Netzer DS-25 17 ബിറ്റ് റെസല്യൂഷൻ സമ്പൂർണ്ണ എൻകോഡർ

മുഖവുര
- പതിപ്പ് 2.0: നവംബർ 2021
ബാധകമായ രേഖകൾ
- DS-25 ഇലക്ട്രിക് എൻകോഡർ ഡാറ്റാഷീറ്റ്
ESD സംരക്ഷണം
ഇലക്ട്രോണിക് സർക്യൂട്ടുകൾക്ക് പതിവുപോലെ, ഉൽപ്പന്നം കൈകാര്യം ചെയ്യുമ്പോൾ അനുയോജ്യമായ ESD പരിരക്ഷയില്ലാതെ ഇലക്ട്രോണിക് സർക്യൂട്ടുകൾ, വയറുകൾ, കണക്ടറുകൾ അല്ലെങ്കിൽ സെൻസറുകൾ എന്നിവ സ്പർശിക്കരുത്. സർക്യൂട്ട് കേടാകാനുള്ള സാധ്യത ഒഴിവാക്കാൻ ഇന്റഗ്രേറ്റർ/ഓപ്പറേറ്റർ ESD ഉപകരണങ്ങൾ ഉപയോഗിക്കും.
ശ്രദ്ധ
ഇലക്ട്രോസ്റ്റാറ്റിക് സെൻസിറ്റീവ് ഉപകരണങ്ങൾ കൈകാര്യം ചെയ്യുന്നതിനുള്ള മുൻകരുതലുകൾ നിരീക്ഷിക്കുക
ഉൽപ്പന്നം കഴിഞ്ഞുview
കഴിഞ്ഞുview
DS-25 സമ്പൂർണ്ണ സ്ഥാനം ഇലക്ട്രിക് എൻകോഡർ™ ഒരു വിപ്ലവകരമായ പൊസിഷൻ സെൻസറാണ്, കഠിനമായ പരിസ്ഥിതി നിർണായക ആപ്ലിക്കേഷനുകൾക്കായി വികസിപ്പിച്ചെടുത്തതാണ്. നിലവിൽ, പ്രതിരോധം, ഹോംലാൻഡ് സെക്യൂരിറ്റി, എയ്റോസ്പേസ്, മെഡിക്കൽ, ഇൻഡസ്ട്രിയൽ ഓട്ടോമേഷൻ എന്നിവയുൾപ്പെടെ വിപുലമായ ആപ്ലിക്കേഷനുകളിൽ ഇത് പ്രവർത്തിക്കുന്നു. വൈദ്യുത എൻകോഡർ™ നോൺ-കോൺടാക്റ്റ് സാങ്കേതികവിദ്യ അളന്ന സ്ഥാനചലനവും ഇടം/സമയം മോഡുലേറ്റ് ചെയ്ത വൈദ്യുത മണ്ഡലവും തമ്മിലുള്ള പ്രതിപ്രവർത്തനത്തെ ആശ്രയിച്ചിരിക്കുന്നു. DS-25 ഇലക്ട്രിക് എൻകോഡർ™ സെമി മോഡുലാർ ആണ്, അതായത്, അതിന്റെ റോട്ടറും സ്റ്റേറ്ററും വെവ്വേറെയാണ്, സ്റ്റേറ്റർ റോട്ടറിനെ സുരക്ഷിതമായി ഉൾക്കൊള്ളുന്നു.
- എൻകോഡർ സ്റ്റേറ്റർ
- എൻകോഡർ റോട്ടർ
- എൻകോഡർ മൗണ്ടിംഗ് clamps
- റോട്ടർ ഫാസ്റ്റനർ
- കേബിൾ ഇൻ്റർഫേസ്

ഇൻസ്റ്റലേഷൻ ഫ്ലോ ചാർട്ട്
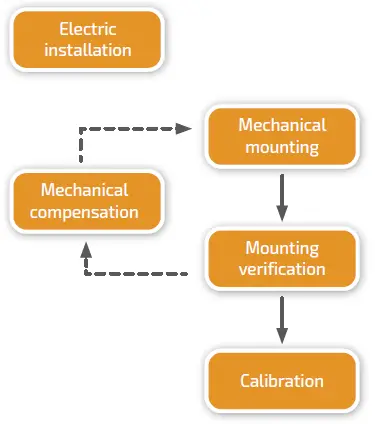
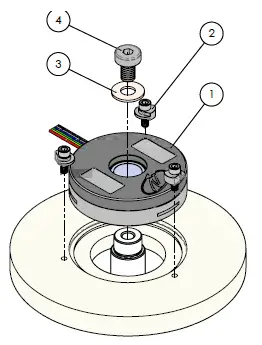
എൻകോഡർ മൗണ്ടിംഗ്
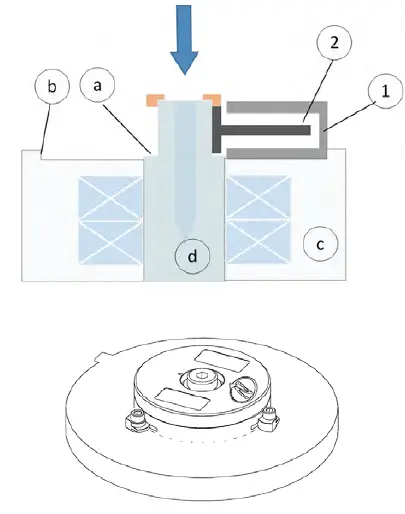
എൻകോഡർ റോട്ടർ (2) ഒരു സമർപ്പിത തോളിൽ (a), ഒരു സ്ക്രൂ, ഒരു വാഷർ അല്ലെങ്കിൽ ഒരു വാഷർ അല്ലെങ്കിൽ വൃത്താകൃതിയിലുള്ള സ്പ്രിംഗ്, മർദ്ദം നിലനിർത്താൻ തോളിൻറെ അറ്റത്തുള്ള വാഷർ എന്നിവയിൽ അമർത്തി ഹോസ്റ്റ് ഷാഫ്റ്റിൽ (d) ഘടിപ്പിക്കുന്നു, ശുപാർശ ചെയ്യുന്ന ശക്തി 0.3 Nm. M3 സ്ക്രൂ ഉപയോഗിച്ച്.
എൻകോഡർ സ്റ്റേറ്റർ (1) ചുറ്റളവ് ഘട്ടം (ബി) ഉപയോഗിച്ച് കേന്ദ്രീകരിച്ച് മൂന്ന് എൻകോഡർ cl ഉപയോഗിച്ച് ഹോസ്റ്റ് സ്റ്റേറ്ററിലേക്ക് (c) ഘടിപ്പിച്ചിരിക്കുന്നുamps, വിതരണം ചെയ്ത എൻകോഡറിനൊപ്പം 0.3 Nm ന്റെ ബലം ശുപാർശ ചെയ്യുന്നുamps.
കുറിപ്പ്:
Ultem നിർമ്മിച്ച സെൻസർ ബോഡിയുമായി ആക്രമണാത്മകമായി ഇടപഴകുന്ന Cyanoacrylate അടങ്ങിയ സ്ക്രൂ-ലോക്കിംഗ് മെറ്റീരിയലുകൾ ഉപയോഗിക്കരുത്.
എൻകോഡർ സ്റ്റേറ്റർ/റോട്ടർ ആപേക്ഷിക സ്ഥാനം
റോട്ടർ ഫ്ലോട്ടിംഗ് ആണ്, അതിനാൽ, ഷാഫ്റ്റ് ഷോൾഡറിനും (ബി) സ്റ്റേറ്റർ മൗണ്ടിംഗ് ഇടവേളയ്ക്കും (എ) ഇടയിലുള്ള ശരിയായ ആപേക്ഷിക അക്ഷീയ മൗണ്ടിംഗ് ദൂരം "എച്ച്" 1.4 മിമി നാമമാത്രമായിരിക്കണം.
റോട്ടർ ഷിമ്മുകൾ വഴി മെക്കാനിക്കൽ മൗണ്ടിംഗ് നഷ്ടപരിഹാരം എളുപ്പമാക്കുന്നതിന്, ശുപാർശ ചെയ്യുന്ന ദൂരം 1.4 - 0.05 മില്ലിമീറ്ററാണ്, ഇത് അനലോഗ് ഔട്ട്പുട്ട് നൽകുന്നു. ഒപ്റ്റിമൽ ശുപാർശ ചെയ്യുന്നു ampഎൻകോഡർ എക്സ്പ്ലോറർ സോഫ്റ്റ്വെയറിൽ കാണിച്ചിരിക്കുന്നതനുസരിച്ച് ലിറ്റ്യൂഡ് മൂല്യങ്ങൾ ശ്രേണിയുടെ മധ്യമാണ്, എൻകോഡർ തരം അനുസരിച്ച് വ്യത്യാസപ്പെടുന്നു.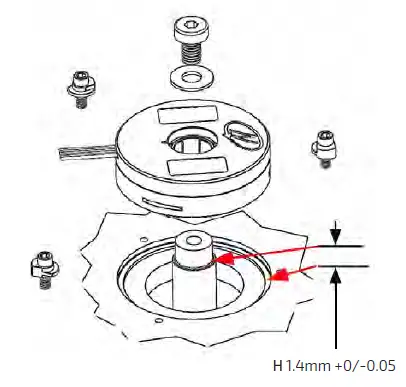
DS-25 amplitudes നഷ്ടപരിഹാരം
റോട്ടറിന് താഴെയുള്ള 50 um ഷിമ്മുകൾ (DS-25-R-00 കിറ്റായി ലഭ്യമാണ്) ഉപയോഗിച്ച് മെക്കാനിക്കൽ നഷ്ടപരിഹാരം വർദ്ധിപ്പിക്കും. ampലിറ്റ്യൂഡ് ലെവൽ ~ 50mV. എൻകോഡർ എക്സ്പ്ലോറർ ടൂളുകൾ "സിഗ്നൽ അനലൈസർ" അല്ലെങ്കിൽ "മെക്കാനിക്കൽ ഇൻസ്റ്റാളേഷൻ പരിശോധന" ഉപയോഗിച്ച് ശരിയായ റോട്ടർ മൗണ്ടിംഗ് പരിശോധിക്കുക.
കുറിപ്പ്: കൂടുതൽ വിവരങ്ങൾക്ക് ദയവായി ഖണ്ഡിക 6 വായിക്കുക
അൺപാക്ക് ചെയ്യുന്നു
സ്റ്റാൻഡേർഡ് ഓർഡർ
സ്റ്റാൻഡേർഡ് DS-25-ന്റെ പാക്കേജിൽ 250mm ഷിൽഡഡ് കേബിൾ AWG30, EAPK004 കിറ്റ് എൻകോഡർ മൗണ്ടിംഗ് cl എന്നിവയുള്ള എൻകോഡർ അടങ്ങിയിരിക്കുന്നു.amps, (3 clamps, 0-80 UNF HEX സോക്കറ്റ് സ്ക്രൂ L 3/16”, SS )
ഓപ്ഷണൽ ആക്സസറികൾ:
- DS-25-R-00, റോട്ടർ ഷിംസ് കിറ്റ് (x10 സ്റ്റെയിൻലെസ് സ്റ്റീൽ ഷിംസ്, 50um വീതം)
- MA-DS25-004, ഷാഫ്റ്റ് എൻഡ് ഇൻസ്റ്റലേഷൻ കിറ്റ് (M3x5 സ്ക്രൂ + വാഷർ)
- CNV-00003, RS-422 to USB കൺവെർട്ടർ (സെറ്റപ്പ് മോഡ്)
- NanoMIC-KIT-01, RS-422-ലേക്ക് USB കൺവെർട്ടർ. SSi /BiSS ഇന്റർഫേസ് വഴിയുള്ള സജ്ജീകരണവും പ്രവർത്തന രീതികളും.
- DKIT-DS-25-SF-S0, റോട്ടറി ജിഗിൽ മൗണ്ടഡ് SSi എൻകോഡർ, RS-422 മുതൽ USB കൺവെർട്ടർ, കേബിളുകൾ.
- DKIT-DS-25-IF-S0, റോട്ടറി ജിഗിൽ മൗണ്ടഡ് BiSS എൻകോഡർ, RS-422 മുതൽ USB കൺവെർട്ടർ, കേബിളുകൾ.
ഇലക്ട്രിക്കൽ ഇന്റർകണക്ഷൻ
ഈ അധ്യായം റീviewഡിജിറ്റൽ ഇന്റർഫേസുമായി (SSi അല്ലെങ്കിൽ BiSS-C) എൻകോഡറിനെ വൈദ്യുതമായി ബന്ധിപ്പിക്കുന്നതിന് ആവശ്യമായ ഘട്ടങ്ങൾ.
എൻകോഡർ ബന്ധിപ്പിക്കുന്നു
എൻകോഡറിന് രണ്ട് പ്രവർത്തന രീതികളുണ്ട്:
SSi അല്ലെങ്കിൽ BiSS-C യുടെ സമ്പൂർണ്ണ സ്ഥാനം:
ഇതാണ് പവർ-അപ്പ് ഡിഫോൾട്ട് മോഡ്
SSi / BiSS ഇന്റർഫേസ് വയറുകളുടെ കളർ കോഡ്
| ക്ലോക്ക് + | ചാരനിറം |
ക്ലോക്ക് |
| ക്ലോക്ക് - | നീല | |
| ഡാറ്റ - | മഞ്ഞ |
ഡാറ്റ |
| ഡാറ്റ + | പച്ച | |
| ജിഎൻഡി | കറുപ്പ് | ഗ്രൗണ്ട് |
| +5V | ചുവപ്പ് | വൈദ്യുതി വിതരണം |
എൻസിപി (നെറ്റ്സർ കമ്മ്യൂണിക്കേഷൻ പ്രോട്ടോക്കോൾ) വഴിയുള്ള സജ്ജീകരണ മോഡ്
Netzer Encoder Explorer ആപ്ലിക്കേഷനിൽ (MS Windows 7/10-ൽ) പ്രവർത്തിക്കുന്ന PC-ലേക്ക് ഈ സേവന മോഡ് USB വഴി ആക്സസ് നൽകുന്നു. ആശയവിനിമയം Netzer കമ്മ്യൂണിക്കേഷൻ പ്രോട്ടോക്കോൾ (NCP) വഴി RS-422 വഴി ഒരേ സെറ്റ് വയറുകൾ ഉപയോഗിക്കുന്നു. RS-9/USB കൺവെർട്ടറായ CNV-422 അല്ലെങ്കിൽ NanoMIC ലേക്ക് 0003-പിൻ D-ടൈപ്പ് കണക്റ്ററിലേക്ക് എൻകോഡറിനെ ബന്ധിപ്പിക്കുന്നതിന് ഇനിപ്പറയുന്ന പിൻ അസൈൻമെന്റ് ഉപയോഗിക്കുക.
ഇലക്ട്രിക് എൻകോഡർ ഇന്റർഫേസ്, D ടൈപ്പ് 9 പിൻ ഫീമെയിൽ
| വിവരണം | നിറം | ഫംഗ്ഷൻ | പിൻ നമ്പർ |
|
SSi ക്ലോക്ക് / NCP RX |
ചാരനിറം | ക്ലോക്ക് / RX + | 2 |
| നീല | ക്ലോക്ക് / RX - | 1 | |
|
SSi ഡാറ്റ / NCP TX |
മഞ്ഞ | ഡാറ്റ / TX – | 4 |
| പച്ച | ഡാറ്റ / TX + | 3 | |
| ഗ്രൗണ്ട് | കറുപ്പ് | ജിഎൻഡി | 5 |
| വൈദ്യുതി വിതരണം | ചുവപ്പ് | +5V | 8 |
ഇലക്ട്രിക്കൽ കണക്ഷനും ഗ്രൗണ്ടിംഗും
എൻകോഡർ ഒരു നിർദ്ദിഷ്ട കേബിളും കണക്ടറും കൊണ്ട് വരുന്നില്ല, എന്നിരുന്നാലും, അടിസ്ഥാന പരിഗണനകൾ നിരീക്ഷിക്കുക:
- കേബിൾ ഷീൽഡ് വൈദ്യുതി വിതരണ റിട്ടേൺ ലൈനിലേക്ക് ബന്ധിപ്പിക്കുന്നില്ല.
- ഹോസ്റ്റ് സിസ്റ്റത്തിൽ നിന്നുള്ള ഇടപെടൽ ഒഴിവാക്കാൻ ഹോസ്റ്റ് ഷാഫ്റ്റ് ഗ്രൗണ്ട് ചെയ്യുക, ഇത് എൻകോഡർ ആന്തരിക ശബ്ദത്തിന് കാരണമാകാം.
കുറിപ്പ്: 4.75 മുതൽ 5.25 വരെ VDC വൈദ്യുതി ആവശ്യമാണ്
സോഫ്റ്റ്വെയർ ഇൻസ്റ്റാളേഷൻ
ഇലക്ട്രിക് എൻകോഡർ എക്സ്പ്ലോറർ (EEE) സോഫ്റ്റ്വെയർ:
- മെക്കാനിക്കൽ മൗണ്ടിംഗ് കൃത്യത പരിശോധിക്കുന്നു
- ഓഫ്സെറ്റ് കാലിബ്രേഷൻ
- പൊതുവായതും സിഗ്നൽ വിശകലനവും സജ്ജമാക്കുന്നു
ഈ അധ്യായം റീviewEEE സോഫ്റ്റ്വെയർ ആപ്ലിക്കേഷൻ ഇൻസ്റ്റാൾ ചെയ്യുന്നതുമായി ബന്ധപ്പെട്ട ഘട്ടങ്ങൾ.
ഏറ്റവും കുറഞ്ഞ ആവശ്യകതകൾ
- ഓപ്പറേറ്റിംഗ് സിസ്റ്റം: MS വിൻഡോസ് 7/ 10,(32/64 ബിറ്റ്)
- മെമ്മറി: കുറഞ്ഞത് 4MB
- ആശയവിനിമയ തുറമുഖങ്ങൾ: USB 2
- Windows .NET ഫ്രെയിംവർക്ക്, കുറഞ്ഞത് V4
സോഫ്റ്റ്വെയർ ഇൻസ്റ്റാൾ ചെയ്യുന്നു
- ഇലക്ട്രിക് എൻകോഡർ™ എക്സ്പ്ലോറർ പ്രവർത്തിപ്പിക്കുക file Netzer ൽ കണ്ടെത്തി webസൈറ്റ്: എൻകോഡർ എക്സ്പ്ലോറർ സോഫ്റ്റ്വെയർ ടൂളുകൾ
- ഇൻസ്റ്റാളേഷന് ശേഷം, കമ്പ്യൂട്ടർ ഡെസ്ക്ടോപ്പിൽ നിങ്ങൾ ഇലക്ട്രിക് എൻകോഡർ എക്സ്പ്ലോറർ സോഫ്റ്റ്വെയർ ഐക്കൺ കാണും.
- ആരംഭിക്കുന്നതിന് ഇലക്ട്രിക് എൻകോഡർ എക്സ്പ്ലോറർ സോഫ്റ്റ്വെയർ ഐക്കണിൽ ക്ലിക്ക് ചെയ്യുക.
മൗണ്ടിംഗ് സ്ഥിരീകരണം
എൻകോഡർ എക്സ്പ്ലോറർ ആരംഭിക്കുന്നു
ഇനിപ്പറയുന്ന ജോലികൾ വിജയകരമായി പൂർത്തിയാക്കുന്നത് ഉറപ്പാക്കുക:
- മെക്കാനിക്കൽ മൗണ്ടിംഗ്
- വൈദ്യുതി ബന്ധം
- കാലിബ്രേഷനായി എൻകോഡർ ബന്ധിപ്പിക്കുന്നു
- എൻകോഡർ സോഫ്റ്റ്വെയർ ഇൻസ്റ്റാളേഷൻ പര്യവേക്ഷണം ചെയ്യുക
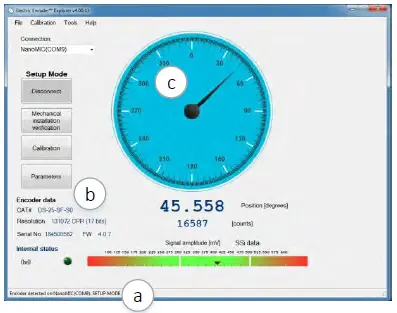
ഇലക്ട്രിക് എൻകോഡർ എക്സ്പ്ലോറർ ടൂൾ (EEE) പ്രവർത്തിപ്പിക്കുക
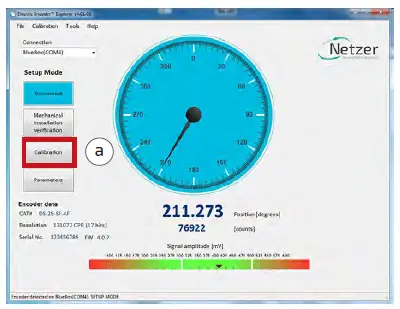
എൻകോഡറുമായി ശരിയായ ആശയവിനിമയം ഉറപ്പാക്കുക: (ഡിഫോൾട്ടായി സജ്ജീകരണ മോഡ്).
- സ്റ്റാറ്റസ് ബാർ വിജയകരമായ ആശയവിനിമയത്തെ സൂചിപ്പിക്കുന്നു.
- എൻകോഡർ ഡാറ്റ ഏരിയയിൽ എൻകോഡർ ഡാറ്റ പ്രദർശിപ്പിക്കുന്നു. (CAT നമ്പർ, സീരിയൽ നമ്പർ.)
- പൊസിഷൻ ഡയൽ ഡിസ്പ്ലേ ഷാഫ്റ്റ് റൊട്ടേഷനോട് പ്രതികരിക്കുന്നു.
ഒപ്റ്റിമൽ പെർഫോമൻസ് ഉറപ്പാക്കാൻ കാലിബ്രേഷന് മുമ്പ് മൗണ്ടിംഗ് വെരിഫിക്കേഷനും റൊട്ടേഷൻ ദിശ തിരഞ്ഞെടുക്കലും നടത്തുക. [ടൂൾസ് - സിഗ്നൽ അനലൈസർ] വിൻഡോയിൽ ഇൻസ്റ്റലേഷൻ നിരീക്ഷിക്കാനും ഇത് ശുപാർശ ചെയ്യുന്നു.മെക്കാനിക്കൽ ഇൻസ്റ്റാളേഷൻ പരിശോധന
മെക്കാനിക്കൽ ഇൻസ്റ്റലേഷൻ വെരിഫിക്കേഷൻ ഒരു നടപടിക്രമം നൽകുന്നു, അത് റൊട്ടേഷൻ സമയത്ത് മികച്ചതും പരുക്കൻതുമായ ചാനലുകളുടെ അസംസ്കൃത ഡാറ്റ ശേഖരിച്ച് ശരിയായ മെക്കാനിക്കൽ മൗണ്ടിംഗ് ഉറപ്പാക്കുന്നു. - പ്രധാന സ്ക്രീനിൽ [മെക്കാനിക്കൽ മൗണ്ടിംഗ് സ്ഥിരീകരണം] തിരഞ്ഞെടുക്കുക.

- ഡാറ്റ ശേഖരണം ആരംഭിക്കാൻ [ആരംഭിക്കുക] തിരഞ്ഞെടുക്കുക.
- മികച്ചതും പരുക്കൻതുമായ ചാനലുകളുടെ ഡാറ്റ ശേഖരിക്കുന്നതിന് ഷാഫ്റ്റ് തിരിക്കുക.
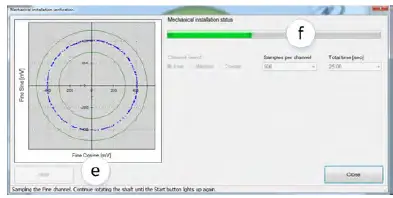
- വിജയകരമായ പരിശോധനയുടെ അവസാനം, SW "ശരിയായ മെക്കാനിക്കൽ ഇൻസ്റ്റാളേഷൻ" കാണിക്കും.
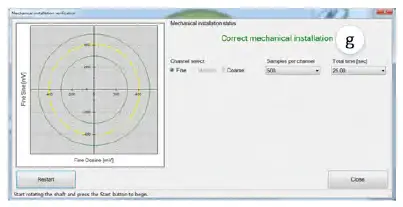
- SW സൂചിപ്പിക്കുന്നത് "തെറ്റായ മെക്കാനിക്കൽ ഇൻസ്റ്റാളേഷൻ" ആണെങ്കിൽ, ഖണ്ഡിക 3.3-ൽ അവതരിപ്പിച്ചിരിക്കുന്നതുപോലെ റോട്ടറിന്റെ മെക്കാനിക്കൽ സ്ഥാനം ശരിയാക്കുക - "റോട്ടർ ആപേക്ഷിക സ്ഥാനം."

കാലിബ്രേഷൻ
പുതിയ സവിശേഷത
യാന്ത്രിക കാലിബ്രേഷൻ ഓപ്ഷൻ പ്രവർത്തനക്ഷമമാക്കി. പ്രമാണം റഫർ ചെയ്യുക: Auto-calibration-feature-user-manual-V01
ഓഫ്സെറ്റ് കാലിബ്രേഷൻ
ഇലക്ട്രിക് എൻകോഡറുകളുടെ ഒപ്റ്റിമൽ പ്രകടനത്തിന്, സൈൻ, കോസൈൻ സിഗ്നലുകളുടെ അനിവാര്യമായ ഡിസി ഓഫ്സെറ്റ് പ്രവർത്തനമേഖലയിൽ നഷ്ടപരിഹാരം നൽകണം.
മൗണ്ടിംഗ് സ്ഥിരീകരണ നടപടിക്രമം വിജയകരമായി പൂർത്തിയാക്കിയ ശേഷം:
- പ്രധാന സ്ക്രീനിൽ [കാലിബ്രേഷൻ] തിരഞ്ഞെടുക്കുക.
- ഷാഫ്റ്റ് തിരിക്കുമ്പോൾ ഡാറ്റ ഏറ്റെടുക്കൽ ആരംഭിക്കുക. പുരോഗതി ബാർ (സി) ശേഖരണ പുരോഗതിയെ സൂചിപ്പിക്കുന്നു. ഡാറ്റാ ശേഖരണ വേളയിൽ സ്ഥിരമായി അച്ചുതണ്ട് തിരിക്കുക-ആപ്ലിക്കേഷന്റെ പ്രവർത്തന മേഖലയെ കവർ ചെയ്യുക-ഡിഫോൾട്ടായി 500 സെക്കൻഡിനുള്ളിൽ നടപടിക്രമം 75 പോയിന്റുകൾ ശേഖരിക്കുന്നു. ഡാറ്റാ ശേഖരണ സമയത്ത് റൊട്ടേഷൻ വേഗത ഒരു പാരാമീറ്ററല്ല. മികച്ച/ പരുക്കൻ ചാനലുകൾക്കായുള്ള ഡാറ്റ ശേഖരണ സൂചന കാണിക്കുന്നു, കുറച്ച് ഓഫ്സെറ്റിനൊപ്പം മധ്യത്തിൽ (ഡി) (ഇ) ഒരു വ്യക്തമായ “നേർത്ത” വൃത്തം ദൃശ്യമാകുന്നു.
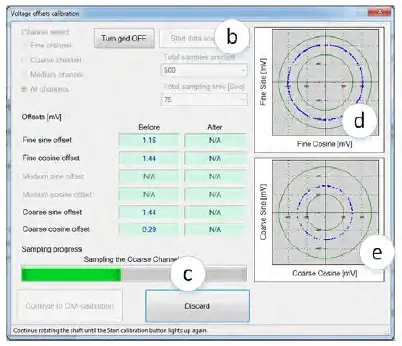
നഷ്ടപരിഹാരം നൽകിയ പിഴ / കോർസ് ചാനൽ ഓഫ്സെറ്റ് 
CAA കാലിബ്രേഷൻ
ഇനിപ്പറയുന്ന കാലിബ്രേഷൻ രണ്ട് ചാനലുകളുടെയും ഓരോ പോയിന്റിൽ നിന്നും ഡാറ്റ ശേഖരിക്കുന്നതിലൂടെ പരുക്കൻ/സുന്ദരമായ ചാനലിനെ വിന്യസിക്കുന്നു. CAA ആംഗിൾ കാലിബ്രേഷൻ വിൻഡോയിൽ [CAA കാലിബ്രേഷൻ തുടരുക] തിരഞ്ഞെടുക്കുക, അളക്കൽ ശ്രേണി ഓപ്ഷനുകളിൽ നിന്ന് പ്രസക്തമായ ഓപ്ഷൻ ബട്ടൺ തിരഞ്ഞെടുക്കുക (a):
- പൂർണ്ണ മെക്കാനിക്കൽ റൊട്ടേഷൻ - ഷാഫ്റ്റിന്റെ ചലനം 10 ഡിഗ്രിയിൽ കൂടുതലാണ് - ശുപാർശ ചെയ്യുന്നു.
- ലിമിറ്റഡ് സെക്ഷൻ - <10deg ആണെങ്കിൽ ഡിഗ്രി കൊണ്ട് നിർവചിച്ചിരിക്കുന്ന പരിമിതമായ കോണിൽ ഷാഫ്റ്റിന്റെ പ്രവർത്തനം നിർവ്വചിക്കുക
- സ്വതന്ത്ര എസ്ampലിംഗ് മോഡുകൾ - ടെക്സ്റ്റ് ബോക്സിലെ മൊത്തം പോയിന്റുകളുടെ എണ്ണത്തിൽ കാലിബ്രേഷൻ പോയിന്റുകളുടെ എണ്ണം നിർവചിക്കുക. സിസ്റ്റം ഡിഫോൾട്ടായി ശുപാർശ ചെയ്യുന്ന പോയിന്റുകളുടെ എണ്ണം പ്രദർശിപ്പിക്കുന്നു. പ്രവർത്തന മേഖലയെക്കാൾ കുറഞ്ഞത് ഒമ്പത് പോയിന്റുകൾ ശേഖരിക്കുക.
- [കാലിബ്രേഷൻ ആരംഭിക്കുക] ബട്ടൺ ക്ലിക്ക് ചെയ്യുക (ബി)
- സ്റ്റാറ്റസ് (സി) അടുത്ത ആവശ്യമായ പ്രവർത്തനത്തെ സൂചിപ്പിക്കുന്നു; ഷാഫ്റ്റ് ചലന നില; നിലവിലെ സ്ഥാനവും എൻകോഡർ തിരിക്കേണ്ട അടുത്ത ലക്ഷ്യ സ്ഥാനവും.
- ഷാഫ്റ്റ്/എൻകോഡർ അടുത്ത സ്ഥാനത്തേക്ക് തിരിക്കുക, [തുടരുക] ബട്ടൺ ക്ലിക്കുചെയ്യുക (സി)
- ഡാറ്റ ശേഖരണ സമയത്ത് ഷാഫ്റ്റ് നിശ്ചലമായിരിക്കണം. ഷാഫ്റ്റിന്റെ സ്ഥാനം -> നിശ്ചലമായി നിൽക്കുക -> റീഡിംഗ് കണക്കുകൂട്ടലിനായി സൈക്ലിക് പ്രക്രിയയ്ക്കിടെയുള്ള സൂചനകൾ/ഇടരാക്ഷനുകൾ പിന്തുടരുക.
- എല്ലാ നിർവ്വചിച്ച പോയിന്റുകൾക്കും മുകളിലുള്ള ഘട്ടം ആവർത്തിക്കുക. പൂർത്തിയാക്കുക (d)
- [സംരക്ഷിച്ച് തുടരുക] ബട്ടൺ ക്ലിക്ക് ചെയ്യുക (ഇ).
അവസാന ഘട്ടം ഓഫ്സെറ്റുകൾ CAA പാരാമീറ്ററുകൾ സംരക്ഷിക്കുന്നു, കാലിബ്രേഷൻ പ്രക്രിയ പൂർത്തിയാക്കുന്നു.
എൻകോഡർ സീറോ പോയിന്റ് സജ്ജീകരിക്കുന്നു
ജോലി ചെയ്യുന്ന മേഖലയിൽ എവിടെയും പൂജ്യം സ്ഥാനം നിർവചിക്കാം. ആവശ്യമുള്ള പൂജ്യം മെക്കാനിക്കൽ സ്ഥാനത്തേക്ക് ഷാഫ്റ്റ് തിരിക്കുക. മുകളിലെ മെനു ബാറിലെ "കാലിബ്രേഷൻ" ബട്ടണിലേക്ക് പോയി "UZP സജ്ജമാക്കുക" അമർത്തുക. പ്രസക്തമായ ഓപ്ഷൻ ഉപയോഗിച്ച് "നിലവിലെ സ്ഥാനം സജ്ജീകരിക്കുക" പൂജ്യമായി തിരഞ്ഞെടുത്ത് [പൂർത്തിയാക്കുക] ക്ലിക്ക് ചെയ്യുക.
ജിറ്റർ ടെസ്റ്റ്
ഇൻസ്റ്റാളേഷന്റെ ഗുണനിലവാരം വിലയിരുത്തുന്നതിന് ഒരു ജിറ്റർ ടെസ്റ്റ് നടത്തുക; ജിറ്റർ ടെസ്റ്റ് കാലക്രമേണ കേവല സ്ഥാന റീഡിംഗുകളുടെ (എണ്ണം) വായന സ്ഥിതിവിവരക്കണക്കുകൾ അവതരിപ്പിക്കുന്നു. സാധാരണ വിറയൽ +/- 3 എണ്ണം ആയിരിക്കണം; ഉയർന്ന ഇളക്കം സിസ്റ്റം ശബ്ദത്തെ സൂചിപ്പിക്കാം.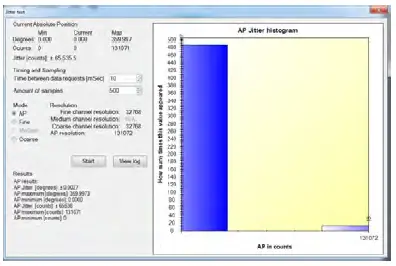
വായനാ ഡാറ്റ (നീല ഡോട്ടുകൾ) ഒരു നേർത്ത വൃത്തത്തിൽ തുല്യമായി വിതരണം ചെയ്യപ്പെടുന്നില്ലെങ്കിൽ, നിങ്ങളുടെ ഇൻസ്റ്റാളേഷനിൽ "ശബ്ദം" അനുഭവപ്പെട്ടേക്കാം (ഷാഫ്റ്റ്/സ്റ്റേറ്റർ ഗ്രൗണ്ടിംഗ് പരിശോധിക്കുക).
പ്രവർത്തന മോഡ്
SSi/BiSS
NanoMIC ഉപയോഗിച്ച് ലഭ്യമായ SSi / BiSS എൻകോഡർ ഇന്റർഫേസിന്റെ പ്രവർത്തന മോഡ് സൂചന. കൂടുതൽ വിവരങ്ങൾക്ക് Netzer-ലെ NanoMIC-നെ കുറിച്ച് വായിക്കുക webസൈറ്റ് പ്രവർത്തന മോഡ് "യഥാർത്ഥ" SSi / BiSS ഇന്റർഫേസ് 1MHz ക്ലോക്ക് നിരക്കിൽ അവതരിപ്പിക്കുന്നു.
പ്രോട്ടോക്കോൾ SSi
പ്രോട്ടോക്കോൾ BiSS

മെക്കാനിക്കൽ ഡ്രോയിംഗുകൾ

മറ്റുതരത്തിൽ വ്യക്തമാക്കപ്പെടുന്നതുവരെ
| അളവുകൾ: mm | ഉപരിതല ഫിനിഷ്: N6 |
ലീനിയർ ടോളറൻസുകൾ
| 0.5-4.9: ± 0.05 മിമി | 5-30: ± 0.1 മിമി |
| 31-120: ± 0.15 മിമി | 121-400: ± 0.2 മിമി |
റോട്ടർ മെറ്റൽ സ്ലീവ് ഉള്ള DS-25


മറ്റുതരത്തിൽ വ്യക്തമാക്കപ്പെടുന്നതുവരെ
| അളവുകൾ: mm | ഉപരിതല ഫിനിഷ്: N6 |
ലീനിയർ ടോളറൻസുകൾ
| 0.5-4.9: ± 0.05 മിമി | 5-30: ± 0.1 മിമി |
| 31-120: ± 0.15 മിമി | 121-400: ± 0.2 മിമി |
ഷാഫ്റ്റ് - ഇൻസ്റ്റാളേഷൻ അവസാനിപ്പിക്കുക (ഘട്ടം)

മറ്റുതരത്തിൽ വ്യക്തമാക്കപ്പെടുന്നതുവരെ
| അളവുകൾ: mm | ഉപരിതല ഫിനിഷ്: N6 |
ലീനിയർ ടോളറൻസുകൾ
| 0.5-4.9: ± 0.05 മിമി | 5-30: ± 0.1 മിമി |
| 31-120: ± 0.15 മിമി | 121-400: ± 0.2 മിമി |
ഭാഗം/വിവരണം/QTY ഇല്ല
| 1 | ഡിഎസ്-ക്സനുമ്ക്സ | ഉൾപ്പെടുത്തിയിട്ടുണ്ട് | DS-25 എൻകോഡർ | 1 | |
| 2 | EAPK004 | ഉൾപ്പെടുത്തിയിട്ടുണ്ട് | കിറ്റ് 0-80" | 3 x എൻകോഡർ clampന്റെ നൈലോൺ | 1 |
| 3 |
MA-DS25-004 |
ഓപ്ഷണൽ |
ഷാഫ്റ്റ് എൻഡ് ഇൻസ്റ്റലേഷൻ കിറ്റ് |
വാഷർ DIN125-A3.2 | 1 |
| 4 | സ്ക്രൂ DIN 7984 M3x5 | 1 |
നിർണ്ണായക അളവുകൾ അടയാളപ്പെടുത്തിയിരിക്കുന്നു
മുന്നറിയിപ്പ്
Loctite അല്ലെങ്കിൽ Cyanoacrylate അടങ്ങിയ മറ്റ് പശകൾ ഉപയോഗിക്കരുത്. 3M ഗ്ലൂ ഉപയോഗിക്കാൻ ഞങ്ങൾ ശുപാർശ ചെയ്യുന്നു - സ്കോച്ച്-വെൽഡ് TM എപ്പോക്സി പശ EC-2216 B / A.
ഡീപ്, ഷാഫ്റ്റ് - എൻഡ് ഇൻസ്റ്റലേഷൻ (ഘട്ടം)

മറ്റുതരത്തിൽ വ്യക്തമാക്കപ്പെടുന്നതുവരെ
- അളവുകൾ ഇതിൽ ഉണ്ട്: mm ഉപരിതല ഫിനിഷ്: N6
ലീനിയർ ടോളറൻസുകൾ
- 0.5-4.9: ± 0.05 മിമി 5-30: ± 0.1 മിമി
- 31-120: ± 0.15 മിമി 121-400: ± 0.2 മിമി
ഭാഗം/വിവരണം/QTY ഇല്ല
| 1 | ഡിഎസ്-ക്സനുമ്ക്സ | ഉൾപ്പെടുത്തിയിട്ടുണ്ട് | DS-25 എൻകോഡർ | 1 | |
| 2 | EAPK005 | ഓപ്ഷണൽ | കിറ്റ് | 3 x M2 എൻകോഡർ clamps | 1 |
| 3 |
MA-DS25-004 |
ഓപ്ഷണൽ |
ഷാഫ്റ്റ് എൻഡ് ഇൻസ്റ്റലേഷൻ കിറ്റ് |
വാഷർ DIN125-A3.2 | 1 |
| 4 | സ്ക്രൂ DIN 7984 M3x5 | 1 |
നിർണ്ണായക അളവുകൾ "*" എന്ന് അടയാളപ്പെടുത്തിയിരിക്കുന്നു
മുന്നറിയിപ്പ്
Loctite അല്ലെങ്കിൽ Cyanoacrylate അടങ്ങിയ മറ്റ് പശകൾ ഉപയോഗിക്കരുത്. 3M ഗ്ലൂ ഉപയോഗിക്കാൻ ഞങ്ങൾ ശുപാർശ ചെയ്യുന്നു - സ്കോച്ച്-വെൽഡ് TM എപ്പോക്സി പശ EC-2216 B / A.
പകർപ്പവകാശം © 2021 Netzer Precision Position Sensors ACS Ltd. എല്ലാ അവകാശങ്ങളും നിക്ഷിപ്തം.
പ്രമാണങ്ങൾ / വിഭവങ്ങൾ
 |
Netzer DS-25 17 ബിറ്റ് റെസല്യൂഷൻ സമ്പൂർണ്ണ എൻകോഡർ [pdf] ഉപയോക്തൃ മാനുവൽ DS-25 17 ബിറ്റ് റെസല്യൂഷൻ സമ്പൂർണ്ണ എൻകോഡർ, DS-25, 17 ബിറ്റ് റെസല്യൂഷൻ സമ്പൂർണ്ണ എൻകോഡർ, റെസല്യൂഷൻ സമ്പൂർണ്ണ എൻകോഡർ, സമ്പൂർണ്ണ എൻകോഡർ, എൻകോഡർ |



