TRINAMIC TMCM-1180 സ്റ്റെപ്പർ മോട്ടോർ കൺട്രോളർ ഉപയോക്തൃ ഗൈഡ്

ട്രൈനാമിക് മോഷൻ കൺട്രോൾ GmbH & Co. KG ഹാംബർഗ്, ജർമ്മനി www.trinamic.com
ഡൗൺലോഡ് ചെയ്തത് Arrow.com.
1 സവിശേഷതകൾ
PD86-1180 എന്നത് അത്യാധുനിക ഫീച്ചർ സെറ്റോടുകൂടിയ ഒരു സമ്പൂർണ്ണ മെക്കാട്രോണിക് പരിഹാരമാണ്. ഇത് വളരെ സംയോജിതമാണ് കൂടാതെ സൗകര്യപ്രദമായ കൈകാര്യം ചെയ്യൽ പ്രദാനം ചെയ്യുന്നു. PD86-1180-ൽ ഒരു NEMA 34 (ഫ്ലേഞ്ച് വലുപ്പം 86mm) സ്റ്റെപ്പർ മോട്ടോർ, കൺട്രോളർ/ഡ്രൈവർ ഇലക്ട്രോണിക്സ്, ഇന്റഗ്രേറ്റഡ് എൻകോഡർ എന്നിവ അടങ്ങിയിരിക്കുന്നു. TMCM-1180 എന്നത് സെൻസറില്ലാത്ത ലോഡ് ഡിപൻഡന്റ് കറന്റ് കൺട്രോളിനുള്ള പുതിയ മികച്ച കൂൾസ്റ്റെപ്പ് TM സാങ്കേതികവിദ്യ ഫീച്ചർ ചെയ്യുന്ന ഒരു ഇന്റലിജന്റ് സ്റ്റെപ്പർ മോട്ടോർ കൺട്രോളർ/ഡ്രൈവർ മൊഡ്യൂൾ ആണ്. ഇത് ഊർജ്ജ കാര്യക്ഷമമായ മോട്ടോർ പ്രവർത്തനം അനുവദിക്കുന്നു. നൂതന സ്റ്റാൾഗാർഡ്2TM ഫീച്ചർ ഉപയോഗിച്ച് ഉയർന്ന റെസല്യൂഷനിൽ മോട്ടോറിന്റെ ലോഡ് കണ്ടെത്താനാകും. 86mm ഫ്ലേഞ്ച് QMot സ്റ്റെപ്പർ മോട്ടോറിൽ നേരിട്ട് ഘടിപ്പിക്കുന്ന തരത്തിലാണ് മൊഡ്യൂൾ രൂപകൽപ്പന ചെയ്തിരിക്കുന്നത്.
പ്രധാന സ്വഭാവഗുണങ്ങൾ
ഇലക്ട്രിക്കൽ ഡാറ്റ
– സപ്ലൈ വോളിയംtagഇ: +24V DC അല്ലെങ്കിൽ +48V DC നാമമാത്ര
- മോട്ടോർ കറന്റ്: 5.5A RMS വരെ (പ്രോഗ്രാം ചെയ്യാവുന്നത്)
പാൻഡ്രൈവ് മോട്ടോർ
- 5.5A വരെ RMS നമ്പർ ഉള്ള രണ്ട് ഘട്ട ബൈപോളാർ സ്റ്റെപ്പർ മോട്ടോർ. കോയിൽ കറന്റ്
- ഹോൾഡിംഗ് ടോർക്ക്: 7Nm
എൻകോഡർ
- സംയോജിത സെൻസ് ഓസ്റ്റെപ്പ് മാഗ്നറ്റിക് എൻകോഡർ (ഒരു റൊട്ടേഷനിൽ പരമാവധി 256 ഇൻക്രിമെന്റുകൾ) ഉദാ. എല്ലാ പ്രവർത്തന സാഹചര്യങ്ങളിലും സ്ഥാനനിർണ്ണയത്തിലും ഘട്ടം-നഷ്ടം കണ്ടെത്തുന്നതിന്
ഇന്റഗ്രേറ്റഡ് മോഷൻ കൺട്രോളർ
- മോഷൻ പ്രോfile തത്സമയ കണക്കുകൂട്ടൽ (TMC428/429 മോഷൻ കൺട്രോളർ)
- മോട്ടോർ പാരാമീറ്ററുകളുടെ ഫ്ലൈ മാറ്റത്തിൽ (ഉദാ: സ്ഥാനം, വേഗത, ത്വരണം)
- മൊത്തത്തിലുള്ള സിസ്റ്റം നിയന്ത്രണത്തിനും സീരിയൽ കമ്മ്യൂണിക്കേഷൻ പ്രോട്ടോക്കോൾ കൈകാര്യം ചെയ്യുന്നതിനുമുള്ള ഉയർന്ന പ്രകടനമുള്ള മൈക്രോകൺട്രോളർ
ബൈപോളാർ സ്റ്റെപ്പർ മോട്ടോർ ഡ്രൈവർ
- ഒരു മുഴുവൻ ഘട്ടത്തിലും 256 മൈക്രോസ്റ്റെപ്പുകൾ വരെ
- ഉയർന്ന കാര്യക്ഷമമായ പ്രവർത്തനം, കുറഞ്ഞ പവർ ഡിസ്പേഷൻ
- ഡൈനാമിക് കറന്റ് നിയന്ത്രണം
- സംയോജിത സംരക്ഷണം
- സ്റ്റാൾ ഡിറ്റക്ഷനിനായുള്ള സ്റ്റാൾഗാർഡ്2 ഫീച്ചർ
- കുറഞ്ഞ വൈദ്യുതി ഉപഭോഗത്തിനും താപ വിസർജ്ജനത്തിനുമുള്ള കൂൾസ്റ്റെപ്പ് സവിശേഷത
ഇൻ്റർഫേസുകൾ
- സ്റ്റോപ്പ് സ്വിച്ചുകൾക്കും (ഇടത്തും വലത്തും) ഹോം സ്വിച്ചുകൾക്കുമുള്ള ഇൻപുട്ടുകൾ
- പൊതു ഉദ്ദേശ്യ ഇൻപുട്ടുകളും 2 പൊതു ഉദ്ദേശ്യ ഔട്ട്പുട്ടുകളും
– USB, RS232, RS485, CAN (2.0B മുതൽ 1Mbit/s വരെ) ആശയവിനിമയ ഇന്റർഫേസുകൾ
സുരക്ഷാ സവിശേഷതകൾ
- ഷട്ട്ഡൗൺ ഇൻപുട്ട്. ഈ പിൻ തുറന്നിരിക്കുന്നതോ ഗ്രൗണ്ടിലേക്ക് ഷോർട്ട് ചെയ്യുന്നതോ ആയിടത്തോളം ഡ്രൈവർ ഹാർഡ്വെയറിൽ പ്രവർത്തനരഹിതമാകും
– പ്രത്യേക വിതരണ വോള്യംtagഡ്രൈവറിനും ഡിജിറ്റൽ ലോജിക്കിനുമുള്ള ഇ ഇൻപുട്ടുകൾ - ഡ്രൈവർ വിതരണ വോള്യംtage ഡിജിറ്റൽ ലോജിക്കിനുള്ള വിതരണം ചെയ്യുമ്പോൾ ബാഹ്യമായി സ്വിച്ച് ഓഫ് ചെയ്തേക്കാം, അതിനാൽ ഡിജിറ്റൽ ലോജിക് സജീവമായി തുടരും
സോഫ്റ്റ്വെയർ
- TMCL™ അല്ലെങ്കിൽ Canopen-നൊപ്പം ലഭ്യമാണ്
- സ്വതന്ത്ര TMCL പ്രവർത്തനം അല്ലെങ്കിൽ വിദൂര നിയന്ത്രിത പ്രവർത്തനം
– 2048 TMCL കമാൻഡുകൾക്കുള്ള പ്രോഗ്രാം മെമ്മറി (അസ്ഥിരമല്ലാത്തത്).
– പിസി അധിഷ്ഠിത ആപ്ലിക്കേഷൻ ഡെവലപ്മെന്റ് സോഫ്റ്റ്വെയർ TMCL-IDE സൗജന്യമായി ലഭ്യമാണ്
– CANOpen: CiA 301 + CiA 402 (ഹോമിംഗ് മോഡ്, പ്രോfile പൊസിഷൻ മോഡും വെലോസിറ്റി മോഡും) പിന്തുണയ്ക്കുന്നു
കൂടുതൽ വിവരങ്ങൾക്ക് ദയവായി TMCL, CANOpen ഫേംവെയർ മാനുവലുകൾ എന്നിവ കാണുക
2 ഓർഡർ കോഡുകൾ
കേബിളുകൾ ഉൾപ്പെടുത്തിയിട്ടില്ല. ആവശ്യമെങ്കിൽ നിങ്ങളുടെ ഓർഡറിൽ ഉചിതമായ കേബിൾ ലൂം ചേർക്കുക.

3 മെക്കാനിക്കൽ, ഇലക്ട്രിക്കൽ ഇന്റർഫേസിംഗ്
3.1 TMCM-1180 അളവുകളും മൗണ്ടിംഗ് ഹോളുകളും
കൺട്രോളർ/ഡ്രൈവർ ബോർഡിന്റെ (TMCM-1180) അളവുകൾ ഏകദേശം. 86 എംഎം x 86 എംഎം 86 എംഎം സ്റ്റെപ്പർ മോട്ടോറിന്റെ പിൻ വശത്തേക്ക് യോജിപ്പിക്കാൻ. TMCM-1180-ന് 21.5mm ഉയരമുണ്ട്. M4 സ്ക്രൂകൾക്കായി നാല് മൌണ്ട് ദ്വാരങ്ങൾ ഉണ്ട്.

3.2 PD86-1180 അളവുകളും മോട്ടോർ സ്പെസിഫിക്കേഷനുകളും
PD86-1180-ൽ TMCM-1180 സ്റ്റെപ്പർ മോട്ടോർ കൺട്രോളർ/ഡ്രൈവർ ഇലക്ട്രോണിക് മൊഡ്യൂൾ, സെൻസ് ഓസ്റ്റെപ്പ് സാങ്കേതികവിദ്യയെ അടിസ്ഥാനമാക്കിയുള്ള ഒരു കാന്തിക എൻകോഡർ, 86 എംഎം ഫ്ലേഞ്ച് സൈസ് ബൈപോളാർ ഹൈബ്രിഡ് സ്റ്റെപ്പർ മോട്ടോർ എന്നിവ ഉൾപ്പെടുന്നു.
3.2.1 PD86-3-1180 ന്റെ അളവുകൾ

3.2.2 QSH8618-96-55-700-ന്റെ മോട്ടോർ സ്പെസിഫിക്കേഷനുകൾ

3.2.3 QSH8618-96-55-700 ന്റെ ടോർക്ക് ചിത്രം
ലളിതമായ താരതമ്യത്തെ അനുവദിക്കുന്നതിനായി ഫുൾ സ്റ്റെപ്പ് പ്രവർത്തനത്തിനായുള്ള മോട്ടോർ ടോർക്ക് സവിശേഷതകൾ ടോർക്ക് ചിത്രം വിശദീകരിക്കുന്നു. ഫുൾ സ്റ്റെപ്പ് ഓപ്പറേഷനായി ചിത്രീകരിക്കാത്ത നിരവധി അനുരണന പോയിന്റുകൾ (കുറവ് ടോർക്ക് ഉള്ളത്) എപ്പോഴും ഉണ്ട്. മൈക്രോസ്റ്റെപ്പ് ഓപ്പറേഷൻ വഴി ഇവ കുറയ്ക്കും.

3.3 TMCM-1180-ന്റെ കണക്ടറുകൾ
PD86-1180-ന്റെ കൺട്രോളർ/ഡ്രൈവർ ബോർഡ് മോട്ടോർ കണക്റ്റർ ഉൾപ്പെടെ എട്ട് കണക്ടറുകൾ വാഗ്ദാനം ചെയ്യുന്നു, ഇത് ഇലക്ട്രോണിക്സിലേക്ക് മോട്ടോർ കോയിലുകൾ ഘടിപ്പിക്കുന്നതിന് ആന്തരികമായി ഉപയോഗിക്കുന്നു. പവർ കണക്ടറിന് പുറമേ സീരിയൽ കമ്മ്യൂണിക്കേഷനായി രണ്ട് കണക്ടറുകളും (മിനി-യുഎസ്ബിക്ക് ഒന്ന്, RS232/RS485/CAN-ന് ഒന്ന്) കൂടാതെ അധിക ഇൻപുട്ട്, ഔട്ട്പുട്ട് സിഗ്നലുകൾക്കായി രണ്ട് കണക്ടറുകളും ഉണ്ട്. കൂടാതെ സ്റ്റെപ്പ്/ദിശയ്ക്ക് ഒരു കണക്ടറും എൻകോഡറിന് മറ്റൊന്നും ഉണ്ട്. ഔട്ട്പുട്ട് കണക്റ്റർ രണ്ട് പൊതു ഉദ്ദേശ്യ ഔട്ട്പുട്ടുകൾ വാഗ്ദാനം ചെയ്യുന്നു, ഒരു പവർ സപ്ലൈ വോളിയംtagഇ ഔട്ട്പുട്ടും ഒരു ഹാർഡ്വെയർ ഷട്ട്ഡൗൺ ഇൻപുട്ടും. ഷട്ട്ഡൗൺ ഇൻപുട്ട് തുറന്നിടുകയോ നിലത്തു കെട്ടുകയോ ചെയ്യുന്നത് മോട്ടോർ ഡ്രൈവറെ പ്രവർത്തനരഹിതമാക്കുംtagഹാർഡ്വെയറിൽ ഇ. പ്രവർത്തനത്തിനായി, ഈ ഇൻപുട്ട് വിതരണ വോള്യവുമായി ബന്ധിപ്പിച്ചിരിക്കണംtagഇ. ഇൻപുട്ട് കണക്റ്റർ സ്റ്റോപ്പ് സ്വിച്ചുകൾക്കായി രണ്ട് ഇൻപുട്ടുകൾ വാഗ്ദാനം ചെയ്യുന്നു (ഇടത്തും വലത്തും), ഒരു ഹോം സ്വിച്ച് ഇൻപുട്ടുകൾ, രണ്ട് പൊതു ഉദ്ദേശ്യ ഇൻപുട്ടുകൾ, സിസ്റ്റത്തിലോ സിഗ്നൽ ഗ്രൗണ്ടിലോ ഒരു കണക്ഷൻ.



3.3.1 പവർ കണക്റ്റർ
ഈ ഘടകം ഡിജിറ്റൽ ലോജിക് (പിൻ 2), ഡ്രൈവർ/പവർ എന്നിവയ്ക്കായി പ്രത്യേക പവർ സപ്ലൈ ഇൻപുട്ടുകൾ വാഗ്ദാനം ചെയ്യുന്നുtagഇ (പിൻ 1). രണ്ട് വിതരണ ഇൻപുട്ടുകളും പൊതുവായ ഗ്രൗണ്ട് കണക്ഷനുകൾ ഉപയോഗിക്കുന്നു (പിൻ 3 ഉം 4 ഉം). ഈ രീതിയിൽ, ഡ്രൈവർക്കുള്ള വൈദ്യുതി വിതരണംtagഡിജിറ്റൽ ലോജിക് സപ്ലൈ സജീവമായി നിലനിർത്തുമ്പോൾ, സ്ഥാനവും സ്റ്റാറ്റസ് വിവരങ്ങളും നിലനിർത്തുമ്പോൾ തന്നെ ഇ സ്വിച്ച് ഓഫ് ചെയ്തേക്കാം.
+ഉഡ്രൈവർ സപ്ലൈ മാത്രം പവർ സെക്ഷനിലേക്ക് മാത്രം പവർ സപ്ലൈ നൽകിയാൽ, ഒരു ആന്തരിക ഡയോഡ് ലോജിക് വിഭാഗത്തിലേക്കും പവർ വിതരണം ചെയ്യും. അതിനാൽ, പ്രത്യേക പവർ സപ്ലൈസ് ആവശ്യമില്ലെങ്കിൽ, മൊഡ്യൂൾ പവർ ചെയ്യുന്നതിന് പിൻ 1 ഉം 4 ഉം ഉപയോഗിക്കാൻ കഴിയും.

യൂണിറ്റിന്റെ വിശ്വസനീയമായ പ്രവർത്തനം ഉറപ്പാക്കാൻ, വൈദ്യുതി വിതരണത്തിന് മതിയായ ഔട്ട്പുട്ട് കപ്പാസിറ്റർ ഉണ്ടായിരിക്കണം, കൂടാതെ വിതരണ കേബിളുകൾക്ക് കുറഞ്ഞ പ്രതിരോധം ഉണ്ടായിരിക്കണം, അതിനാൽ ചോപ്പർ പ്രവർത്തനം യൂണിറ്റിൽ നേരിട്ട് വൈദ്യുതി വിതരണ തരംഗത്തിലേക്ക് നയിക്കില്ല. ചോപ്പറിന്റെ പ്രവർത്തനം മൂലമുള്ള പവർ സപ്ലൈ റിപ്പിൾ പരമാവധി കുറച്ച് 100mV ആയി നിലനിർത്തണം.
വൈദ്യുതി വിതരണത്തിനുള്ള സൂചനകൾ
- വൈദ്യുതി വിതരണ കേബിളുകൾ കഴിയുന്നത്ര ഹ്രസ്വമായി സൂക്ഷിക്കുക
- വൈദ്യുതി വിതരണ കേബിളുകൾക്കായി വലിയ വ്യാസങ്ങൾ ഉപയോഗിക്കുക

3.3.2 സീരിയൽ കമ്മ്യൂണിക്കേഷൻ കണക്റ്റർ
സീരിയൽ ആശയവിനിമയത്തിനായി 2 എംഎം പിച്ച് 8 പിൻ കണക്റ്റർ ഉപയോഗിക്കുന്നു. ഈ കണക്റ്റർ ഉപയോഗിച്ച് മൊഡ്യൂൾ RS232, RS485, CAN ആശയവിനിമയം എന്നിവയെ പിന്തുണയ്ക്കുന്നു.

3.3.3 USB കണക്റ്റർ
ബോർഡിൽ ഒരു 5-പിൻ മിനി-യുഎസ്ബി കണക്റ്റർ ലഭ്യമാണ് (അസംബ്ലി ഓപ്ഷനെ ആശ്രയിച്ചിരിക്കും).

3.3.4 ഔട്ട്പുട്ട് കണക്റ്റർ
ഒരു 2mm പിച്ച് 4 പിൻ കണക്ടർ രണ്ട് പൊതു ഉദ്ദേശ്യ ഔട്ട്പുട്ടുകളും ഡ്രൈവറും ബന്ധിപ്പിക്കുന്നതിന് ഉപയോഗിക്കുന്നുtagഇ ഹാർഡ്വെയർ ഷട്ട്ഡൗൺ ഇൻപുട്ട് പിൻ യൂണിറ്റിലേക്ക്.
മോട്ടോർ ഡ്രൈവർ പ്രവർത്തനക്ഷമമാക്കുന്നതിനായി എസ്tagഇ / ഷട്ട്ഡൗൺ (പിൻ 2) +Ulogic (പിൻ 1) ലേക്ക് ബന്ധിപ്പിക്കുക!


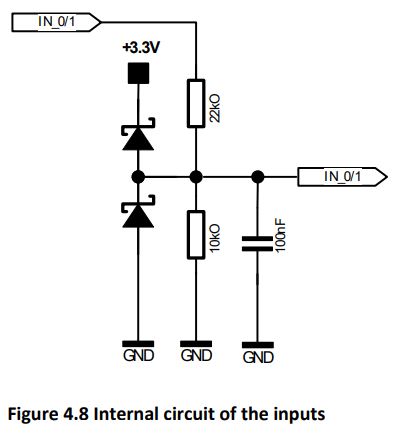
3.3.5 ഇൻപുട്ട് കണക്റ്റർ
പൊതു ആവശ്യത്തിനുള്ള ഇൻപുട്ടുകൾ, ഹോം, സ്റ്റോപ്പ് സ്വിച്ചുകൾ എന്നിവ യൂണിറ്റിലേക്ക് ബന്ധിപ്പിക്കുന്നതിന് 2 എംഎം പിച്ച് 6 പിൻ കണക്റ്റർ ഉപയോഗിക്കുന്നു.
ഇണചേരൽ കണക്റ്റർ ഭവനം: PHR-6 ഇണചേരൽ കണക്റ്റർ കോൺടാക്റ്റുകൾ: SPH-002T-P0.5S

3.2.5.1 ഇടത്തും വലത്തും പരിധി സ്വിച്ചുകൾ
TMCM-1180 ക്രമീകരിക്കാൻ കഴിയും, അങ്ങനെ ഒരു മോട്ടോറിന് ഇടത്തും വലത്തും പരിധി സ്വിച്ച് ഉണ്ട് (ചിത്രം 4.9).
സഞ്ചാരി പരിധി സ്വിച്ചുകളിലൊന്നിൽ എത്തുമ്പോൾ മോട്ടോർ നിർത്തുന്നു.

3.2.5.2 ട്രിപ്പിൾ സ്വിച്ച് കോൺഫിഗറേഷൻ
റഫറൻസ് സ്വിച്ച് സ്ഥാനത്തിന് ചുറ്റും ഒരു ടോളറൻസ് ശ്രേണി പ്രോഗ്രാം ചെയ്യാൻ സാധിക്കും. ചിത്രം 4.10-ൽ വിവരിച്ചിരിക്കുന്നതുപോലെ, ട്രിപ്പിൾ സ്വിച്ച് കോൺഫിഗറേഷന് ഇത് ഉപയോഗപ്രദമാണ്. ആ കോൺഫിഗറേഷനിൽ രണ്ട് സ്വിച്ചുകൾ ഓട്ടോമാറ്റിക് സ്റ്റോപ്പ് സ്വിച്ചുകളായി ഉപയോഗിക്കുന്നു, കൂടാതെ ഒരു അധിക സ്വിച്ച് ഇടത് സ്റ്റോപ്പ് സ്വിച്ചിനും വലത് സ്റ്റോപ്പ് സ്വിച്ചിനും ഇടയിലുള്ള റഫറൻസ് സ്വിച്ച് ആയി ഉപയോഗിക്കുന്നു. ഇടത് സ്റ്റോപ്പ് സ്വിച്ച്, റഫറൻസ് സ്വിച്ച് എന്നിവ ഒരുമിച്ച് വയർ ചെയ്തിരിക്കുന്നു. സെന്റർ സ്വിച്ച് (ട്രാവൽ സ്വിച്ച്) ഒരു സ്റ്റെപ്പ് നഷ്ടം കണ്ടെത്തുന്നതിന് അച്ചുതണ്ടിന്റെ ഒരു നിരീക്ഷണം അനുവദിക്കുന്നു.

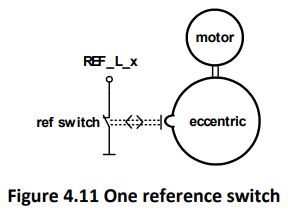
3.2.5.3 സർക്കുലർ സിസ്റ്റങ്ങൾക്കുള്ള ഒരു പരിധി സ്വിച്ച്
ഒരു വൃത്താകൃതിയിലുള്ള സംവിധാനം ഉപയോഗിക്കുകയാണെങ്കിൽ (ചിത്രം 4.11), ഒരു റഫറൻസ് സ്വിച്ച് മാത്രമേ ആവശ്യമുള്ളൂ, കാരണം അത്തരമൊരു സിസ്റ്റത്തിൽ അവസാന പോയിന്റുകളൊന്നുമില്ല.
3.3.6 ഘട്ടം/ദിശ കണക്റ്റർ
സ്റ്റെപ്പ്/ഡിർ ഇന്റർഫേസ് ബന്ധിപ്പിക്കുന്നതിന് 2 എംഎം പിച്ച് 4 പിൻ കണക്റ്റർ ഉപയോഗിക്കുന്നു.

3.3.7 എൻകോഡർ കണക്റ്റർ
എൻകോഡർ ബന്ധിപ്പിക്കുന്നതിന് 2 എംഎം പിച്ച് 5 പിൻ കണക്റ്റർ ഉപയോഗിക്കുന്നു.
ഇണചേരൽ കണക്റ്റർ ഭവനം: PHR-5 ഇണചേരൽ കണക്റ്റർ കോൺടാക്റ്റുകൾ: SPH-002T-P0.5S

3.3.8 മോട്ടോർ കണക്ടറും സ്പെസിഫിക്കേഷനുകളും
മോട്ടോർ കണക്ഷനായി 3.96 എംഎം പിച്ച് 4 പിൻ കണക്റ്റർ ഉപയോഗിക്കുന്നു. രണ്ട് മോട്ടോർ കോയിൽ വിൻഡിംഗുകളും (ബൈപോളാർ സ്റ്റെപ്പർ മോട്ടോർ) ഈ കണക്റ്ററുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു.
ഇണചേരൽ കണക്റ്റർ ഭവനം: VHR-4N ഇണചേരൽ കണക്റ്റർ കോൺടാക്റ്റുകൾ: BVH-21T-P1.1

4 ജമ്പർമാർ
ബോർഡിന്റെ മിക്ക ക്രമീകരണങ്ങളും സോഫ്റ്റ്വെയർ വഴിയാണ് ചെയ്യുന്നത്. എന്നിരുന്നാലും, കോൺഫിഗറേഷനായി കുറച്ച് ജമ്പറുകൾ ലഭ്യമാണ്.

4.1 RS485 ബസ് ടെർമിനേഷൻ
RS120 ഇന്റർഫേസിന്റെ ശരിയായ ബസ് ടെർമിനേഷനായി ബോർഡിൽ 485 ഓം റെസിസ്റ്റർ ഉൾപ്പെടുന്നു. ഈ ജമ്പർ അടയ്ക്കുമ്പോൾ, രണ്ട് ഡിഫറൻഷ്യൽ ബസ് ലൈനുകളായ RS485+, RS485- എന്നിവയ്ക്കിടയിൽ റെസിസ്റ്റർ സ്ഥാപിക്കും.
4.2 CAN ബസ് ടെർമിനേഷൻ
CAN ഇന്റർഫേസിന്റെ ശരിയായ ബസ് ടെർമിനേഷനായി ബോർഡിൽ 120 ഓം റെസിസ്റ്റർ ഉൾപ്പെടുന്നു. ഈ ജമ്പർ അടയ്ക്കുമ്പോൾ, CAN_H, CAN_L എന്നീ രണ്ട് ഡിഫറൻഷ്യൽ ബസ് ലൈനുകൾക്കിടയിൽ റെസിസ്റ്റർ സ്ഥാപിക്കും.
5 പ്രവർത്തന റേറ്റിംഗുകൾ
ചുവടെ കാണിച്ചിരിക്കുന്ന പ്രവർത്തന റേറ്റിംഗുകൾ ഡിസൈൻ മൂല്യങ്ങളായി ഉപയോഗിക്കണം. ഒരു സാഹചര്യത്തിലും പ്രവർത്തന സമയത്ത് പരമാവധി മൂല്യങ്ങൾ കവിയരുത്.

*) 5.5°C പാരിസ്ഥിതിക ഊഷ്മാവിൽ വായു സംവഹനം കൂടാതെ 30 മിനിറ്റ് നേരം മുഴുവൻ കറന്റിലും (50A RMS) പ്രവർത്തിക്കുന്ന ഒരു ക്ലൈമറ്റ് ചേമ്പറിനുള്ളിൽ കൺട്രോളർ ഡ്രൈവർ ഇലക്ട്രോണിക്സ് പരീക്ഷിച്ചു.
ശരിയായ തണുപ്പിക്കാതെ മുഴുവൻ കറന്റിലും പ്രവർത്തിക്കുമ്പോൾ മോട്ടോർ 50 ഡിഗ്രി സെൽഷ്യസിനു മുകളിൽ ചൂടായേക്കാം. ഇത് ഇലക്ട്രോണിക്സിന്റെ പാരിസ്ഥിതിക താപനില ഗണ്യമായി വർദ്ധിപ്പിച്ചേക്കാം. CoolStep ഓപ്പറേഷൻ മോഡ് ഉപയോഗിക്കുമ്പോൾ, യഥാർത്ഥ കറന്റ് പ്രോഗ്രാം ചെയ്ത മാക്സിനേക്കാൾ ഗണ്യമായി കുറവായിരിക്കാം. നിലവിലെ ഉൽപാദനവും താപനിലയും.
6 പ്രവർത്തന വിവരണം
ചിത്രം 7.1 ൽ PD86-1180 ന്റെ പ്രധാന ഭാഗങ്ങൾ കാണിച്ചിരിക്കുന്നു. പാൻഡ്രൈവിൽ പ്രധാനമായും µC (EEPROM TMCL മെമ്മറിയുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നു), TMC428/429 മോഷൻ കൺട്രോളർ, TMC262A-PC പവർ ഡ്രൈവർ, ഊർജ്ജ കാര്യക്ഷമമായ കൂൾസ്റ്റെപ്പ് സവിശേഷത, ബാഹ്യ MOSFET ഡ്രൈവറുകൾ എന്നിവ അടങ്ങിയിരിക്കുന്നു.tage, QSH8618 സ്റ്റെപ്പർ മോട്ടോറും സംയോജിത സെൻസ് ഓസ്റ്റെപ്പ് എൻകോഡറും. പകരമായി, ഒരു ബാഹ്യ എൻകോഡർ കണക്റ്റുചെയ്യുന്നത് സാധ്യമാണ്. നാമമാത്ര വിതരണ വോള്യംtages 24VDC അല്ലെങ്കിൽ 48VDC ആണ്.

6.1 സിസ്റ്റം ആർക്കിടെക്ചർ
TMCM-1180, TMCL (ട്രൈനാമിക് മോഷൻ കൺട്രോൾ ലാംഗ്വേജ്) ഓപ്പറേറ്റിംഗ് സിസ്റ്റവുമായി ഒരു മൈക്രോകൺട്രോളർ സംയോജിപ്പിക്കുന്നു. ചലന നിയന്ത്രണ തത്സമയ ജോലികൾ TMC428/429 ആണ്.
6.1.1 മൈക്രോകൺട്രോളർ
ഈ മൊഡ്യൂളിൽ, TMCL ഓപ്പറേറ്റിംഗ് സിസ്റ്റം പ്രവർത്തിപ്പിക്കുന്നതിനും TMC91/7 നിയന്ത്രിക്കുന്നതിനും Atmel AT256SAM428X429 ഉപയോഗിക്കുന്നു. സിപിയുവിന് 256 കെബി ഫ്ലാഷ് മെമ്മറിയും 64 കെബി റാമും ഉണ്ട്. മൈക്രോകൺട്രോളർ ടിഎംസിഎൽ (ട്രിനാമിക് മോഷൻ കൺട്രോൾ ലാംഗ്വേജ്) ഓപ്പറേറ്റിംഗ് സിസ്റ്റം പ്രവർത്തിപ്പിക്കുന്നു, ഇത് RS232, RS485, USB അല്ലെങ്കിൽ CAN ഇന്റർഫേസ് വഴി ഹോസ്റ്റിൽ നിന്ന് മൊഡ്യൂളിലേക്ക് അയയ്ക്കുന്ന TMCL കമാൻഡുകൾ നടപ്പിലാക്കുന്നത് സാധ്യമാക്കുന്നു. മൈക്രോകൺട്രോളർ TMCL കമാൻഡുകൾ വ്യാഖ്യാനിക്കുകയും ചലന കമാൻഡുകൾ നടപ്പിലാക്കുന്ന TMC428/429 നിയന്ത്രിക്കുകയും ചെയ്യുന്നു. കൂടാതെ ഇത് എൻകോഡർ ഇന്റർഫേസുമായി ബന്ധിപ്പിച്ച് ഇൻപുട്ടുകൾ പ്രോസസ്സ് ചെയ്യുന്നു. മൈക്രോകൺട്രോളറിന്റെ ഫ്ലാഷ് റോം ടിഎംസിഎൽ ഓപ്പറേറ്റിംഗ് സിസ്റ്റം ഉൾക്കൊള്ളുന്നു. TMCL ഓപ്പറേറ്റിംഗ് സിസ്റ്റം RS232 ഇന്റർഫേസ് വഴിയോ CAN ഇന്റർഫേസ് വഴിയോ അപ്ഡേറ്റ് ചെയ്യാവുന്നതാണ്. ഇത് ചെയ്യുന്നതിന് TMCL-IDE ഉപയോഗിക്കുക.
6.1.2 EEPROM
ഒറ്റപ്പെട്ട പ്രവർത്തനത്തിനായി TMCL പ്രോഗ്രാമുകൾ സംഭരിക്കുന്നതിന് TMCM-1180 മൊഡ്യൂളിൽ മൈക്രോകൺട്രോളറുമായി ഘടിപ്പിച്ചിരിക്കുന്ന 16kByte EEPROM സജ്ജീകരിച്ചിരിക്കുന്നു. EEPROM-ന് 2048 TMCL കമാൻഡുകൾ വരെ അടങ്ങുന്ന TMCL പ്രോഗ്രാമുകൾ സംഭരിക്കാൻ കഴിയും. കോൺഫിഗറേഷൻ ഡാറ്റ സംഭരിക്കുന്നതിനും EEPROM ഉപയോഗിക്കുന്നു.
6.1.3 മോഷൻ കൺട്രോളർ
TMC428/429 ഉയർന്ന പ്രകടനമുള്ള സ്റ്റെപ്പർ മോട്ടോർ കൺട്രോൾ IC ആണ്, കൂടാതെ മൂന്ന് 2-ഘട്ട-സ്റ്റെപ്പർ-മോട്ടോറുകൾ വരെ നിയന്ത്രിക്കാനാകും. സ്പീഡ് അല്ലെങ്കിൽ ആക്സിലറേഷൻ പോലുള്ള ചലന പാരാമീറ്ററുകൾ മൈക്രോകൺട്രോളർ വഴി SPI വഴി TMC428/429 ലേക്ക് അയയ്ക്കുന്നു. R ന്റെ കണക്കുകൂട്ടൽampഎസ്, സ്പീഡ് പ്രോfileടാർഗെറ്റ് മോഷൻ പാരാമീറ്ററുകൾ അടിസ്ഥാനമാക്കിയുള്ള ഹാർഡ്വെയർ ഉപയോഗിച്ചാണ് s ആന്തരികമായി ചെയ്യുന്നത്.
6.1.4 സ്റ്റെപ്പർ മോട്ടോർ ഡ്രൈവർ
TMC262A-PC ബൈപോളാർ സ്റ്റെപ്പർ മോട്ടോറുകൾക്കായുള്ള ഊർജ്ജ കാര്യക്ഷമതയുള്ള ഹൈ കറന്റ് ഹൈ പ്രിസിഷൻ മൈക്രോസ്റ്റെപ്പിംഗ് ഡ്രൈവർ ഐസിയാണ്. TMCM-1180 മൊഡ്യൂളിലെ ഈ ഡ്രൈവർ QSH262 മോട്ടോറുകളുള്ള PANdrives-നുള്ള TMC8618 പവർ ഡ്രൈവറിന്റെ ഒരു പ്രത്യേക പതിപ്പാണ്.
അതിന്റെ സവിശേഷമായ ഉയർന്ന റെസല്യൂഷൻ സെൻസർലെസ് ലോഡ് ഡിറ്റക്ഷൻ സ്റ്റാൾഗാർഡ്2, കൂൾസ്റ്റെപ്പ് എന്ന പ്രത്യേക സംയോജിത ലോഡ് ഡിപൻഡന്റ് കറന്റ് കൺട്രോൾ ഫീച്ചറിനായി ഉപയോഗിക്കുന്നു. ലോഡ് വായിച്ചെടുക്കാനും അമിതഭാരം കണ്ടെത്താനുമുള്ള കഴിവ്, ഉയർന്ന വിശ്വാസ്യത ആഗ്രഹിക്കുന്ന ഡ്രൈവുകൾക്ക് TMC262 ഒരു മികച്ച ചോയിസാക്കി മാറ്റുന്നു. TMC262-നെ സ്റ്റെപ്പ്/ഡയറക്ഷൻ സിഗ്നലുകൾ ഉപയോഗിച്ചും സീരിയൽ SPITM വഴിയും ഓടിക്കാൻ കഴിയും.

ലോഡ് കൂടുന്നതിനോ കുറയ്ക്കുന്നതിനോ ഉള്ള ഡ്രൈവറുടെ പ്രതികരണം നിയന്ത്രിക്കാൻ കൂൾസ്റ്റെപ്പ് കറന്റ് റെഗുലേറ്റർ അനുവദിക്കുന്നു. ഒപ്റ്റിമൽ മോട്ടോർ പ്രവർത്തനത്തിനായി ഏറ്റവും കുറഞ്ഞതും കൂടിയതുമായ ലോഡ് ആംഗിൾ നിർണ്ണയിക്കാൻ ആന്തരിക റെഗുലേറ്റർ രണ്ട് പരിധികൾ ഉപയോഗിക്കുന്നു. നിലവിലെ ഇൻക്രിമെന്റ് വേഗതയും നിലവിലെ ഡിക്രിമെന്റ് വേഗതയും ആപ്ലിക്കേഷനുമായി പൊരുത്തപ്പെടുത്താനാകും. കൂടാതെ, നിലവിലെ സ്കെയിൽ പാരാമീറ്റർ CS സജ്ജീകരിച്ച ഉയർന്ന നിലവിലെ പരിധിയുമായി ബന്ധപ്പെട്ട് താഴ്ന്ന നിലവിലെ പരിധി സജ്ജീകരിക്കാം.
6.1.5 സെൻസ് ഓസ്റ്റെപ്പ് എൻകോഡർ
ഈ യൂണിറ്റിൽ ഉപയോഗിച്ചിരിക്കുന്ന sensOstep എൻകോഡർ കുറഞ്ഞ റെസല്യൂഷനുള്ള ഒരു കാന്തിക കോണിക സ്ഥാന എൻകോഡർ സിസ്റ്റത്തെ അടിസ്ഥാനമാക്കിയുള്ളതാണ്. ഒരു സ്റ്റെപ്പർ മോട്ടോർ അച്ചുതണ്ടിന്റെ പിൻഭാഗത്ത് സ്ഥിതി ചെയ്യുന്ന ഒരു ചെറിയ കാന്തം, മോട്ടോറിന്റെ പിൻ വശത്ത് കാന്തത്തിന് മുകളിൽ സ്ഥാപിച്ചിരിക്കുന്ന ഇന്റഗ്രേറ്റഡ് ഡിജിറ്റൽ സിഗ്നൽ പ്രോസസ്സിംഗ് (ഉദാ. ഓട്ടോമാറ്റിക് ഗെയിൻ കൺട്രോൾ, ടെമ്പറേച്ചർ കോമ്പൻസേഷൻ മുതലായവ) ഉള്ള ഒരു ഹാൾ സെൻസർ ഐസി എന്നിവ ഇതിൽ അടങ്ങിയിരിക്കുന്നു. അച്ചടിച്ച സർക്യൂട്ട് ബോർഡ് മൌണ്ട് ചെയ്തു. എൻകോഡർ ഓരോ വിപ്ലവത്തിനും 8 ബിറ്റ് (256 സ്റ്റെപ്പുകൾ) റെസലൂഷനുകൾ വാഗ്ദാനം ചെയ്യുന്നു, ഇത് സ്റ്റാൻഡേർഡ് 1.8° സ്റ്റെപ്പർ മോട്ടോറുകൾ ഉപയോഗിച്ച് സ്റ്റെപ്പ് നഷ്ടം കണ്ടെത്തുന്നതിന് പര്യാപ്തമാണ്.
7 TMCM-1180 പ്രവർത്തന വിവരണം
7.1 കണക്കുകൂട്ടൽ: വേഗതയും ആക്സിലറേഷനും വേഴ്സസ്. മൈക്രോസ്റ്റെപ്പ്, ഫുൾസ്റ്റെപ്പ് ഫ്രീക്വൻസി
TMC428/429-ലേക്ക് അയച്ച പാരാമീറ്ററുകളുടെ മൂല്യങ്ങൾക്ക് വേഗതയായി സെക്കൻഡിൽ കറങ്ങുന്നത് പോലെയുള്ള സാധാരണ മോട്ടോർ മൂല്യങ്ങൾ ഇല്ല. എന്നാൽ ഈ വിഭാഗത്തിൽ കാണിച്ചിരിക്കുന്നതുപോലെ ഈ മൂല്യങ്ങൾ TMC428/429-പാരാമീറ്ററുകളിൽ നിന്ന് കണക്കാക്കാം.


8 ടി.എം.സി.എൽ
TMCL, TRINAMIC Motion Control Language, പ്രത്യേക ഉൽപ്പന്നങ്ങളെ പരാമർശിക്കുന്ന പ്രത്യേക ഡോക്യുമെന്റേഷനുകളിൽ വിവരിച്ചിരിക്കുന്നു (ഉദാ. TMCM-1180 TMCL ഫേംവെയർ മാനുവൽ). മാനുവലുകൾ www.trinamic.com ൽ നൽകിയിരിക്കുന്നു. അപ്ഡേറ്റ് ചെയ്ത ഡാറ്റ ഷീറ്റുകൾക്കും ആപ്ലിക്കേഷൻ കുറിപ്പുകൾക്കുമായി ദയവായി ഈ ഉറവിടങ്ങൾ പരിശോധിക്കുക.
9 കാനോപെൻ
ഭാവി പതിപ്പുകളിൽ CANOpen പ്രോട്ടോക്കോളിനൊപ്പം TMCM-1180 മൊഡ്യൂളും ഉപയോഗിക്കേണ്ടതാണ്. ഈ ആവശ്യത്തിനായി, ഒരു പ്രത്യേക CANOpen ഫേംവെയർ വികസിപ്പിച്ചുകൊണ്ടിരിക്കുന്നു. ഈ ഓപ്ഷനിൽ നിങ്ങൾക്ക് താൽപ്പര്യമുണ്ടെങ്കിൽ ദയവായി TRINAMIC-നെ ബന്ധപ്പെടുക.
10 ലൈഫ് സപ്പോർട്ട് പോളിസി
TRINAMIC Motion Control GmbH & Co. KG, TRINAMIC Motion Control GmbH & Co. KG യുടെ പ്രത്യേക രേഖാമൂലമുള്ള സമ്മതമില്ലാതെ, ലൈഫ് സപ്പോർട്ട് സിസ്റ്റങ്ങളിൽ ഉപയോഗിക്കുന്നതിന് അതിന്റെ ഏതെങ്കിലും ഉൽപ്പന്നങ്ങളെ അംഗീകരിക്കുകയോ വാറന്റ് നൽകുകയോ ചെയ്യുന്നില്ല.
ലൈഫ് സപ്പോർട്ട് സിസ്റ്റങ്ങൾ എന്നത് ജീവനെ പിന്തുണയ്ക്കുന്നതിനോ നിലനിർത്തുന്നതിനോ ഉദ്ദേശിച്ചുള്ള ഉപകരണങ്ങളാണ്, കൂടാതെ നൽകിയിരിക്കുന്ന നിർദ്ദേശങ്ങൾക്കനുസൃതമായി ശരിയായി ഉപയോഗിക്കുമ്പോൾ അവയുടെ പരാജയം വ്യക്തിപരമായ പരിക്കിലോ മരണത്തിലോ കലാശിക്കുമെന്ന് ന്യായമായും പ്രതീക്ഷിക്കാം.
© TRINAMIC Motion Control GmbH & Co. KG 2013 ഈ ഡാറ്റ ഷീറ്റിൽ നൽകിയിരിക്കുന്ന വിവരങ്ങൾ കൃത്യവും വിശ്വസനീയവുമാണെന്ന് വിശ്വസിക്കപ്പെടുന്നു. എന്നിരുന്നാലും, അതിന്റെ ഉപയോഗത്തിന്റെ അനന്തരഫലങ്ങൾക്കോ പേറ്റന്റുകളുടെയോ മൂന്നാം കക്ഷികളുടെ മറ്റ് അവകാശങ്ങളുടെയോ ഏതെങ്കിലും ലംഘനത്തിനോ ഉത്തരവാദിത്തം ഏറ്റെടുക്കുന്നില്ല, അത് അതിന്റെ ഉപയോഗത്തിൽ നിന്ന് ഉണ്ടാകാം. അറിയിപ്പ് കൂടാതെ സ്പെസിഫിക്കേഷനുകൾ മാറ്റത്തിന് വിധേയമാണ്. ഉപയോഗിക്കുന്ന എല്ലാ വ്യാപാരമുദ്രകളും അവയുടെ ഉടമസ്ഥരുടെ സ്വത്താണ്.

11 റിവിഷൻ ചരിത്രം
11.1 ഹാർഡ്വെയർ റിവിഷൻ

11.2 ഹാർഡ്വെയർ റിവിഷൻ

12 റഫറൻസുകൾ
[TMCM-1180 / PD86-1180 TMCL] TMCM-1180, PD86-1180 TMCL ഫേംവെയർ മാനുവൽ[TMCL-IDE] TMCL-IDE ഉപയോക്തൃ മാനുവൽ
[QSH8618] QSH8618 മാനുവൽ
ദയവായി റഫർ ചെയ്യുക www.trinamic.com.
പ്രമാണങ്ങൾ / വിഭവങ്ങൾ
 |
ട്രൈനാമിക് ടിഎംസിഎം-1180 സ്റ്റെപ്പർ മോട്ടോർ കൺട്രോളർ [pdf] ഉപയോക്തൃ ഗൈഡ് TMCM-1180 സ്റ്റെപ്പർ മോട്ടോർ കൺട്രോളർ, TMCM-1180, സ്റ്റെപ്പർ മോട്ടോർ കൺട്രോളർ, മോട്ടോർ കൺട്രോളർ, കൺട്രോളർ |