില്ലെങ്കിൽ, CAN കണക്റ്റർ ഒരു CAN ടെർമിനേറ്റർ ഉപയോഗിച്ച് അവസാനിപ്പിക്കണം!
ഒരു CAN BUS കേബിൾ ഒരു LXNAV SxHAWKD-യിലേക്ക് ബന്ധിപ്പിച്ചിട്ടില്ലെങ്കിൽ, CAN കണക്റ്റർ ഒരു CAN ടെർമിനേറ്റർ ഉപയോഗിച്ച് അവസാനിപ്പിക്കണം!
9.6.1.6 LXNAV S10xD വയറിംഗ് 
![]() പിൻ സീറ്റ് ഉപകരണം ആദ്യ സീറ്റ് ഉപകരണത്തിൽ നിന്നാണ് പ്രവർത്തിക്കുന്നത്.
പിൻ സീറ്റ് ഉപകരണം ആദ്യ സീറ്റ് ഉപകരണത്തിൽ നിന്നാണ് പ്രവർത്തിക്കുന്നത്.
9.7 SxHAWK കോൺഫിഗറേഷനുകൾ
9.7.1 ചിഹ്നങ്ങൾ  9.7.2 ഫ്ലാംമൗസ് - SxHAWK - ഔഡി
9.7.2 ഫ്ലാംമൗസ് - SxHAWK - ഔഡി  9.7.3 ഫ്ലാംമൗസ് – SxHAWK – ഔഡി – ഫ്ലാപ്സ് സെൻസർ
9.7.3 ഫ്ലാംമൗസ് – SxHAWK – ഔഡി – ഫ്ലാപ്സ് സെൻസർ  9.7.4 ഫ്ലാംമൗസ് – SxHAWK – ഔഡി – മോപ്പ് സെൻസർ
9.7.4 ഫ്ലാംമൗസ് – SxHAWK – ഔഡി – മോപ്പ് സെൻസർ 9.7.5 ഫ്ലാംമൗസ് – നാനോ3 – SxHAWK – ഔഡി
9.7.5 ഫ്ലാംമൗസ് – നാനോ3 – SxHAWK – ഔഡി  പവർമൗസ് + (നാനോ3) – SxHAWK – ഔഡി
പവർമൗസ് + (നാനോ3) – SxHAWK – ഔഡി

9.7.6 സ്ക്സ്ഹോക്ക്– സ്ക്സ്10 എക്സ്ഡി 
9.7.7 SxHAWK– ഫ്ലാം UNI/MOP UNI –(LX80xx/90xx) 
9.7.8 ഒരു LXxxxxx ലേക്കുള്ള SxHAWK വേരിയോ കണക്ഷൻ
PDA പോർട്ട് ഉള്ള എല്ലാ LXNAV സ്റ്റാൻഡ്-എലോൺ വേരിയൊകളും ഒരു LXxxxx സിസ്റ്റവുമായി ബന്ധിപ്പിക്കാൻ കഴിയും. ഏറ്റവും വലിയ അഡ്വാൻസ്tagLXxxxx ൽ നിന്ന് സ്റ്റാൻഡ്-എലോൺ വേരിയോട്ടിലേക്ക് ടാസ്ക്കുകൾ പ്രഖ്യാപിക്കാനുള്ള കഴിവാണ് അവയെ ബന്ധിപ്പിക്കുന്നതിന്റെ ഒരു പ്രധാന ഘടകം. ആവശ്യമായ കേബിളുകളും അഡാപ്റ്ററുകളും ഇവയാണ്: LX5FL, CC-NP-LX, FlarmSplitter. FlarmSplitter-ൽ ദ്വിദിശ ആശയവിനിമയത്തിനായി RX/TX പോർട്ടുകൾ മാത്രം ഉപയോഗിക്കുക.
ഓപ്ഷൻ 2: LX5-SVAR ഉപയോഗിച്ച് 5pin കണക്ടറിൽ SxHAWK GPS പോർട്ടിൽ നിന്ന് LXxxxxx ലേക്ക്. (Oudie അല്ലെങ്കിൽ മറ്റ് PDA ഉപകരണം കണക്റ്റുചെയ്യാൻ PDA പോർട്ട് സൗജന്യമാണ്) ഈ കോൺഫിഗറേഷൻ ഉദാ. ഉപയോഗിക്കുന്നുampOudie, LXxxxx എന്നിവയ്ക്കൊപ്പം നിങ്ങളുടെ Sxx വേരിയൊ ഉപയോഗിക്കുമ്പോൾ le. LX5-SVAR GPS പോർട്ടിലേക്കും CC-NP-OUDIE കേബിൾ PDA പോർട്ടിലേക്കും ബന്ധിപ്പിച്ചിരിക്കുന്നു.
ഈ കോൺഫിഗറേഷൻ ഉദാ. ഉപയോഗിക്കുന്നുampOudie, LXxxxx എന്നിവയ്ക്കൊപ്പം നിങ്ങളുടെ Sxx വേരിയൊ ഉപയോഗിക്കുമ്പോൾ le. LX5-SVAR GPS പോർട്ടിലേക്കും CC-NP-OUDIE കേബിൾ PDA പോർട്ടിലേക്കും ബന്ധിപ്പിച്ചിരിക്കുന്നു. ഓപ്ഷൻ 3: 5pin കണക്ടറിൽ SxHAWK PDA മുതൽ LXxxxx വരെ (GPS പോർട്ടിലേക്ക് ബാഹ്യ ഫ്ലാം ബന്ധിപ്പിക്കാൻ കഴിയും)
ഓപ്ഷൻ 3: 5pin കണക്ടറിൽ SxHAWK PDA മുതൽ LXxxxx വരെ (GPS പോർട്ടിലേക്ക് ബാഹ്യ ഫ്ലാം ബന്ധിപ്പിക്കാൻ കഴിയും)  ഈ കോൺഫിഗറേഷൻ ഉദാ. ഉപയോഗിക്കുന്നുampനിങ്ങളുടെ Sxx വേരിയൊ LXxxxx ഉം Flarm ഉപകരണവും (ഉദാ: FlarmMouse) ഉപയോഗിക്കുമ്പോൾ le. LX5-PDA PDA പോർട്ടിലേക്കും ബാഹ്യ ഫ്ലാം FLARM പോർട്ടിലേക്കും ബന്ധിപ്പിച്ചിരിക്കുന്നു.
ഈ കോൺഫിഗറേഷൻ ഉദാ. ഉപയോഗിക്കുന്നുampനിങ്ങളുടെ Sxx വേരിയൊ LXxxxx ഉം Flarm ഉപകരണവും (ഉദാ: FlarmMouse) ഉപയോഗിക്കുമ്പോൾ le. LX5-PDA PDA പോർട്ടിലേക്കും ബാഹ്യ ഫ്ലാം FLARM പോർട്ടിലേക്കും ബന്ധിപ്പിച്ചിരിക്കുന്നു.
![]() LXxxxx-ൽ നിന്ന് MC/BAL/BUGS അയയ്ക്കുന്നത് പ്രവർത്തനക്ഷമമാക്കാൻ നിങ്ങൾ LXWP2 വാക്യം പ്രവർത്തനക്ഷമമാക്കേണ്ടതുണ്ട്. S-vario-ൽ നിന്ന് MC/BAL/BUGS സ്വീകരിക്കുന്നത് ഇപ്പോൾ പിന്തുണയ്ക്കുന്നില്ല.
LXxxxx-ൽ നിന്ന് MC/BAL/BUGS അയയ്ക്കുന്നത് പ്രവർത്തനക്ഷമമാക്കാൻ നിങ്ങൾ LXWP2 വാക്യം പ്രവർത്തനക്ഷമമാക്കേണ്ടതുണ്ട്. S-vario-ൽ നിന്ന് MC/BAL/BUGS സ്വീകരിക്കുന്നത് ഇപ്പോൾ പിന്തുണയ്ക്കുന്നില്ല.
![]() എക്സ്റ്റേണൽ ഫ്ളാം എസ്-വാരിയോയുമായി ബന്ധിപ്പിച്ചിട്ടുണ്ടെങ്കിൽ, ടാസ്ക് ഫ്ലാറിലേക്കും ഫോർവേഡ് ചെയ്യാം (ഐജിസി ഓപ്ഷനോടെ).
എക്സ്റ്റേണൽ ഫ്ളാം എസ്-വാരിയോയുമായി ബന്ധിപ്പിച്ചിട്ടുണ്ടെങ്കിൽ, ടാസ്ക് ഫ്ലാറിലേക്കും ഫോർവേഡ് ചെയ്യാം (ഐജിസി ഓപ്ഷനോടെ).
![]() ടാസ്ക് എഡിറ്റ് മോഡിൽ ആയിരിക്കുമ്പോൾ, ടാസ്ക് എഡിറ്റ് ചെയ്തതിനു ശേഷവും ശരി ബട്ടൺ അമർത്തിയതിനു ശേഷവും ടാസ്ക് പ്രഖ്യാപനം സ്വയമേവ നടപ്പിലാക്കും. ദയവായി LXWP1, LXWP2 NMEA വാക്യങ്ങൾ പ്രവർത്തനക്ഷമമാക്കുക.
ടാസ്ക് എഡിറ്റ് മോഡിൽ ആയിരിക്കുമ്പോൾ, ടാസ്ക് എഡിറ്റ് ചെയ്തതിനു ശേഷവും ശരി ബട്ടൺ അമർത്തിയതിനു ശേഷവും ടാസ്ക് പ്രഖ്യാപനം സ്വയമേവ നടപ്പിലാക്കും. ദയവായി LXWP1, LXWP2 NMEA വാക്യങ്ങൾ പ്രവർത്തനക്ഷമമാക്കുക.
![]() മക്ക്രീഡി, ബാലസ്റ്റ്, ബഗ്സ് ക്രമീകരണങ്ങളും കൈമാറ്റം ചെയ്യപ്പെടുന്നു, പക്ഷേ LXxxxx -> Sxx എന്ന ദിശയിലേക്ക് മാത്രം. നിങ്ങളുടെ Sxx ഉപകരണത്തിൽ ഈ ക്രമീകരണം എഡിറ്റ് ചെയ്താൽ, അവ LXxxxx യൂണിറ്റിലേക്ക് കൈമാറ്റം ചെയ്യപ്പെടില്ല.
മക്ക്രീഡി, ബാലസ്റ്റ്, ബഗ്സ് ക്രമീകരണങ്ങളും കൈമാറ്റം ചെയ്യപ്പെടുന്നു, പക്ഷേ LXxxxx -> Sxx എന്ന ദിശയിലേക്ക് മാത്രം. നിങ്ങളുടെ Sxx ഉപകരണത്തിൽ ഈ ക്രമീകരണം എഡിറ്റ് ചെയ്താൽ, അവ LXxxxx യൂണിറ്റിലേക്ക് കൈമാറ്റം ചെയ്യപ്പെടില്ല.
![]() SC/VARIO മോഡ് LXxxxx-ൽ നിന്ന് SxHAWK-ലേക്ക് മാറ്റാനും കഴിയും. SxHAWK വശത്ത് SC/VAR സ്വിച്ചിംഗ് പ്രാപ്തമാക്കുന്നതിന്, നിങ്ങൾ അത് setup/vario/Auto SC to NMEA ഇൻപുട്ടിന് കീഴിൽ സജ്ജമാക്കണം.
SC/VARIO മോഡ് LXxxxx-ൽ നിന്ന് SxHAWK-ലേക്ക് മാറ്റാനും കഴിയും. SxHAWK വശത്ത് SC/VAR സ്വിച്ചിംഗ് പ്രാപ്തമാക്കുന്നതിന്, നിങ്ങൾ അത് setup/vario/Auto SC to NMEA ഇൻപുട്ടിന് കീഴിൽ സജ്ജമാക്കണം.
9.8 ഡാറ്റ കൈമാറ്റം
9.8.1 സ്ക്സ്ഹോക്ക്
| ഡാറ്റ കൈമാറ്റം/നടപടി | പരാമർശം | |||
| സ്ക്സ്ഹോക്ക് | ←Скачать по видео (എഴുത്തുകാരൻ) | എൽഎക്സ്എക്സ്എക്സ് | എംസി/ബാലസ്റ്റ്/ബഗുകൾ; എഎൽടി; ടിഎസ്കെ പ്രഖ്യാപനം; പൈലറ്റ് പ്രഖ്യാപനം, എസ്സി സ്വിച്ചിംഗ് | |
| സ്ക്സ്ഹോക്ക് | ↔ | ഔഡി / ഔഡി ബിടി | എംസി/ബാലസ്റ്റ്/ബഗുകൾ; എഎൽടി; ടിഎസ്കെ
പ്രഖ്യാപനം; പൈലറ്റ് പ്രഖ്യാപനം |
|
| സ്ക്സ്ഹോക്ക് | → | ഫ്ലാർം | ടാസ്ക് പ്രഖ്യാപനം | |
| സ്ക്സ്ഹോക്ക് | → | നാനോ / നാനോ3 | ടി.എസ്.കെ പ്രഖ്യാപനം | |
| സ്ക്സ്ഹോക്ക്,
ബി.ടി.യും |
↔ | എക്സ് സി സോർ | എംസി/ബാലസ്റ്റ്/ബഗുകൾ; എഎൽടി; ടിഎസ്കെ പ്രഖ്യാപനം; പൈലറ്റ് പ്രഖ്യാപനം |
9.8.2 മറ്റ് ഡാറ്റാ കൈമാറ്റങ്ങൾ
| ഡാറ്റ കൈമാറ്റം/നടപടി | പരാമർശം | |||
| ഫ്ലാർം | → | എക്സ് സി സോർ / ഔഡി | വിമാന കൈമാറ്റം | നേരിട്ടുള്ള ലിങ്ക് വഴി |
| എക്സ് സി സോർ/ഔഡി | → | ഫ്ലാർം | ടാസ്ക് പ്രഖ്യാപനം | നേരിട്ടുള്ള ലിങ്ക് വഴി |
| നാനോ/നാനോ3 | → | എക്സ്സിസോർ / ഔഡി | ടാസ്ക് ഡിക്ലറേഷൻ, ഫ്ലൈറ്റ് ഡൗൺലോഡ്? | നേരിട്ടുള്ള ലിങ്ക് വഴി |
ഫേംവെയർ അപ്ഡേറ്റ്
പ്രധാന ഡിസ്പ്ലേ ഇൻഡിക്കേറ്ററിനും വേരിയോ യൂണിറ്റിനുമുള്ള ഫേംവെയർ അപ്ഡേറ്റുകൾ മൈക്രോ–എസ്ഡി കാർഡ് ഉപയോഗിച്ച് എളുപ്പത്തിൽ നടപ്പിലാക്കാൻ കഴിയും. ദയവായി ഞങ്ങളുടെ സന്ദർശിക്കുക webപേജ് www.lxnav.com ഒപ്പം ഫേംവെയർ അപ്ഡേറ്റ് ഡൗൺലോഡ് ചെയ്യുക.
സിസ്റ്റത്തെക്കുറിച്ചുള്ള വാർത്തകൾ സ്വയമേവ സ്വീകരിക്കുന്നതിന് നിങ്ങൾക്ക് ഒരു വാർത്താക്കുറിപ്പ് സബ്സ്ക്രൈബുചെയ്യാനും കഴിയും.
10.1 മൈക്രോ എസ്ഡി കാർഡ് ഉപയോഗിച്ച് LXNAV SxHAWK ഫേംവെയർ അപ്ഡേറ്റ് ചെയ്യുന്നു
ഫേംവെയർ ZFW പകർത്തുക file SD കാർഡിൽ ടൈപ്പ് ചെയ്ത് ഉപകരണത്തിലേക്ക് ഇൻസേർട്ട് ചെയ്യുക. SxHAWK നിങ്ങളോട് അപ്ഡേറ്റ് ചെയ്യാൻ ആവശ്യപ്പെടും. സ്ഥിരീകരണത്തിന് ശേഷം ഫേംവെയർ അപ്ഡേറ്റ് സ്വയമേവ നടപ്പിലാക്കും.
![]() ആദ്യ സീറ്റ് അപ്ഡേറ്റ് ചെയ്യുമ്പോൾ പിൻ സീറ്റ് ഉപകരണം യാന്ത്രികമായി അപ്ഡേറ്റ് ചെയ്യപ്പെടുന്നില്ല, അതിനാൽ ഇത് പ്രത്യേകം അപ്ഡേറ്റ് ചെയ്യേണ്ടതുണ്ട്.
ആദ്യ സീറ്റ് അപ്ഡേറ്റ് ചെയ്യുമ്പോൾ പിൻ സീറ്റ് ഉപകരണം യാന്ത്രികമായി അപ്ഡേറ്റ് ചെയ്യപ്പെടുന്നില്ല, അതിനാൽ ഇത് പ്രത്യേകം അപ്ഡേറ്റ് ചെയ്യേണ്ടതുണ്ട്.
10.2 അപൂർണ്ണമായ അപ്ഡേറ്റ് സന്ദേശം
നിങ്ങൾക്ക് അപൂർണ്ണമായ ഒരു അപ്ഡേറ്റ് സന്ദേശം ലഭിക്കുകയാണെങ്കിൽ, നിങ്ങൾ ZFW ഫേംവെയർ അൺസിപ്പ് ചെയ്യേണ്ടതുണ്ട് file കൂടാതെ ഉള്ളടക്കം SD കാർഡിലേക്ക് പകർത്തുക. ഇത് യൂണിറ്റിലേക്ക് തിരുകുക, പവർ ഓണാക്കുക.
നിങ്ങൾക്ക് ZFW അൺസിപ്പ് ചെയ്യാൻ കഴിയുന്നില്ലെങ്കിൽ file, ദയവായി ആദ്യം ZIP എന്ന് പുനർനാമകരണം ചെയ്യുക.
ZFW file 3 അടങ്ങിയിരിക്കുന്നു files:
- V8xc.fw
- V8xc_init.bin-ൽ നിന്ന്
- ആപ്പ്_NINC_XX.lxfw
V8xc_init.bin നഷ്ടപ്പെട്ടാൽ, "അപൂർണ്ണമായ അപ്ഡേറ്റ് ..." എന്ന സന്ദേശം ദൃശ്യമാകും.

പതിവുചോദ്യങ്ങൾ
1. IGC എങ്ങനെ സംരക്ഷിക്കാം? file?
ലോഗ്ബുക്ക് പേജിലേക്ക് പോയി, നിങ്ങൾക്ക് താൽപ്പര്യമുള്ള ഫ്ലൈറ്റ് തിരഞ്ഞെടുക്കുക, താഴെയുള്ള റോട്ടറി ബട്ടണിൽ ഹ്രസ്വമായി അമർത്തി ഫ്ലൈറ്റ് മൈക്രോ-എസ്ഡി കാർഡിലേക്ക് ഡൗൺലോഡ് ചെയ്യുക.
2. ഒരു iPad/iPhone/മറ്റ് iOS ഉപകരണം എന്നിവയുമായി ഇന്റർഫേസ് ചെയ്യാൻ കഴിയുമോ?
അതെ, ബ്ലൂടൂത്ത് വഴി. BT ഉപകരണം BT ലിസ്റ്റിൽ ദൃശ്യമായേക്കില്ല. ആപ്പ് പ്രവർത്തിപ്പിച്ച് അവിടെ BT ഉപകരണം കണ്ടെത്തുക.
3. വിമാനത്തിൽ ഘടിപ്പിച്ചിരിക്കുമ്പോൾ യഥാർത്ഥ യൂണിറ്റ് എങ്ങനെ ചാർജ് ചെയ്യുമെന്ന് എനിക്ക് മനസ്സിലാകുന്നില്ല?
ഉപകരണത്തിനൊപ്പം വിതരണം ചെയ്യുന്ന പ്രധാന പവർ കേബിൾ വഴി.
4. മാസ്റ്റർ സ്വിച്ചിനും ബാറ്ററിക്കും ഇടയിൽ ഫ്യൂസ് ഇടേണ്ടതുണ്ടോ?
അതെ, ഒരു 3A ഫ്യൂസ് ഉപയോഗിക്കുക.
5. (ഇപ്പോൾ സൗജന്യമാണ്) PDA പോർട്ടിന്റെ 3 പിൻ 4800 ബോഡിൽ ADSB ഡാറ്റയും ഒരു ട്രാൻസ്പോണ്ടറിലേക്ക് NMEA ഫിൽട്ടറും (GPRMC മാത്രം) നൽകുന്നതിന് കോൺഫിഗർ ചെയ്യാൻ കഴിയുമോ?
ഇല്ല, PDA പോർട്ട് ഞങ്ങളുടെ സ്റ്റാൻഡേർഡാണ്, അത് ഒരിക്കലും മാറ്റില്ല. ഒരു ട്രാൻസ്പോണ്ടറിന് ഞങ്ങൾക്ക് ഒരു NMEA ബ്രിഡ്ജ് നൽകാൻ കഴിയും.
6. ഔഡിയുമായി ബന്ധപ്പെട്ട ബ്ലൂടൂത്ത് കണക്ഷന് PDA പോർട്ടിന്റെ എല്ലാ പ്രവർത്തനങ്ങളും ഉണ്ടോ?
അതെ.
7. പഴയ ഫ്ലാറ്റ് FLARM ബോക്സ് FLARM പോർട്ടുമായി ബന്ധിപ്പിക്കാൻ കഴിയുമോ?
അതെ
![]() പൈലറ്റിന്റെ തിരഞ്ഞെടുപ്പ്
പൈലറ്റിന്റെ തിരഞ്ഞെടുപ്പ്
LXNAV do0.
കിദ്രീവ 24, SI-3000 സെൽജെ, സ്ലോവേനിയ
ടി: +386 592 334 00
എഫ്:+386 599 335 22
ഇൻഫോ@ഇക്സ്നവ്.കോം
www.ഇക്സ്നാവ്.കോം
പ്രമാണങ്ങൾ / വിഭവങ്ങൾ
 |
lxnav SxHAWK ഡിജിറ്റൽ സ്പീഡ് ടു ഫ്ലൈ HAWK വേരിയോമീറ്റർ [pdf] ഉപയോക്തൃ മാനുവൽ SxHAWK ഡിജിറ്റൽ സ്പീഡ് ടു ഫ്ലൈ HAWK വേരിയോമീറ്റർ, ഡിജിറ്റൽ സ്പീഡ് ടു ഫ്ലൈ HAWK വേരിയോമീറ്റർ, ഫ്ലൈ HAWK വേരിയോമീറ്റർ, വേരിയോമീറ്റർ |