ബങ്കർ പ്രോ
എജൈൽ എക്സ് റോബോട്ടിക്സ് ടീം
ഉപയോക്തൃ മാനുവൽ V.1.0.0 2021.10

ബങ്കർ പ്രോ ട്രാക്ക് ചെയ്ത മൊബൈൽ റോബോട്ട്
ഈ അധ്യായത്തിൽ പ്രധാനപ്പെട്ട സുരക്ഷാ വിവരങ്ങൾ അടങ്ങിയിരിക്കുന്നു, റോബോട്ട് ആദ്യമായി ഓൺ ചെയ്യപ്പെടുന്നതിന് മുമ്പ്, ഉപകരണം ഉപയോഗിക്കുന്നതിന് മുമ്പ് ഏതെങ്കിലും വ്യക്തിയോ സ്ഥാപനമോ ഈ വിവരങ്ങൾ വായിക്കുകയും മനസ്സിലാക്കുകയും വേണം. ഉപയോഗത്തെക്കുറിച്ച് നിങ്ങൾക്ക് എന്തെങ്കിലും ചോദ്യങ്ങളുണ്ടെങ്കിൽ, ദയവായി ഞങ്ങളെ ബന്ധപ്പെടുക support@agilex.ai. ഈ മാനുവലിന്റെ അധ്യായങ്ങളിലെ എല്ലാ അസംബ്ലി നിർദ്ദേശങ്ങളും മാർഗ്ഗനിർദ്ദേശങ്ങളും ദയവായി പിന്തുടരുകയും നടപ്പിലാക്കുകയും ചെയ്യുക, അത് വളരെ പ്രധാനമാണ്. മുന്നറിയിപ്പ് അടയാളങ്ങളുമായി ബന്ധപ്പെട്ട വാചകത്തിന് പ്രത്യേക ശ്രദ്ധ നൽകണം.
![]() പ്രധാനപ്പെട്ട സുരക്ഷാ വിവരങ്ങൾ
പ്രധാനപ്പെട്ട സുരക്ഷാ വിവരങ്ങൾ
ഈ മാനുവലിലെ വിവരങ്ങളിൽ ഒരു സമ്പൂർണ്ണ റോബോട്ട് ആപ്ലിക്കേഷന്റെ രൂപകൽപ്പനയും ഇൻസ്റ്റാളേഷനും പ്രവർത്തനവും ഉൾപ്പെടുന്നില്ല, കൂടാതെ ഈ സമ്പൂർണ്ണ സിസ്റ്റത്തിന്റെ സുരക്ഷയെ ബാധിച്ചേക്കാവുന്ന എല്ലാ പെരിഫറലുകളും ഇതിൽ ഉൾപ്പെടുന്നില്ല. പൂർണ്ണമായ സിസ്റ്റത്തിന്റെ രൂപകൽപ്പനയും ഉപയോഗവും റോബോട്ട് ഇൻസ്റ്റാൾ ചെയ്തിട്ടുള്ള രാജ്യത്തിന്റെ മാനദണ്ഡങ്ങളിലും ചട്ടങ്ങളിലും സ്ഥാപിച്ചിട്ടുള്ള സുരക്ഷാ ആവശ്യകതകൾക്ക് അനുസൃതമായി പ്രവർത്തിക്കേണ്ടതുണ്ട്. ബങ്കർപ്രോയുടെ ഇന്റഗ്രേറ്റർമാർക്കും അന്തിമ ഉപഭോക്താക്കൾക്കും പ്രസക്തമായ വ്യവസ്ഥകളും പ്രായോഗിക നിയമങ്ങളും ചട്ടങ്ങളും പാലിക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കാനും റോബോട്ടിന്റെ പൂർണ്ണമായ പ്രയോഗത്തിൽ വലിയ അപകടങ്ങളൊന്നുമില്ലെന്ന് ഉറപ്പാക്കാനും ഉത്തരവാദിത്തമുണ്ട്. ഇതിൽ ഇനിപ്പറയുന്നവ ഉൾപ്പെടുന്നു എന്നാൽ അതിൽ മാത്രം പരിമിതപ്പെടുന്നില്ല:
1. കാര്യക്ഷമതയും ഉത്തരവാദിത്തവും
- പൂർണ്ണമായ റോബോട്ട് സിസ്റ്റത്തിന്റെ അപകടസാധ്യത വിലയിരുത്തുക.
- അപകടസാധ്യത വിലയിരുത്തൽ നിർവചിച്ചിരിക്കുന്ന മറ്റ് യന്ത്രങ്ങളുടെ അധിക സുരക്ഷാ ഉപകരണങ്ങൾ ഒരുമിച്ച് ബന്ധിപ്പിക്കുക.
- സോഫ്റ്റ്വെയർ, ഹാർഡ്വെയർ സിസ്റ്റങ്ങൾ ഉൾപ്പെടെ മുഴുവൻ റോബോട്ട് സിസ്റ്റത്തിന്റെ പെരിഫറലുകളുടെയും രൂപകൽപ്പനയും ഇൻസ്റ്റാളേഷനും ശരിയാണെന്ന് സ്ഥിരീകരിക്കുക.
- ഈ റോബോട്ടിന് ഒരു സമ്പൂർണ്ണ സ്വയംഭരണ മൊബൈൽ റോബോട്ടിന്റെ പ്രസക്തമായ സുരക്ഷാ ഫംഗ്ഷനുകൾ ഇല്ല, ഓട്ടോമാറ്റിക് ആൻറി-കളിഷൻ, ആന്റി-ഫാലിംഗ്, ക്രിയേറ്റർ അപ്രോച്ച് മുന്നറിയിപ്പ് മുതലായവ ഉൾപ്പെടുന്നു. വികസിപ്പിച്ച റോബോട്ട് പ്രായോഗിക പ്രയോഗത്തിൽ വലിയ അപകടങ്ങളിൽ നിന്നും മറഞ്ഞിരിക്കുന്ന അപകടങ്ങളിൽ നിന്നും മുക്തമാണെന്ന് ഉറപ്പാക്കാൻ പ്രസക്തമായ വ്യവസ്ഥകളും ബാധകമായ നിയമങ്ങളും ചട്ടങ്ങളും.
- സാങ്കേതികതയിൽ എല്ലാ രേഖകളും ശേഖരിക്കുക file: അപകടസാധ്യത വിലയിരുത്തലും ഈ മാനുവലും ഉൾപ്പെടെ.
- ഉപകരണങ്ങൾ പ്രവർത്തിപ്പിക്കുന്നതിനും ഉപയോഗിക്കുന്നതിനും മുമ്പ് സാധ്യമായ സുരക്ഷാ അപകടങ്ങളെക്കുറിച്ച് അറിയുക.
2. പരിസ്ഥിതി
- ആദ്യ ഉപയോഗത്തിന്, അടിസ്ഥാന പ്രവർത്തന ഉള്ളടക്കവും പ്രവർത്തന സവിശേഷതകളും മനസിലാക്കാൻ ദയവായി ഈ മാനുവൽ ശ്രദ്ധാപൂർവ്വം വായിക്കുക.
- റിമോട്ട് കൺട്രോളിനായി താരതമ്യേന തുറന്ന പ്രദേശം തിരഞ്ഞെടുക്കുക, കാരണം വാഹനത്തിൽ തന്നെ ഓട്ടോമാറ്റിക് തടസ്സങ്ങൾ ഒഴിവാക്കാനുള്ള സെൻസറുകൾ ഇല്ല.
- -20-60 ആംബിയന്റ് താപനിലയിൽ ഉപയോഗിക്കുക.
- വാഹനം ഐപി പ്രൊട്ടക്ഷൻ ലെവൽ വ്യക്തിഗതമായി ഇഷ്ടാനുസൃതമാക്കിയില്ലെങ്കിൽ, അതിന്റെ വാട്ടർ പ്രൂഫ്, ഡസ്റ്റ് പ്രൂഫ് കപ്പാസിറ്റി IP66 ആണ്.
3. പരിശോധിക്കുക
- ഓരോ ഉപകരണത്തിനും മതിയായ ചാർജ് ഉണ്ടെന്ന് ഉറപ്പാക്കുക.
- വാഹനത്തിന് പ്രകടമായ അസ്വാഭാവികതകൾ ഇല്ലെന്ന് ഉറപ്പാക്കുക.
- റിമോട്ട് കൺട്രോളിന്റെ ബാറ്ററിക്ക് മതിയായ ചാർജ് ഉണ്ടോയെന്ന് പരിശോധിക്കുക.
- ഉപയോഗിക്കുമ്പോൾ എമർജൻസി സ്റ്റോപ്പ് സ്വിച്ച് റിലീസ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
4. ഓപ്പറേഷൻ
- പ്രവർത്തന സമയത്ത് ചുറ്റുമുള്ള പ്രദേശം താരതമ്യേന തുറന്നിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
- കാഴ്ചയുടെ പരിധിക്കുള്ളിൽ വിദൂര നിയന്ത്രണം.
- BUNKERPRO യുടെ പരമാവധി ലോഡ് 120KG ആണ്. ഉപയോഗിക്കുമ്പോൾ, പേലോഡ് 120KG കവിയുന്നില്ലെന്ന് ഉറപ്പാക്കുക.
- BUNKERPRO-യ്ക്കായി ഒരു ബാഹ്യ വിപുലീകരണം ഇൻസ്റ്റാൾ ചെയ്യുമ്പോൾ, വിപുലീകരണത്തിന്റെ പിണ്ഡത്തിന്റെ കേന്ദ്രം സ്ഥിരീകരിക്കുകയും അത് ഭ്രമണത്തിന്റെ കേന്ദ്രത്തിലാണെന്ന് ഉറപ്പാക്കുകയും ചെയ്യുക.
- ഉപകരണങ്ങളുടെ വോളിയം എപ്പോൾtage 48V യിൽ കുറവാണ്, കൃത്യസമയത്ത് ചാർജ് ചെയ്യുക.
- ഉപകരണങ്ങൾ അസാധാരണമാകുമ്പോൾ, ദ്വിതീയ കേടുപാടുകൾ ഒഴിവാക്കാൻ ദയവായി അത് ഉപയോഗിക്കുന്നത് ഉടൻ നിർത്തുക.
- ഉപകരണങ്ങൾ അസാധാരണമാകുമ്പോൾ, ദയവായി ബന്ധപ്പെട്ട സാങ്കേതിക ഉദ്യോഗസ്ഥരെ ബന്ധപ്പെടുക, അനുമതിയില്ലാതെ അത് കൈകാര്യം ചെയ്യരുത്.
- ഉപകരണങ്ങളുടെ ഐപി പരിരക്ഷണ നില അനുസരിച്ച് സംരക്ഷണ നിലയുടെ ആവശ്യകതകൾ നിറവേറ്റുന്ന ഒരു പരിതസ്ഥിതിയിൽ ദയവായി ഇത് ഉപയോഗിക്കുക.
- വാഹനം നേരിട്ട് തള്ളരുത്.
- ചാർജ് ചെയ്യുമ്പോൾ, അന്തരീക്ഷ ഊഷ്മാവ് 0°C-ൽ കൂടുതലാണെന്ന് ഉറപ്പാക്കുക.
5. പരിപാലനം
- സസ്പെൻഡ് ചെയ്ത ട്രാക്കിന്റെ പിരിമുറുക്കം പതിവായി പരിശോധിക്കുക, ഓരോ 150~200H ഇടയിലും ട്രാക്ക് ശക്തമാക്കുക.
- ഓരോ 500 മണിക്കൂർ പ്രവർത്തനത്തിനും ശേഷം, ശരീരത്തിന്റെ ഓരോ ഭാഗത്തിന്റെയും ബോൾട്ടുകളും നട്ടുകളും പരിശോധിക്കുക. അവ അയഞ്ഞാൽ ഉടൻ തന്നെ ഞാൻ അവയെ മുറുക്കുന്നു.
- ബാറ്ററിയുടെ സംഭരണശേഷി ഉറപ്പാക്കാൻ, ബാറ്ററി ചാർജ്ജ് ഉപയോഗിച്ച് സൂക്ഷിക്കണം, കൂടാതെ ദീർഘനേരം ഉപയോഗിച്ചില്ലെങ്കിൽ ബാറ്ററി പതിവായി ചാർജ് ചെയ്യണം.
BUNKERPRO-യുടെ ആമുഖം
BUNKERPRO എന്നത് എല്ലാ മേഖലകളിലും ഉള്ള വ്യവസായ ആപ്ലിക്കേഷനുകൾക്കായുള്ള ട്രാക്ക് ചെയ്ത ചേസിസ് വാഹനമാണ്. ലളിതവും സെൻസിറ്റീവുമായ പ്രവർത്തനം, വലിയ വികസന ഇടം, വിവിധ മേഖലകളിലെ വികസനത്തിനും പ്രയോഗത്തിനും അനുയോജ്യം, സ്വതന്ത്ര സസ്പെൻഷൻ സംവിധാനം, ഹെവി-ഡ്യൂട്ടി ഷോക്ക് ആഗിരണം, ശക്തമായ ക്ലൈംബിംഗ് കഴിവ്, പടികൾ കയറാനുള്ള കഴിവ് എന്നിവ ഇതിന് ഉണ്ട്. പരിശോധനയ്ക്കും പര്യവേക്ഷണത്തിനുമുള്ള റോബോട്ടുകൾ, റെസ്ക്യൂ, ഇഒഡി, പ്രത്യേക ഷൂട്ടിംഗ്, പ്രത്യേക ഗതാഗതം മുതലായവ പോലുള്ള പ്രത്യേക റോബോട്ടുകളുടെ വികസനത്തിന് റോബോട്ട് ചലന പരിഹാരങ്ങൾ പരിഹരിക്കുന്നതിന് ഇത് ഉപയോഗിക്കാം.
ഉൽപ്പന്ന ലിസ്റ്റ്
| പേര് | അളവ് |
| ബങ്കർ പ്രോ റോബോട്ട് ബോഡി | X1 |
| ബാറ്ററി ചാർജർ (AC220V) | X1 |
| ഏവിയേഷൻ ആൺ പ്ലഗ് (4-പിൻ) | X1 |
| FS റിമോട്ട് കൺട്രോൾ ട്രാൻസ്മിറ്റർ (ഓപ്ഷണൽ) | X1 |
| USB മുതൽ CAN വരെയുള്ള ആശയവിനിമയ ഘടകം | X1 |
സാങ്കേതിക സവിശേഷതകൾ
| പാരാമീറ്റർ തരങ്ങൾ | ഇനങ്ങൾ | മൂല്യങ്ങൾ |
| അളവുകൾ | അളവുകൾ | 1064mm*845mm*73mm |
| ചേസിസ് ഉയരം | 120 മി.മീ | |
| ട്രാക്ക് വീതി | 150 മി.മീ | |
| നീളം | 740 മി.മീ | |
| ഭാരം | ഭാരം | ഏകദേശം 180 കിലോ |
| ലോഡ് ചെയ്യുക | 120 കിലോ | |
| ബാറ്ററി | ടൈപ്പ് ചെയ്യുക | ലിഥിയം ബാറ്ററി |
| ശേഷി | 60AH | |
| വാല്യംtage | 48V | |
| ചലനം | പരമാവധി കയറാനുള്ള ശേഷി | 30° |
| പരമാവധി വേഗത | 1.5മി/സെ | |
| ഏറ്റവും കുറഞ്ഞ ടേണിംഗ് ആരം | സ്ഥലത്ത് കറങ്ങാം | |
| പരമാവധി തടസ്സം | 180 മി.മീ | |
| മോട്ടോർ പാരാമീറ്ററുകൾ | 2×1500W ബ്രഷ്ലെസ് സെർവോ മോട്ടോർ | |
| കോഡ് ഡിസ്ക് പാരാമീറ്ററുകൾ | 2500 വരികൾ | |
| പ്രവർത്തന താപനില | -20~60° | |
| കുറയ്ക്കൽ അനുപാതം | 1: 7.5 | |
| നിയന്ത്രണം | നിയന്ത്രണ മോഡ് | വിദൂര നിയന്ത്രണം |
| ആർസി ട്രാൻസ്മിറ്റർ | 2.4G/തീവ്രമായ ദൂരം 200M | |
| ആശയവിനിമയ ഇൻ്റർഫേസ് | CAN |
വികസനത്തിനുള്ള ആവശ്യകത
BUNKERPRO ഫാക്ടറിയിൽ FS റിമോട്ട് കൺട്രോൾ കൊണ്ട് സജ്ജീകരിച്ചിരിക്കുന്നു, കൂടാതെ ചലനവും റൊട്ടേഷൻ പ്രവർത്തനങ്ങളും പൂർത്തിയാക്കാൻ ഉപയോക്താക്കൾക്ക് റിമോട്ട് കൺട്രോളിലൂടെ BUNKERPRO മൊബൈൽ റോബോട്ട് ചേസിസ് നിയന്ത്രിക്കാനാകും; BUNKERPRO CAN ഇന്റർഫേസ് കൊണ്ട് സജ്ജീകരിച്ചിരിക്കുന്നു, ഉപയോക്താക്കൾക്ക് അതിലൂടെ ദ്വിതീയ വികസനം നടത്താൻ കഴിയും.
അടിസ്ഥാനകാര്യങ്ങൾ
ഈ വിഭാഗം BUNKERPRO മൊബൈൽ റോബോട്ട് ചേസിസിന് ഒരു അടിസ്ഥാന ആമുഖം നൽകും, അതുവഴി ഉപയോക്താക്കൾക്കും ഡെവലപ്പർമാർക്കും BUNKERPRO ചേസിസിനെക്കുറിച്ച് അടിസ്ഥാന ധാരണ ലഭിക്കും.
1 ഇലക്ട്രിക്കൽ ഇന്റർഫേസുകളെക്കുറിച്ചുള്ള നിർദ്ദേശങ്ങൾ
പിൻവശത്തെ ഇലക്ട്രിക്കൽ ഇന്റർഫേസുകൾ ചിത്രം 2.1-ൽ കാണിച്ചിരിക്കുന്നു, ഇവിടെ Q1 എന്നത് CAN, 48V പവർ ഏവിയേഷൻ ഇന്റർഫേസ് ആണ്, Q2 എന്നത് പവർ സ്വിച്ച് ആണ്, Q3 ആണ് ചാർജിംഗ് ഇന്റർഫേസ്, Q4 ആണ് ആന്റിന, Q5, Q6 എന്നിവ യഥാക്രമം ഡ്രൈവർ ഡീബഗ്ഗിംഗ് ഇന്റർഫേസും പ്രധാനവുമാണ്. കൺട്രോൾ ഡീബഗ്ഗിംഗ് ഇന്റർഫേസ് (പുറത്തേക്ക് തുറന്നിട്ടില്ല), കൂടാതെ Q7 എന്നത് പവർ ഡിസ്പ്ലേ ഇന്ററാക്ഷൻ ആണ്.

Q1 ന്റെ ആശയവിനിമയത്തിന്റെയും പവർ ഇന്റർഫേസിന്റെയും നിർവചനം ചിത്രം 2-2 ൽ കാണിച്ചിരിക്കുന്നു.

| പിൻ നമ്പർ. | പിൻ തരം | പ്രവർത്തനവും നിർവ്വചനം | അഭിപ്രായങ്ങൾ |
| 1 | ശക്തി | വി.സി.സി | പവർ പോസിറ്റീവ്, വാല്യംtagഇ ശ്രേണി 23 - 29.2V, പരമാവധി. നിലവിലെ 10A |
| 2 | ശക്തി | ജിഎൻഡി | പവർ നെഗറ്റീവ് |
| 3 | CAN | CAN_H | CAN ബസ് ഉയരം |
| 4 | CAN | CAN_L | CAN ബസ് കുറവാണ് |
ചിത്രം 2.2 പിൻ ഏവിയേഷൻ എക്സ്റ്റൻഷൻ ഇന്റർഫേസിന്റെ പിൻ നിർവ്വചനം
വിദൂര നിയന്ത്രണത്തിനുള്ള നിർദ്ദേശങ്ങൾ
FS റിമോട്ട് കൺട്രോൾ BUNKERPRO-യുടെ ഒരു ഓപ്ഷണൽ ആക്സസറിയാണ്. യഥാർത്ഥ ആവശ്യങ്ങൾക്കനുസരിച്ച് ഉപഭോക്താക്കൾക്ക് തിരഞ്ഞെടുക്കാം. റിമോട്ട് കൺട്രോളിന് BUNKERPRO യൂണിവേഴ്സൽ റോബോട്ട് ചേസിസ് എളുപ്പത്തിൽ നിയന്ത്രിക്കാനാകും. ഈ ഉൽപ്പന്നത്തിൽ, ഞങ്ങൾ ഇടതുവശത്തുള്ള ത്രോട്ടിൽ ഡിസൈൻ ഉപയോഗിക്കുന്നു. അതിന്റെ നിർവചനത്തിനും പ്രവർത്തനത്തിനും ചിത്രം 2.3 കാണുക. ബട്ടണുകളുടെ പ്രവർത്തനങ്ങൾ ഇങ്ങനെ നിർവചിച്ചിരിക്കുന്നു: SWA, SWC, SWD എന്നിവ താൽക്കാലികമായി പ്രവർത്തനരഹിതമാക്കിയിരിക്കുന്നു; SWB എന്നത് കൺട്രോൾ മോഡ് സെലക്ഷൻ ബട്ടണാണ്, മുകളിലേക്ക് ഡയൽ ചെയ്യുന്നത് കമാൻഡ് കൺട്രോൾ മോഡാണ്, മധ്യഭാഗത്തേക്ക് ഡയൽ ചെയ്യുന്നത് റിമോട്ട് കൺട്രോൾ മോഡാണ്; S1 എന്നത് ബങ്കർപ്രോയെ മുന്നോട്ടും പിന്നോട്ടും നിയന്ത്രിക്കുന്ന ത്രോട്ടിൽ ബട്ടണാണ്; S2 ഭ്രമണം നിയന്ത്രിക്കുന്നു, അതേസമയം POWER പവർ ബട്ടണാണ്, ഒരേ സമയം അവ അമർത്തി നിങ്ങൾക്ക് റിമോട്ട് കൺട്രോൾ ഓണാക്കാനാകും. റിമോട്ട് കൺട്രോൾ ഓൺ ചെയ്യുമ്പോൾ SWA, SWB, SWC, SWD എന്നിവ മുകളിലായിരിക്കണം എന്നത് ശ്രദ്ധിക്കേണ്ടതാണ്.

ചിത്രം 2.3 FS റിമോട്ട് കൺട്രോൾ ബട്ടണുകളുടെ സ്കീമാറ്റിക് ഡയഗ്രം
നിയന്ത്രണ ആവശ്യങ്ങളും ചലനങ്ങളും സംബന്ധിച്ച നിർദ്ദേശങ്ങൾ
ചിത്രം 8855-ൽ കാണിച്ചിരിക്കുന്നതുപോലെ ISO 2.4 സ്റ്റാൻഡേർഡ് അനുസരിച്ച് ഞങ്ങൾ ഗ്രൗണ്ട് മൊബൈൽ വാഹനത്തിനായി ഒരു കോർഡിനേറ്റ് റഫറൻസ് സിസ്റ്റം സജ്ജമാക്കി.

ചിത്രം 2.4-ൽ കാണിച്ചിരിക്കുന്നതുപോലെ, BUNKERPRO-യുടെ വാഹന ബോഡി സ്ഥാപിതമായ റഫറൻസ് കോർഡിനേറ്റ് സിസ്റ്റത്തിന്റെ X അക്ഷത്തിന് സമാന്തരമാണ്.
റിമോട്ട് കൺട്രോൾ മോഡിൽ, X അച്ചുതണ്ടിന്റെ പോസിറ്റീവ് ദിശയിലേക്ക് നീങ്ങാൻ റിമോട്ട് കൺട്രോൾ ജോയിസ്റ്റിക്ക് S1 മുന്നോട്ട് നീക്കുക, കൂടാതെ X അക്ഷത്തിന്റെ നെഗറ്റീവ് ദിശയിലേക്ക് നീങ്ങാൻ S1 നെ പിന്നിലേക്ക് തള്ളുക. S1 പരമാവധി മൂല്യത്തിലേക്ക് തള്ളുമ്പോൾ, X അക്ഷത്തിന്റെ പോസിറ്റീവ് ദിശയിലുള്ള ചലന വേഗത പരമാവധി ആണ്, അത് ഏറ്റവും കുറഞ്ഞ മൂല്യത്തിലേക്ക് തള്ളുമ്പോൾ, X അക്ഷത്തിന്റെ നെഗറ്റീവ് ദിശയിലുള്ള ചലന വേഗത പരമാവധി ആണ്; റിമോട്ട് കൺട്രോൾ ജോയിസ്റ്റിക്ക് S2 വാഹന ബോഡിയുടെ ഇടത്തോട്ടും വലത്തോട്ടും ഭ്രമണം നിയന്ത്രിക്കുന്നു. S2 ഇടത്തേക്ക് തള്ളുമ്പോൾ, വാഹന ബോഡി X അക്ഷത്തിന്റെ പോസിറ്റീവ് ദിശയിൽ നിന്ന് Y അക്ഷത്തിന്റെ പോസിറ്റീവ് ദിശയിലേക്ക് കറങ്ങുന്നു, കൂടാതെ S2 വലത്തേക്ക് തള്ളുമ്പോൾ, വാഹന ബോഡി പോസിറ്റീവ് ദിശയിൽ നിന്ന് കറങ്ങുന്നു.
X അക്ഷത്തിന്റെ ദിശ Y അക്ഷത്തിന്റെ നെഗറ്റീവ് ദിശയിലേക്ക്. പരമാവധി മൂല്യത്തിലേക്ക് S2 ഇടത്തേക്ക് തള്ളുമ്പോൾ, എതിർ ഘടികാരദിശയിലുള്ള ഭ്രമണത്തിന്റെ രേഖീയ പ്രവേഗം പരമാവധി ആണ്, കൂടാതെ S2 പരമാവധി വലത്തേക്ക് തള്ളുമ്പോൾ, ഘടികാരദിശയിലുള്ള ഭ്രമണത്തിന്റെ രേഖീയ പ്രവേഗം പരമാവധി ആയിരിക്കും. കൺട്രോൾ കമാൻഡ് മോഡിൽ, ലീനിയർ പ്രവേഗത്തിന്റെ പോസിറ്റീവ് മൂല്യം അർത്ഥമാക്കുന്നത് X അച്ചുതണ്ടിന്റെ പോസിറ്റീവ് ദിശയിലേക്ക് നീങ്ങുന്നു, കൂടാതെ ലീനിയർ പ്രവേഗത്തിന്റെ നെഗറ്റീവ് മൂല്യം അർത്ഥമാക്കുന്നത് X അക്ഷത്തിന്റെ നെഗറ്റീവ് ദിശയിലേക്ക് നീങ്ങുന്നു എന്നാണ്; കോണീയ പ്രവേഗത്തിന്റെ പോസിറ്റീവ് മൂല്യം എന്നതിനർത്ഥം വാഹന ബോഡി X അക്ഷത്തിന്റെ പോസിറ്റീവ് ദിശയിൽ നിന്ന് Y അക്ഷത്തിന്റെ പോസിറ്റീവ് ദിശയിലേക്ക് നീങ്ങുന്നു എന്നാണ്, കൂടാതെ കോണീയ പ്രവേഗത്തിന്റെ നെഗറ്റീവ് മൂല്യം അർത്ഥമാക്കുന്നത് വാഹന ബോഡി പോസിറ്റീവ് ദിശയിൽ നിന്ന് നീങ്ങുന്നു എന്നാണ്. Y അക്ഷത്തിന്റെ നെഗറ്റീവ് ദിശയിലേക്കുള്ള X അക്ഷം.
ഉപയോഗവും വികസനവും
ഈ വിഭാഗം പ്രധാനമായും ബങ്കർപ്രോ പ്ലാറ്റ്ഫോമിന്റെ അടിസ്ഥാന പ്രവർത്തനവും ഉപയോഗവും പരിചയപ്പെടുത്തുന്നു, കൂടാതെ ബാഹ്യ CAN ഇന്റർഫേസും CAN ബസ് പ്രോട്ടോക്കോളും വഴി വാഹന ബോഡിയുടെ ദ്വിതീയ വികസനം എങ്ങനെ നടത്താം.
ഉപയോഗവും പ്രവർത്തനവും
പരിശോധിക്കുക
- വാഹനത്തിന്റെ ബോഡിയുടെ അവസ്ഥ പരിശോധിക്കുക. വാഹന ബോഡിക്ക് വ്യക്തമായ അസാധാരണത്വങ്ങളുണ്ടോയെന്ന് പരിശോധിക്കുക; അങ്ങനെയെങ്കിൽ, വിൽപ്പനാനന്തര പിന്തുണയുമായി ബന്ധപ്പെടുക;
- ആദ്യമായി ഉപയോഗിക്കുമ്പോൾ, പിൻ ഇലക്ട്രിക്കൽ പാനലിലെ Q2 (പവർ സ്വിച്ച്) അമർത്തിയോ എന്ന് സ്ഥിരീകരിക്കുക; അത് അമർത്തിയില്ലെങ്കിൽ, ദയവായി അത് അമർത്തി വിടുക, അത് റിലീസ് ചെയ്ത അവസ്ഥയിലാണ്.
സ്റ്റാർട്ടപ്പ്
- പവർ സ്വിച്ച് അമർത്തുക (ഇലക്ട്രിക്കൽ പാനലിൽ Q2); സാധാരണ സാഹചര്യങ്ങളിൽ, പവർ സ്വിച്ചിന്റെ പ്രകാശം പ്രകാശിക്കും, വോൾട്ട്മീറ്റർ ബാറ്ററി വോളിയം പ്രദർശിപ്പിക്കുംtagഇ സാധാരണയായി;
- ബാറ്ററി വോള്യം പരിശോധിക്കുകtagഇ. വോള്യം എങ്കിൽtage 48V യിൽ കൂടുതലാണ്, ബാറ്ററി വോളിയം എന്നാണ് ഇതിനർത്ഥംtagഇ സാധാരണമാണ്. വോള്യം എങ്കിൽtage 48V യിൽ കുറവാണ്, ദയവായി ചാർജ് ചെയ്യുക; എപ്പോൾ വോള്യംtage 46V-നേക്കാൾ കുറവാണ്, BUNKERPRO-യ്ക്ക് സാധാരണഗതിയിൽ നീങ്ങാൻ കഴിയില്ല.
ഷട്ട് ഡൗൺ
- വൈദ്യുതി വിച്ഛേദിക്കുന്നതിന് പവർ സ്വിച്ച് അമർത്തുക;
വിദൂര നിയന്ത്രണത്തിന്റെ അടിസ്ഥാന പ്രവർത്തന നടപടിക്രമങ്ങൾ:
- BUNKERPRO റോബോട്ട് ചേസിസ് സാധാരണയായി ആരംഭിച്ച ശേഷം, റിമോട്ട് കൺട്രോൾ ആരംഭിച്ച് റിമോട്ട് കൺട്രോൾ വഴി BUNKER PRO പ്ലാറ്റ്ഫോമിന്റെ ചലനം നിയന്ത്രിക്കുന്നതിന് റിമോട്ട് കൺട്രോൾ മോഡ് തിരഞ്ഞെടുക്കുക.
ചാർജിംഗ്
ബങ്കർപ്രോയിൽ സ്ഥിരസ്ഥിതിയായി ഒരു സാധാരണ ചാർജർ സജ്ജീകരിച്ചിരിക്കുന്നു, അത് ഉപഭോക്താക്കളുടെ ചാർജിംഗ് ആവശ്യങ്ങൾ നിറവേറ്റുന്നു. ചാർജിംഗിന്റെ നിർദ്ദിഷ്ട പ്രവർത്തന നടപടിക്രമങ്ങൾ ഇപ്രകാരമാണ്:
- BUNKERPRO ചേസിസ് ഒരു ഷട്ട്ഡൗൺ നിലയിലാണെന്ന് ഉറപ്പാക്കുക. ചാർജ് ചെയ്യുന്നതിനുമുമ്പ്, പിൻവശത്തെ ഇലക്ട്രിക്കൽ കൺസോളിലെ Q2 (പവർ സ്വിച്ച്) ഓഫാക്കിയിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക; ചാർജറിന്റെ പ്ലഗ് ഇതിലേക്ക് തിരുകുക
- പിൻ ഇലക്ട്രിക്കൽ കൺട്രോൾ പാനലിൽ Q3 ചാർജിംഗ് ഇന്റർഫേസ്;
- ചാർജർ വൈദ്യുതി വിതരണവുമായി ബന്ധിപ്പിച്ച് ചാർജിംഗ് അവസ്ഥയിലേക്ക് പ്രവേശിക്കാൻ ചാർജർ സ്വിച്ച് ഓണാക്കുക.
- സ്ഥിരസ്ഥിതിയായി ചാർജ് ചെയ്യുമ്പോൾ, ചേസിസിൽ ഇൻഡിക്കേറ്റർ ലൈറ്റ് ഇല്ല. ഇത് ചാർജ് ചെയ്യുന്നുണ്ടോ ഇല്ലയോ എന്നത് ചാർജറിന്റെ സ്റ്റാറ്റസ് ഇൻഡിക്കേറ്ററിനെ ആശ്രയിച്ചിരിക്കുന്നു.
വികസനം
ഉപയോക്താവിന്റെ വികസനത്തിനായി BUNKERPRO ഒരു CAN ഇന്റർഫേസ് നൽകുന്നു, കൂടാതെ ഈ ഇന്റർഫേസിലൂടെ ഉപയോക്താവിന് വാഹന ബോഡി നിയന്ത്രിക്കാനാകും.
BUNKERPRO-യിലെ CAN ആശയവിനിമയ നിലവാരം CAN2.0B നിലവാരം സ്വീകരിക്കുന്നു; കമ്മ്യൂണിക്കേഷൻ ബോഡ് നിരക്ക് 500K ആണ്, സന്ദേശ ഫോർമാറ്റ് MOTOROLA ഫോർമാറ്റ് സ്വീകരിക്കുന്നു. ചലനത്തിന്റെ രേഖീയ വേഗതയും ചേസിസിന്റെ ഭ്രമണത്തിന്റെ കോണീയ വേഗതയും ബാഹ്യ CAN ബസ് ഇന്റർഫേസിലൂടെ നിയന്ത്രിക്കാനാകും; BUNKERPRO നിലവിലെ ചലന നില വിവരങ്ങളും BUNKERPRO ചേസിസിന്റെ സ്റ്റാറ്റസ് വിവരങ്ങളും തത്സമയം ഫീഡ്ബാക്ക് ചെയ്യും.
പ്രോട്ടോക്കോളിൽ സിസ്റ്റം സ്റ്റാറ്റസ് ഫീഡ്ബാക്ക് ഫ്രെയിം, മൂവ്മെന്റ് കൺട്രോൾ ഫീഡ്ബാക്ക് ഫ്രെയിം, കൺട്രോൾ ഫ്രെയിം എന്നിവ ഉൾപ്പെടുന്നു.
പ്രോട്ടോക്കോളിന്റെ ഉള്ളടക്കം ഇപ്രകാരമാണ്:
സിസ്റ്റം സ്റ്റാറ്റസ് ഫീഡ്ബാക്ക് കമാൻഡിൽ നിലവിലെ വാഹന ബോഡി സ്റ്റാറ്റസ് ഫീഡ്ബാക്ക്, കൺട്രോൾ മോഡ് സ്റ്റാറ്റസ് ഫീഡ്ബാക്ക്, ബാറ്ററി വോള്യം എന്നിവ ഉൾപ്പെടുന്നുtagഇ ഫീഡ്ബാക്ക്, തെറ്റായ ഫീഡ്ബാക്ക്. പ്രോട്ടോക്കോളിന്റെ ഉള്ളടക്കം പട്ടിക 3.1 ൽ കാണിച്ചിരിക്കുന്നു.
പട്ടിക 3.1 ബങ്കർപ്രോ ചേസിസ് സിസ്റ്റം സ്റ്റാറ്റസിന്റെ ഫീഡ്ബാക്ക് ഫ്രെയിം
| കമാൻഡ് നാമം | സിസ്റ്റം സ്റ്റാറ്റസ് ഫീഡ്ബാക്ക് കമാൻഡ് | |||
| അയയ്ക്കുന്ന നോഡ് | നോഡ് സ്വീകരിക്കുന്നു | ID | സൈക്കിൾ ഞാൻ) | സമയപരിധി സ്വീകരിക്കുക (മിസെ) |
| സ്റ്റെയർ-ബൈ-വയർ ചേസിസ് | തീരുമാനമെടുക്കൽ നിയന്ത്രണ യൂണിറ്റ് | 0x221 | 200മി.എസ് | ഒന്നുമില്ല |
| ഡാറ്റ ദൈർഘ്യം | 0x08 | |||
| സ്ഥാനം | ഫംഗ്ഷൻ | ഡാറ്റ തരം | വിവരണം | |
| ബൈറ്റ് [0] | യുടെ നിലവിലെ അവസ്ഥ വാഹന ശരീരം | ഒപ്പിടാത്ത int8 | 0x00 സിസ്റ്റം സാധാരണ അവസ്ഥയിലാണ് Ox01 എമർജൻസി സ്റ്റോപ്പ് മോഡ് 0x02 സിസ്റ്റം ഒഴിവാക്കൽ | |
| ബൈറ്റ് f 1] | മോഡ് നിയന്ത്രണം | ഒപ്പിടാത്ത int8 | Ox00 സ്റ്റാൻഡ്ബൈ മോഡ് Ox01 CAN കമാൻഡ് കൺട്രോൾ മോഡ് 0x03 റിമോട്ട് കൺട്രോൾ മോഡ് | |
| ബൈറ്റ് [2] ബൈറ്റ് [3] | ബാറ്ററി വോള്യംtagഇ ആണ് 8 ബിറ്റുകൾ കൂടുതലാണ് v ബാഫ്റ്റീരിയോൾtagഇ ആണ് എട്ട് ബിറ്റുകൾ കുറവാണ് | ഒപ്പിടാത്തത് int16 | യഥാർത്ഥ വാല്യംtagex 10 (0.1V ന്റെ കൃത്യതയോടെ) | |
| ആകുക [4] ബൈറ്റ് [5] | സംവരണം പരാജയം വിവരങ്ങൾ | ഒപ്പിടാത്ത int8 | 0x0 [തെറ്റായ വിവരങ്ങളുടെ വിവരണം) കാണുക | |
| ബൈറ്റ് [6] | സംവരണം | – | ഒക്സക്സനുമ്ക്സ | |
| ബൈറ്റ് [7] | എണ്ണം ചെക്ക് (എണ്ണം) | ഒപ്പിടാത്ത int8 | 0-255 സൈക്കിൾ എണ്ണം: ഓരോ തവണയും ഒരു നിർദ്ദേശം അയയ്ക്കുമ്പോൾ, എണ്ണം ഒരിക്കൽ കൂടും |
പട്ടിക 3.2 തെറ്റായ വിവരങ്ങളുടെ വിവരണം
| തെറ്റായ വിവരങ്ങളുടെ വിവരണം | ||
| ബൈറ്റ് | ബിറ്റ് | അർത്ഥം |
| ബിറ്റ് [0] | ബാറ്ററി അണ്ടർവോൾtagഇ തെറ്റ് | |
| ബിറ്റ് [1] | ബാറ്ററി അണ്ടർവോൾtagഇ മുന്നറിയിപ്പ് | |
| ബിറ്റ് [2] | റിമോട്ട് കൺട്രോൾ ഡിസ്കണക്ഷൻ പരിരക്ഷ (0: സാധാരണ, 1: റിമോട്ട് കൺട്രോൾ വിച്ഛേദിക്കൽ) | |
| ബിറ്റ് [3] | നമ്പർ.1 മോട്ടോർ കമ്മ്യൂണിക്കേഷൻ പരാജയം (0: നമ്പർ പരാജയം 1: പരാജയം) | |
| ബിറ്റ് [4] | നമ്പർ.2 മോട്ടോർ കമ്മ്യൂണിക്കേഷൻ പരാജയം (0: നമ്പർ പരാജയം 1: പരാജയം) | |
| ബിറ്റ് [5] | റിസർവ് ചെയ്തത്, ഡിഫോൾട്ട് 0 | |
| ബിറ്റ് [6] | റിസർവ് ചെയ്തത്, ഡിഫോൾട്ട് 0 | |
| ബിറ്റ് [7] | റിസർവ് ചെയ്തത്, ഡിഫോൾട്ട് 0 |
ചലന നിയന്ത്രണ ഫീഡ്ബാക്ക് ഫ്രെയിമിന്റെ കമാൻഡിൽ നിലവിലെ ലീനിയർ പ്രവേഗത്തിന്റെയും ചലിക്കുന്ന വാഹന ബോഡിയുടെ കോണീയ പ്രവേഗത്തിന്റെയും ഫീഡ്ബാക്ക് ഉൾപ്പെടുന്നു. നിർദ്ദിഷ്ട പ്രോട്ടോക്കോൾ ഉള്ളടക്കം പട്ടിക 3.3 ൽ കാണിച്ചിരിക്കുന്നു.
പട്ടിക 3.3 ചലന നിയന്ത്രണ ഫീഡ്ബാക്ക് ഫ്രെയിം
| കമാൻഡ് നാമം | ചലന നിയന്ത്രണ ഫീഡ്ബാക്ക് കമാൻഡ് | |||
| അയയ്ക്കുന്നു നോഡ് | നോഡ് സ്വീകരിക്കുന്നു | ID | സൈക്കിൾ (ms) | കാലഹരണപ്പെടൽ (മിസെ) സ്വീകരിക്കുക |
| സ്റ്റെയർ-ബൈവയർ ചേസിസ് | തീരുമാനമെടുക്കൽ നിയന്ത്രണ യൂണിറ്റ് | 0x221 | 20മി.എസ് | ഒന്നുമില്ല |
| ഡാറ്റ നീളം | 0x08 | |||
| സ്ഥാനം | ഫംഗ്ഷൻ | ഡാറ്റ തരം | വിവരണം | |
| ബൈറ്റ് [0] ബൈറ്റ് [1] | പ്രസ്ഥാനം വേഗത 8 ബിറ്റുകൾ കൂടുതലാണ് ഓവ്മെന്റ് വേഗത 8 ബിറ്റുകൾ കുറവാണ് | int16 ഒപ്പിട്ടു | യഥാർത്ഥ വേഗത × 1000 (ഒരു കൃത്യതയോടെ 0.001മി/സെ) | |
| ബൈറ്റ് [2] ബൈറ്റ് [3] | ഭ്രമണ വേഗത 8 ബിറ്റുകൾ കൂടുതലാണ് ഭ്രമണ വേഗത 8 ബിറ്റുകൾ കുറവാണ് | int16 ഒപ്പിട്ടു | യഥാർത്ഥ വേഗത × 1000 (ഒരു കൃത്യതയോടെ 0.001റേഡി/സെക്കൻഡ്) | |
| ബൈറ്റ് [4] | സംവരണം | – | 0x00 | |
| ബൈറ്റ് [5] | സംവരണം | – | 0x00 | |
| ബൈറ്റ് [6] | സംവരണം | – | 0x00 | |
| ബൈറ്റ് [7] | സംവരണം | – | 0x00 |
കൺട്രോൾ ഫ്രെയിമിൽ ലീനിയർ വെലോസിറ്റി കൺട്രോൾ ഓപ്പണിംഗ്, ആംഗുലാർ വെലോസിറ്റി കൺട്രോൾ ഓപ്പണിംഗ്, ചെക്ക് സം എന്നിവ ഉൾപ്പെടുന്നു. പ്രോട്ടോക്കോളിന്റെ നിർദ്ദിഷ്ട ഉള്ളടക്കം പട്ടിക 3.4 ൽ കാണിച്ചിരിക്കുന്നു.
പട്ടിക 3.4 ചലന നിയന്ത്രണ ഫ്രെയിം
| കമാൻഡ് നാമം | നിയന്ത്രണ മോഡ് | |||
| അയയ്ക്കുന്ന നോഡ് | നോഡ് സ്വീകരിക്കുന്നു | ID | സൈക്കിൾ (ആർഎൻഎസ്) | സമയപരിധി (മിസെ) സ്വീകരിക്കുക |
| തീരുമാനമെടുക്കൽ നിയന്ത്രണ യൂണിറ്റ് | ചേസിസ് നോഡ് | ഒക്സക്സനുമ്ക്സ | 20മി.എസ് | ഒന്നുമില്ല |
| ഡാറ്റ ദൈർഘ്യം | 0x08 | |||
| സ്ഥാനം | ഫംഗ്ഷൻ | ഡാറ്റ തരം | ||
| ബൈറ്റ് [0] ബൈറ്റ് [1) | ലീനിയർ വെലോസിറ്റി എട്ട് ബിറ്റുകൾ കൂടുതലാണ് ലീനിയർ പ്രവേഗം എട്ട് ബിറ്റുകൾ കുറവാണ് | int16 ഒപ്പിട്ടു | വാഹന ബോഡിയുടെ ചലിക്കുന്ന വേഗത. യൂണിറ്റ്: mrins, ശ്രേണി [-1700,1700] | |
| ബൈറ്റ് [2] ബൈറ്റ് [3] | കോണീയ പ്രവേഗം എട്ട് ബിറ്റുകളാണ് ഉയർന്ന കോണീയ വേഗത എട്ട് ബിറ്റുകളാണ് താഴ്ന്നത് | int16 ഒപ്പിട്ടു | വാഹന ബോഡി റൊട്ടേഷന്റെ കോണീയ പ്രവേഗം, യൂണിറ്റ്: 0.001 റാഡുകൾ. പരിധി [- 3140,3140) | |
| ബൈറ്റ് [4] | സംവരണം | — | ഒക്സക്സനുമ്ക്സ | |
| ബൈറ്റ് [5] | സംവരണം | — | ഒക്സക്സനുമ്ക്സ | |
| ബൈറ്റ് [6] | സംവരണം | — | ഒക്സക്സനുമ്ക്സ | |
| ബൈറ്റ് [7] | സംവരണം | — | ഒക്സക്സനുമ്ക്സ |
ടെർമിനലിന്റെ കൺട്രോൾ ഇന്റർഫേസ് സജ്ജമാക്കാൻ മോഡ് സെറ്റിംഗ് ഫ്രെയിം ഉപയോഗിക്കുന്നു. നിർദ്ദിഷ്ട പ്രോട്ടോക്കോൾ ഉള്ളടക്കം പട്ടിക 3.5 ൽ കാണിച്ചിരിക്കുന്നു
പട്ടിക 3.5 നിയന്ത്രണ മോഡ് ക്രമീകരണ ഫ്രെയിം
| കമാൻഡ് നാമം | നിയന്ത്രണ മോഡ് ക്രമീകരണം കമാൻഡ് | |||
| അയയ്ക്കുന്ന നോഡ് | നോഡ് സ്വീകരിക്കുന്നു | ID | സൈക്കിൾ (മിസെ) | സമയപരിധി (മിസെ) സ്വീകരിക്കുക |
| തീരുമാനമെടുക്കൽ നിയന്ത്രണ യൂണിറ്റ് | ചേസിസ് നോഡ് | 0x421 | 20മി.എസ് | 500മി.എസ് |
| ഡാറ്റ ദൈർഘ്യം | ഒക്സക്സനുമ്ക്സ | |||
| സ്ഥാനം | ഫംഗ്ഷൻ | ഡാറ്റ തരം | വിവരണം | |
| ബൈറ്റ് (01 | നിയന്ത്രിക്കാൻ കഴിയും പ്രാപ്തമാക്കുക | ഒപ്പിടാത്ത int8 | Ox00 സ്റ്റാൻഡ്ബൈ മോഡ് 0x01 CAN കമാൻഡ് മോഡ് പ്രവർത്തനക്ഷമമാക്കുക |
ശ്രദ്ധിക്കുക [1] നിയന്ത്രണ മോഡിന്റെ വിവരണം
BUNKERPRO-യുടെ റിമോട്ട് കൺട്രോൾ പവർ ചെയ്യാത്തപ്പോൾ, കൺട്രോൾ മോഡ് ഡിഫോൾട്ടായി സ്റ്റാൻഡ്ബൈ മോഡാണ്, കൂടാതെ മൂവ്മെന്റ് കൺട്രോൾ കമാൻഡ് അയയ്ക്കുന്നതിന് നിങ്ങൾ അത് കമാൻഡ് മോഡിലേക്ക് മാറ്റേണ്ടതുണ്ട്. റിമോട്ട് കൺട്രോൾ ഓണാണെങ്കിൽ, റിമോട്ട് കൺട്രോളിന് ഏറ്റവും ഉയർന്ന അധികാരമുണ്ട്, കമാൻഡുകളുടെ നിയന്ത്രണം സംരക്ഷിക്കാൻ കഴിയും. റിമോട്ട് കൺട്രോൾ കമാൻഡ് മോഡിലേക്ക് മാറുമ്പോൾ, സ്പീഡ് കമാൻഡിനോട് പ്രതികരിക്കുന്നതിന് മുമ്പ് അതിന് നിയന്ത്രണ മോഡ് ക്രമീകരണ കമാൻഡ് അയയ്ക്കേണ്ടതുണ്ട്.
സിസ്റ്റം പിശകുകൾ മായ്ക്കുന്നതിന് സ്റ്റാറ്റസ് സെറ്റിംഗ് ഫ്രെയിം ഉപയോഗിക്കുന്നു. നിർദ്ദിഷ്ട പ്രോട്ടോക്കോൾ ഉള്ളടക്കം പട്ടിക 3.6 ൽ കാണിച്ചിരിക്കുന്നു.
പട്ടിക 3.6 സ്റ്റാറ്റസ് സെറ്റിംഗ് ഫ്രെയിം
| കമാൻഡ് നാമം | സ്റ്റാറ്റസ് സെറ്റിംഗ് കമാൻഡ് | |||
| അയയ്ക്കുന്ന നോഡ് | നോഡ് സ്വീകരിക്കുന്നു | ID | സൈക്കിൾ (മിസെ) | സമയപരിധി സ്വീകരിക്കുക |
| തീരുമാനമെടുക്കൽ നിയന്ത്രണ യൂണിറ്റ് | ചേസിസ് നോഡ് | 0x441 | ഒന്നുമില്ല | ഒന്നുമില്ല |
| ഡാറ്റ ദൈർഘ്യം | 0x01 | |||
| സ്ഥാനം | ഫംഗ്ഷൻ | ഡാറ്റ തരം | വിവരണം | |
| ബൈറ്റ് [0] | മായ്ക്കുന്നതിൽ പിശക് കമാൻഡ് | ഒപ്പിടാത്ത int8 | 0x00 എല്ലാ പിശകുകളും മായ്ക്കുക 0x01 മോട്ടോർ 1 ന്റെ പിശക് മായ്ക്കുക 0x02 മോട്ടോർ 2 ന്റെ പിശക് മായ്ക്കുക |
കുറിപ്പ് 3: എസ്ampലെ ഡാറ്റ; ഇനിപ്പറയുന്ന ഡാറ്റ പരീക്ഷണ ആവശ്യങ്ങൾക്ക് മാത്രമുള്ളതാണ്
1. വാഹനം 0.15/S വേഗതയിൽ മുന്നേറുന്നു
| ബൈറ്റ് [0] | ബൈറ്റ് [1] | ബൈറ്റ് [2] | ബൈറ്റ് [3] | ബൈറ്റ് [4] | ബൈറ്റ് [5] | ബൈറ്റ് [6] | ബൈറ്റ് [7] |
| 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 |
2. വാഹനം 0.2RAD/S ൽ കറങ്ങുന്നു
| ബൈറ്റ് [0] | ബൈറ്റ് [1] | ബൈറ്റ് [2] | ബൈറ്റ് [3] | ബൈറ്റ് [4] | ബൈറ്റ് [5] | ബൈറ്റ് [6] | ബൈറ്റ് [7] |
| 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 |
ചേസിസ് സ്റ്റാറ്റസ് വിവരങ്ങൾക്ക് പുറമേ, ഷാസി ഫീഡ്ബാക്ക് വിവരങ്ങളിൽ മോട്ടോർ ഡാറ്റയും സെൻസർ ഡാറ്റയും ഉൾപ്പെടുന്നു.
പട്ടിക 3.7 മോട്ടോർ സ്പീഡ് നിലവിലെ സ്ഥാനം വിവരങ്ങൾ ഫീഡ്ബാക്ക്
| കമാൻഡ് നാമം | മോട്ടോർ ഡ്രൈവ് ഹൈ സ്പീഡ് ഇൻഫർമേഷൻ ഫീഡ്ബാക്ക് ഫ്രെയിം | |||
| അയയ്ക്കുന്ന നോഡ് | നോഡ് സ്വീകരിക്കുന്നു | ID | സമയം സ്വീകരിക്കുക- ഔട്ട്(മിസെ) | |
| സ്റ്റെയർ-ബൈ-വയർ ചേസിസ് | തീരുമാനമെടുക്കൽ നിയന്ത്രണ യൂണിറ്റ് | 0x251-0x254 | 20മി.എസ് | ഒന്നുമില്ല |
| ഡാറ്റ നീളം | ഒക്സക്സനുമ്ക്സ | |||
| സ്ഥാനം | ഫംഗ്ഷൻ | – | വിവരണം | |
| ബൈറ്റ് [0] ബൈറ്റ് [1] | മോട്ടോർ സ്പീഡ് 8 ബിറ്റ് കൂടുതലാണ് മോട്ടോർ സ്പീഡ് 8 ബിറ്റുകൾ കുറവാണ് | int16 ഒപ്പിട്ടു | നിലവിലുള്ളത് മോട്ടോർ വേഗത യൂണിറ്റ് ആർപിഎം | |
| ബൈറ്റ് [2] | സംവരണം | – | ഒക്സക്സനുമ്ക്സ | |
| ബൈറ്റ് [3] | ഡ്രൈവ് താപനില 8 ബിറ്റുകൾ ആണ് താഴ്ന്നത് | – | യൂണിറ്റ് 1 ടി | |
| ബൈറ്റ് [4] | സംവരണം | – | ഒക്സക്സനുമ്ക്സ | |
| ബൈറ്റ് [5] | ഡ്രൈവ് നില | – | വിശദാംശങ്ങൾക്ക് പട്ടിക 3.9 കാണുക | |
| ബൈറ്റ് [6] | സംവരണം | – | ഒക്സക്സനുമ്ക്സ | |
| ബൈറ്റ് [7] | സംവരണം | – | 0x00 |
പട്ടിക 3.8 മോട്ടോർ താപനില, വാല്യംtagഇ, സ്റ്റാറ്റസ് ഇൻഫർമേഷൻ ഫീഡ്ബാക്ക്
| കമാൻഡ് നാമം | മോട്ടോർ ഡ്രൈവ് ലോ സ്പീഡ് ഇൻഫർമേഷൻ ഫീഡ്ബാക്ക് ഫ്രെയിം | ||
| അയയ്ക്കുന്നു ഞാൻ നോഡ് നോഡ് സ്വീകരിക്കുന്നു | ID | സൈക്കിൾ :ms) | സമയപരിധി (മിസെ) സ്വീകരിക്കുക |
| സ്റ്റിയർ-ബൈ- ഡെഡ്ഷൻ- വയർ നിർമ്മാണ നിയന്ത്രണം | ചേസിസ് യൂണിറ്റ് 0x261-0x264 | ഒന്നുമില്ല | ഒന്നുമില്ല |
| ഡാറ്റ 0x08 നീളം | |||
| സ്ഥാനം I ഫംഗ്ഷൻ | വിവരണം | ||
| ബൈറ്റ് [0] ബൈറ്റ് [1] | സംവരണം സംവരണം | ഓക്സ്00 0x00 | |
| ബൈറ്റ് [2] ബൈറ്റ് [3] | ഡ്രൈവ് താപനില 8 ആണ് ബിറ്റുകൾ ഉയർന്ന ഡ്രൈവ് താപനില 8 ബിറ്റുകൾ കുറവാണ് | int16 ഒപ്പിട്ടു | യൂണിറ്റ് 1℃ |
| ബൈറ്റ് [4] | സംവരണം | ഒക്സക്സനുമ്ക്സ | |
| ബൈറ്റ് [5] | ഡ്രൈവ് നില | ഒപ്പിടാത്ത int8 | പട്ടിക കാണുക വിശദാംശങ്ങൾക്ക് 3.9 |
| ബൈറ്റ് [6] | സംവരണം | – | ഒക്സക്സനുമ്ക്സ |
| ബൈറ്റ് [7] | സംവരണം | – | 0x00 |
പട്ടിക 3.9 ഡ്രൈവ് നില
| ബൈറ്റ് | ബിറ്റ് | വിവരണം |
| ബൈറ്റ് [5] | ബിറ്റ് [0] | വൈദ്യുതി വിതരണ വോളിയംtage വളരെ കുറവാണ് (0:സാധാരണ 1:വളരെ കുറവാണ്) |
| ബിറ്റ് [1] | മോട്ടോർ അമിതമായി ചൂടാക്കിയിട്ടുണ്ടോ (0: സാധാരണ 1: അമിതമായി ചൂടായത്) | |
| ബിറ്റ് [2] | സംവരണം | |
| ബിറ്റ് [3] | സംവരണം | |
| ബിറ്റ് [4] | സംവരണം | |
| ബിറ്റ് [5] | സംവരണം | |
| ബിറ്റ് [6] | സംവരണം | |
| ബിറ്റ് [7] | സംവരണം |
പട്ടിക 3.10 ഓഡോമീറ്റർ ഫീഡ്ബാക്ക് ഫ്രെയിം
| കമാൻഡ് നാമം | ഓഡോമീറ്റർ വിവര ഫീഡ്ബാക്ക് ഫ്രെയിം | |||
| അയയ്ക്കുന്നു നോഡ് | നോഡ് സ്വീകരിക്കുന്നു | ID | സൈക്കിൾ (മിസെ) | കാലഹരണപ്പെടൽ (മിസെ) സ്വീകരിക്കുക |
| സ്റ്റിയർ-ബൈ- ചേസിസ് | തീരുമാനമെടുക്കൽ നിയന്ത്രണ യൂണിറ്റ് | 0x311 | 20മി.എസ് | ഒന്നുമില്ല |
| ഡാറ്റ ദൈർഘ്യം | ഒക്സക്സനുമ്ക്സ | |||
| സ്ഥാനം | ഫംഗ്ഷൻ | ഡാറ്റ തരം | വിവരണം | |
| ബൈറ്റ് [0] ബൈറ്റ് [1] ബൈറ്റ് [2] ബൈറ്റ് [3] | ഇടത് വീൽ ഓഡോമീറ്ററിന്റെ ഏറ്റവും ഉയർന്ന ബിറ്റ്, ഇടത് വീൽ ഓഡോമീറ്ററിന്റെ രണ്ടാമത്തെ ഉയർന്ന ബിറ്റ് രണ്ടാമത്തെ കുറഞ്ഞ ബിറ്റ് ഇടത് വീൽ ഓഡോമീറ്ററിന്റെ ഇടത് വീൽ ഓഡോമീറ്ററിന്റെ ഏറ്റവും താഴ്ന്ന ബിറ്റ് | int32 ഒപ്പിട്ടു | ചേസിസ് ലെഫ്റ്റ് വീൽ ഓഡോമീറ്റർ ഫീഡ്ബാക്ക് യൂണിറ്റ്: എംഎം | |
| ബൈറ്റ് [4] ബൈറ്റ് [5] ബൈറ്റ് [6] ബൈറ്റ് 17) | ഏറ്റവും ഉയർന്ന അവകാശം വീൽ ഓഡോമീറ്റർ രണ്ടാമത്തെ ഉയർന്ന ബിറ്റ് വലത് വീൽ ഓഡോമീറ്ററിന്റെ രണ്ടാമത്തെ - വലത് വീൽ ഓഡോമീറ്ററിന്റെ ഏറ്റവും കുറഞ്ഞ ബിറ്റ് വലത്തിന്റെ ഏറ്റവും താഴ്ന്ന ഭാഗം വീൽ ഓഡോമീറ്റർ | int32 ഒപ്പിട്ടു യൂണിറ്റ്: എംഎം | ചേസിസ് വലത് വീൽ ഓഡോമീറ്റർ പ്രതികരണം |
പട്ടിക 3.11 റിമോട്ട് കൺട്രോൾ ഇൻഫർമേഷൻ ഫീഡ്ബാക്ക്
| കമാൻഡ് നാമം | റിമോട്ട് കൺട്രോൾ വിവരങ്ങൾ | |||
| അയയ്ക്കുന്ന നോഡ് | നോഡ് സ്വീകരിക്കുന്നു | ID | സൈക്കിൾ (മി.സെ. / | സമയപരിധി സ്വീകരിക്കുക (മിസെ) |
| സ്റ്റെയർ-ബൈവയർ ചേസിസ് | തീരുമാനമെടുക്കൽ നിയന്ത്രണ യൂണിറ്റ് | 0x241 | 20മി.എസ് | ഒന്നുമില്ല |
| ഡാറ്റ നീളം | 0x08 | |||
| സ്ഥാനം | ഫംഗ്ഷൻ | ഡാറ്റ തരം | വിവരണം | |
| ബൈറ്റ് [0] | റിമോട്ട് കൺട്രോൾ SW പ്രതികരണം | ഒപ്പിടാത്ത int8 | ബിറ്റ്[0-1]: SWA 2-അപ്പ് 3-ഡൗൺ ബിറ്റ്[2-3]: SWB: 2-അപ്പ് 1-മിഡിൽ 3-ഡൗൺ bit14-51: SWC: 2-അപ്പ് 1-മിഡിൽ 3-ഡൗൺ ബിറ്റ്[6-71: SWD: 2-അപ്പ് 3-ഡൗൺ | |
| hY1e [1] | വലത് ലിവർ ഇടത് എ | int8 ഒപ്പിട്ടു | പരിധി: (-100.100) | |
| ബൈറ്റ് [2] | വലത് ലിവർ ഇടത്തും വലത്തും | int8 ഒപ്പിട്ടു | പരിധി:[-100.100] | |
| ബൈറ്റ് [3] | ഇടത് ലിവർ മുകളിലേക്കും താഴേക്കും | int8 ഒപ്പിട്ടു | പരിധി: (-100.100] | |
| ബൈറ്റ് [4] | ഇടത് ലിവർ ഇടത്തും വലത്തും | int8 ഒപ്പിട്ടു | പരിധി: (-100.100] | |
| ബൈറ്റ് ഐഎസ്ഐ | ഇടത് നോബ് വി.ആർ.എ | int8 ഒപ്പിട്ടു | പരിധി: (-100.100) | |
| ബൈറ്റ് [6] | സംവരണം | — | 0x00 | |
| ബൈറ്റ് (71 | ചെക്ക് എണ്ണുക | ഒപ്പിടാത്ത int8 | 0-255 സൈക്കിൾ എണ്ണം |
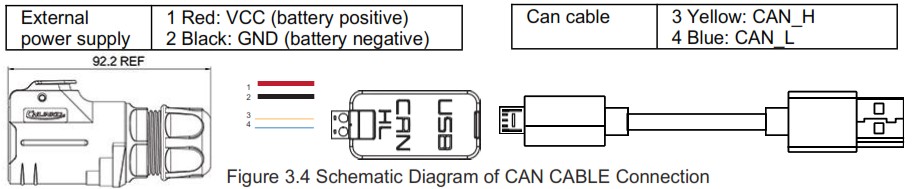
CAN കേബിൾ കണക്ഷൻ
BUNKERPRO, ചിത്രം 3.2-ൽ കാണിച്ചിരിക്കുന്നതുപോലെ ഒരു ഏവിയേഷൻ പ്ലഗ് പുരുഷ കണക്റ്റർ ഉപയോഗിച്ചാണ് അയച്ചിരിക്കുന്നത്. കേബിളിന്റെ നിർവചനം: മഞ്ഞയാണ് CANH, നീലയാണ് CANL, ചുവപ്പ് പവർ പോസിറ്റീവ്, കറുപ്പ് പവർ നെഗറ്റീവ്.
ശ്രദ്ധിക്കുക: നിലവിലെ BUNKERPRO പതിപ്പിൽ, ബാഹ്യ എക്സ്റ്റൻഷൻ ഇന്റർഫേസ് റിയർ ഇന്റർഫേസിലേക്ക് മാത്രമേ തുറന്നിട്ടുള്ളൂ. ഈ പതിപ്പിൽ, വൈദ്യുതി വിതരണത്തിന് പരമാവധി 10A കറന്റ് നൽകാൻ കഴിയും.

CAN കമാൻഡ് നിയന്ത്രണത്തിന്റെ സാക്ഷാത്കാരം
BUNKERPRO മൊബൈൽ റോബോട്ട് ചേസിസ് സാധാരണ രീതിയിൽ ആരംഭിക്കുക, FS റിമോട്ട് കൺട്രോൾ ഓണാക്കുക, തുടർന്ന് കൺട്രോൾ മോഡ് കമാൻഡ് കൺട്രോളിലേക്ക് മാറ്റുക, അതായത്, FS റിമോട്ട് കൺട്രോളിന്റെ SWB മോഡ് തിരഞ്ഞെടുക്കൽ മുകളിലേക്ക് തിരിക്കുക. ഈ സമയത്ത്, BUNKERPRO ചേസിസ് CAN ഇന്റർഫേസിൽ നിന്നുള്ള കമാൻഡ് സ്വീകരിക്കും, കൂടാതെ ഹോസ്റ്റിന് അതേ സമയം CAN ബസ് നൽകുന്ന തത്സമയ ഡാറ്റയിലൂടെ ചേസിസിന്റെ നിലവിലെ അവസ്ഥ വിശകലനം ചെയ്യാനും കഴിയും. നിർദ്ദിഷ്ട പ്രോട്ടോക്കോൾ ഉള്ളടക്കത്തിനായി CAN ആശയവിനിമയ പ്രോട്ടോക്കോൾ കാണുക.
ഫേംവെയർ നവീകരണം (ഇതുവരെ തുറന്നിട്ടില്ല)
BUNKERPRO ഉപയോഗിക്കുന്ന ഫേംവെയർ പതിപ്പ് അപ്ഗ്രേഡ് ചെയ്യാനും ഉപഭോക്താക്കൾക്ക് കൂടുതൽ പൂർണ്ണമായ അനുഭവം നൽകാനും ഉപയോക്താക്കൾക്ക് സൗകര്യമൊരുക്കുന്നതിനായി, BUNKERPRO ഫേംവെയർ അപ്ഗ്രേഡിനും അനുബന്ധ ക്ലയന്റ് സോഫ്റ്റ്വെയറിനുമായി ഒരു ഹാർഡ്വെയർ ഇന്റർഫേസ് നൽകുന്നു. ക്ലയന്റ് ഇന്റർഫേസ് ചിത്രം 3.3 ൽ കാണിച്ചിരിക്കുന്നു.
നവീകരണ തയ്യാറെടുപ്പ്
- സീരിയൽ കേബിൾ X 1
- USB മുതൽ സീരിയൽ പോർട്ട് X 1 വരെ
- ബങ്കർപ്രോ ചേസിസ് X 1
- കമ്പ്യൂട്ടർ (WINDOWS ഓപ്പറേറ്റിംഗ് സിസ്റ്റം) X 1
ഫേംവെയർ അപ്ഗ്രേഡ് സോഫ്റ്റ്വെയർ - https://github.com/agilexrobotics/agilex_firmware
- ബന്ധിപ്പിക്കുന്നതിന് മുമ്പ് റോബോട്ട് ചേസിസിന്റെ പവർ സപ്ലൈ വിച്ഛേദിച്ചിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക;
- BUNKERPRO ചേസിസ് അപ്ഗ്രേഡ് സീരിയൽ പോർട്ടിലേക്ക് കണക്റ്റുചെയ്യാൻ സീരിയൽ കേബിൾ ഉപയോഗിക്കുക (പിൻ ഇലക്ട്രിക്കൽ ബോർഡിന്റെ ഡിസ്അസംബ്ലിംഗ് ആവശ്യമാണ്); കമ്പ്യൂട്ടറിലേക്ക് സീരിയൽ കേബിൾ ബന്ധിപ്പിക്കുക;
- ക്ലയന്റ് സോഫ്റ്റ്വെയർ തുറക്കുക;
- പോർട്ട് നമ്പർ തിരഞ്ഞെടുക്കുക;
- UNKERPRO ചേസിസ് ഓൺ ചെയ്ത് ഉടൻ തന്നെ "കണക്ഷൻ ആരംഭിക്കുക" ക്ലിക്കുചെയ്യുക (പവർ ചെയ്യുന്നതിന് മുമ്പ് ചേസിസ് 3S കാത്തിരിക്കും; സമയം 6S കവിയുന്നുവെങ്കിൽ, അത് ആപ്ലിക്കേഷനിൽ പ്രവേശിക്കും); കണക്ഷൻ വിജയകരമാണെങ്കിൽ, ടെക്സ്റ്റ് ബോക്സ് "വിജയകരമായി കണക്റ്റുചെയ്തു" എന്ന് ആവശ്യപ്പെടും;
- ലോഡ് ബിൻ file;
- അപ്ഗ്രേഡ് ബട്ടണിൽ ക്ലിക്കുചെയ്ത് അപ്ഗ്രേഡ് പൂർത്തീകരണത്തിന്റെ പ്രോംപ്റ്റിനായി കാത്തിരിക്കുക;
- സീരിയൽ കേബിൾ വിച്ഛേദിക്കുക, ചേസിസ് ഓഫ് ചെയ്യുക, വീണ്ടും പവർ ഓണാക്കുക.

ചിത്രം 3.3 ഫേംവെയർ അപ്ഗ്രേഡിന്റെ ക്ലയന്റ് ഇന്റർഫേസ്
BUNKERPRO ROS പാക്കേജ് ഉപയോഗിക്കുക Example
ഹാർഡ്വെയർ അബ്സ്ട്രാക്ഷൻ, ലോ-ലെവൽ ഉപകരണ നിയന്ത്രണം, പൊതുവായ ഫംഗ്ഷനുകൾ നടപ്പിലാക്കൽ, ഇന്റർ-പ്രോസസ് സന്ദേശം, ഡാറ്റ പാക്കറ്റ് മാനേജ്മെന്റ് എന്നിവ പോലുള്ള ചില സ്റ്റാൻഡേർഡ് ഓപ്പറേറ്റിംഗ് സിസ്റ്റം സേവനങ്ങൾ ROS നൽകുന്നു. ROS ഒരു ഗ്രാഫ് ആർക്കിടെക്ചറിനെ അടിസ്ഥാനമാക്കിയുള്ളതാണ്, അതിനാൽ വ്യത്യസ്ത നോഡുകളുടെ പ്രക്രിയകൾക്ക് വിവിധ വിവരങ്ങൾ (സെൻസിംഗ്, കൺട്രോൾ, സ്റ്റാറ്റസ്, പ്ലാനിംഗ് മുതലായവ) സ്വീകരിക്കാനും റിലീസ് ചെയ്യാനും കൂട്ടിച്ചേർക്കാനും കഴിയും. നിലവിൽ ROS പ്രധാനമായും UBUNTU-നെ പിന്തുണയ്ക്കുന്നു.
വികസന തയ്യാറെടുപ്പ്
ഹാർഡ്വെയർ തയ്യാറാക്കൽ
- CAN ലൈറ്റിന് കമ്മ്യൂണിക്കേഷൻ മോഡ്യൂൾ X1
- തിങ്ക് പാഡ് E470 നോട്ട്ബുക്ക് X1 AGILEX BUNKERPRO മൊബൈൽ റോബോട്ട് ചേസിസ് X1
- റിമോട്ട് കൺട്രോൾ FS-i6s X1 പിന്തുണയ്ക്കുന്ന AGILEX BUNKERPRO
- AGILEX BUNKERPRO മുൻനിര ഏവിയേഷൻ സോക്കറ്റ് X1
Ex ഉപയോഗിക്കുകampപരിസ്ഥിതി വിവരണം
- ഉബുണ്ടു 16.04 LTS (ഇതൊരു പരീക്ഷണ പതിപ്പാണ്, ഉബുണ്ടു 18.04 LTS-ൽ പരീക്ഷിച്ചു)
- ROS കൈനറ്റിക് (തുടർന്നുള്ള പതിപ്പുകളും പരീക്ഷിക്കപ്പെടുന്നു)
- Git
ഹാർഡ്വെയർ കണക്ഷനും തയ്യാറെടുപ്പും
- BUNKERPRO ടോപ്പ് ഏവിയേഷൻ പ്ലഗിന്റെ അല്ലെങ്കിൽ ടെയിൽ പ്ലഗിന്റെ CAN കേബിൾ പുറത്തേക്ക് നയിക്കുക, CAN കേബിളിലെ CAN_H, CAN_L എന്നിവ യഥാക്രമം CAN_TO_USB അഡാപ്റ്ററിലേക്ക് ബന്ധിപ്പിക്കുക;
- BUNKERPRO മൊബൈൽ റോബോട്ട് ചേസിസിലെ നോബ് സ്വിച്ച് ഓണാക്കുക, ഇരുവശത്തുമുള്ള എമർജൻസി സ്റ്റോപ്പ് സ്വിച്ചുകൾ റിലീസ് ചെയ്തിട്ടുണ്ടോയെന്ന് പരിശോധിക്കുക;
- നോട്ട്ബുക്കിന്റെ യുഎസ്ബി ഇന്റർഫേസിലേക്ക് CAN_TO_USB കണക്റ്റുചെയ്യുക. കണക്ഷൻ ഡയഗ്രം ചിത്രം 3.4 ൽ കാണിച്ചിരിക്കുന്നു.
ROS ഇൻസ്റ്റാളേഷനും പരിസ്ഥിതി ക്രമീകരണവും
ഇൻസ്റ്റാളേഷൻ വിശദാംശങ്ങൾക്ക്, ദയവായി റഫർ ചെയ്യുക http://wiki.ros.org/kinetic/Installa-tion/Ubuntu
CANABLE ഹാർഡ്വെയറും CAN ആശയവിനിമയവും പരീക്ഷിക്കുക
CAN-TO-USB അഡാപ്റ്റർ സജ്ജമാക്കുക
- gs_usb കേർണൽ മൊഡ്യൂൾ $ sudo modprobe gs_usb പ്രവർത്തനക്ഷമമാക്കുക
- 500k ബോഡ് നിരക്ക് സജ്ജീകരിച്ച് can-to-usb അഡാപ്റ്റർ പ്രവർത്തനക്ഷമമാക്കുക $ sudo ip ലിങ്ക് സെറ്റ് can0 up തരത്തിന് 500000 ബിറ്റ്റേറ്റ് ചെയ്യാം
- മുമ്പത്തെ ഘട്ടങ്ങളിൽ ഒരു പിശകും സംഭവിച്ചില്ലെങ്കിൽ, നിങ്ങൾക്ക് കമാൻഡ് ഉപയോഗിക്കാനാകും view ക്യാൻ ഉപകരണങ്ങൾ ഉടനടി $ ifconfig -a
- ഹാർഡ്വെയർ $ sudo apt install can-utils പരീക്ഷിക്കാൻ can-utils ഇൻസ്റ്റാൾ ചെയ്ത് ഉപയോഗിക്കുക
- ഈ സമയം BUNKERPRO റോബോട്ടിലേക്ക് can-to-usb കണക്റ്റുചെയ്തിരിക്കുകയും വാഹനം ഓണായിരിക്കുകയും ചെയ്തിട്ടുണ്ടെങ്കിൽ, BUNKERPRO ചേസിസ് $ candump can0-ൽ നിന്നുള്ള ഡാറ്റ നിരീക്ഷിക്കാൻ ഇനിപ്പറയുന്ന കമാൻഡുകൾ ഉപയോഗിക്കുക
- റഫറൻസ് ഉറവിടങ്ങൾ:
[1]https://github.com/agilexrobotics/agx_sdk
[2]https://wiki.rdu.im/_pages/Notes/Embed-dedSystem/Linux/can-bus-in-linux.html - റോസ് ആശ്രിത പാക്കേജ് ഡൗൺലോഡ് ചെയ്യുക
AGILEX BUNKERPRO ROS പാക്കേജ് ഡൗൺലോഡ് ചെയ്ത് കംപൈൽ ചെയ്യുക
$ sudo apt install ros-$ROS_DISTRO-teleop-twist-key-board
$ sudo apt ഇൻസ്റ്റാൾ libasio-dev
• bunker_ros സോഴ്സ് കോഡ് ക്ലോൺ ചെയ്ത് കംപൈൽ ചെയ്യുക
$ cd ~/catkin_ws/src
$ git ക്ലോൺ https://github.com/agilexrobotics/ugv_sdk.git
$ git ക്ലോൺ https://github.com/agilexrobotics/bunker_ros.git
$cd..
$ catkin_make
റഫറൻസ് ഉറവിടം:
https://github.com/agilexrobotics/bunker_ros
ROS നോഡുകൾ ആരംഭിക്കുക
- അടിസ്ഥാന നോഡ് ആരംഭിക്കുക
$ roslaunch bunker_bringup bunker_minimal.launch - കീബോർഡ് റിമോട്ട് ഓപ്പറേഷൻ നോഡ് ആരംഭിക്കുക
$ roslaunch bunker_bringup bunker_teleop_keyboard.launch
മുൻകരുതലുകൾ
ഈ വിഭാഗത്തിൽ BUNKERPRO ഉപയോഗിക്കുന്നതിനും വികസിപ്പിക്കുന്നതിനുമുള്ള ചില മുൻകരുതലുകൾ അടങ്ങിയിരിക്കുന്നു.
ബാറ്ററി മുൻകരുതലുകൾ
- BUNKERPRO ഫാക്ടറിയിൽ നിന്ന് പുറത്തുപോകുമ്പോൾ, ബാറ്ററി പൂർണ്ണമായി ചാർജ് ചെയ്യപ്പെടുന്നില്ല. വോളിയം വഴി നിർദ്ദിഷ്ട ബാറ്ററി പവർ പ്രദർശിപ്പിക്കാൻ കഴിയുംtagE BUNKERPRO ചേസിസിന്റെ പിൻഭാഗത്തുള്ള ഡിസ്പ്ലേ മീറ്റർ അല്ലെങ്കിൽ CAN ബസ് കമ്മ്യൂണിക്കേഷൻ ഇന്റർഫേസിലൂടെ വായിക്കുക;
- ബാറ്ററിയുടെ പവർ തീർന്നതിന് ശേഷം ദയവായി ചാർജ് ചെയ്യരുത്. വോളിയം കുറഞ്ഞ സമയത്ത് അത് ചാർജ് ചെയ്യുകtage BUNKERPRO പിൻഭാഗത്ത് 48V യിൽ കുറവാണ്; സ്റ്റാറ്റിക് സ്റ്റോറേജ് അവസ്ഥകൾ: ബാറ്ററി സംഭരണത്തിനുള്ള ഏറ്റവും മികച്ച എമ്പറേച്ചർ -10°C~45°C ആണ്; ഉപയോഗശൂന്യമായ സംഭരണത്തിന്റെ കാര്യത്തിൽ, ബാറ്ററി റീചാർജ് ചെയ്യുകയും 1 മാസത്തിലൊരിക്കൽ ഡിസ്ചാർജ് ചെയ്യുകയും വേണം, തുടർന്ന് പൂർണ്ണ വോളിയത്തിൽ സംഭരിക്കുകയും വേണം.tagഇ സംസ്ഥാനം. ദയവായി ബാറ്ററിക്ക് തീയിടുകയോ ബാറ്ററി ചൂടാക്കുകയോ ചെയ്യരുത്, ഉയർന്ന താപനിലയുള്ള അന്തരീക്ഷത്തിൽ ബാറ്ററി സൂക്ഷിക്കരുത്;
- ചാർജിംഗ്: ഒരു പ്രത്യേക ലിഥിയം ബാറ്ററി ചാർജർ ഉപയോഗിച്ച് ബാറ്ററി ചാർജ് ചെയ്യണം. ബാറ്ററി 0 ഡിഗ്രി സെൽഷ്യസിൽ താഴെ ചാർജ് ചെയ്യരുത്, നിലവാരമില്ലാത്ത ബാറ്ററികൾ, പവർ സപ്ലൈകൾ, ചാർജറുകൾ എന്നിവ ഉപയോഗിക്കരുത്.
പ്രവർത്തന അന്തരീക്ഷത്തിനായുള്ള മുൻകരുതലുകൾ
- BUNKERPRO-യുടെ പ്രവർത്തന താപനില 20℃~60℃ ആണ്; താപനില 20 ഡിഗ്രിയിൽ താഴെയോ 60 ഡിഗ്രി സെൽഷ്യസിൽ കൂടുതലോ ഉള്ള അന്തരീക്ഷത്തിൽ ദയവായി ഇത് ഉപയോഗിക്കരുത്;
- BUNKERPRO-യുടെ പ്രവർത്തന അന്തരീക്ഷത്തിന്റെ ആപേക്ഷിക ആർദ്രത ആവശ്യകതകൾ ഇവയാണ്: പരമാവധി 80%, കുറഞ്ഞത് 30%;
- വിനാശകരവും കത്തുന്നതുമായ വാതകം ഉള്ള അന്തരീക്ഷത്തിലോ കത്തുന്ന പദാർത്ഥങ്ങൾക്ക് സമീപമുള്ള അന്തരീക്ഷത്തിലോ ദയവായി ഇത് ഉപയോഗിക്കരുത്;
- ഹീറ്ററുകൾ അല്ലെങ്കിൽ വലിയ കോയിൽഡ് റെസിസ്റ്ററുകൾ പോലുള്ള ചൂടാക്കൽ ഘടകങ്ങൾക്ക് ചുറ്റും ഇത് സൂക്ഷിക്കരുത്;
- പ്രവർത്തന അന്തരീക്ഷത്തിന്റെ ഉയരം 1000M കവിയാൻ പാടില്ല എന്ന് ശുപാർശ ചെയ്യുന്നു; പ്രവർത്തന പരിതസ്ഥിതിയിൽ രാവും പകലും തമ്മിലുള്ള താപനില വ്യത്യാസം 25 ° C കവിയാൻ പാടില്ല എന്ന് ശുപാർശ ചെയ്യുന്നു;
- ട്രാക്ക് ടെൻഷൻ വീൽ പതിവായി പരിശോധിക്കുകയും പരിപാലിക്കുകയും ചെയ്യുക.
വൈദ്യുത ബാഹ്യ വിപുലീകരണത്തിനുള്ള മുൻകരുതലുകൾ
- റിയർ എക്സ്റ്റൻഷൻ പവർ സപ്ലൈയുടെ കറന്റ് 10A കവിയാൻ പാടില്ല, മൊത്തം വൈദ്യുതി 480W കവിയാൻ പാടില്ല;
സുരക്ഷാ മുൻകരുതലുകൾ
- ഉപയോഗ സമയത്ത് എന്തെങ്കിലും സംശയങ്ങൾ ഉണ്ടായാൽ, ദയവായി ബന്ധപ്പെട്ട നിർദ്ദേശ മാനുവൽ പിന്തുടരുക അല്ലെങ്കിൽ ബന്ധപ്പെട്ട സാങ്കേതിക ഉദ്യോഗസ്ഥരെ സമീപിക്കുക;
- ഉപയോഗിക്കുന്നതിന് മുമ്പ്, ഫീൽഡ് അവസ്ഥ ശ്രദ്ധിക്കുക, ഉദ്യോഗസ്ഥരുടെ സുരക്ഷാ പ്രശ്നത്തിന് കാരണമാകുന്ന തെറ്റായ പ്രവർത്തനം ഒഴിവാക്കുക;
- അടിയന്തിര സാഹചര്യങ്ങളിൽ, എമർജൻസി സ്റ്റോപ്പ് ബട്ടൺ അമർത്തി ഉപകരണങ്ങൾ ഓഫ് ചെയ്യുക;
- സാങ്കേതിക പിന്തുണയും അനുമതിയും കൂടാതെ, ആന്തരിക ഉപകരണ ഘടനയിൽ വ്യക്തിപരമായി മാറ്റം വരുത്തരുത്.
മറ്റ് മുൻകരുതലുകൾ
- വാഹനം കൊണ്ടുപോകുമ്പോഴും സജ്ജീകരിക്കുമ്പോഴും താഴെയിടുകയോ തലകീഴായി ഇടുകയോ ചെയ്യരുത്;
- പ്രൊഫഷണലല്ലാത്തവർക്ക്, അനുമതിയില്ലാതെ വാഹനം ഡിസ്അസംബ്ലിംഗ് ചെയ്യരുത്.
ചോദ്യോത്തരം
- ആദ്യം, പവർ സ്വിച്ച് അമർത്തിയോ എന്ന് സ്ഥിരീകരിക്കുക; തുടർന്ന്, റിമോട്ട് കൺട്രോളിന്റെ മുകളിൽ ഇടതുവശത്തുള്ള മോഡ് തിരഞ്ഞെടുക്കൽ സ്വിച്ച് വഴി തിരഞ്ഞെടുത്ത കൺട്രോൾ മോഡ് ശരിയാണോ എന്ന് സ്ഥിരീകരിക്കുക.
- സാധാരണ സാഹചര്യങ്ങളിൽ, റിമോട്ട് കൺട്രോൾ ഉപയോഗിച്ച് BUNKERPRO നിയന്ത്രിക്കാൻ കഴിയുമെങ്കിൽ, ചേസിസ് ചലന നിയന്ത്രണം സാധാരണമാണെന്ന് അർത്ഥമാക്കുന്നു; അതിന് ചേസിസിന്റെ ഫീഡ്ബാക്ക് ഫ്രെയിം സ്വീകരിക്കാൻ കഴിയുമെങ്കിൽ, CAN വിപുലീകരണ ലിങ്ക് സാധാരണമാണെന്ന് അർത്ഥമാക്കുന്നു. കമാൻഡ് കൺട്രോൾ മോഡിലേക്ക് മാറിയിട്ടുണ്ടോയെന്ന് പരിശോധിക്കുക.
- ബങ്കർപ്രോയ്ക്ക് ഉള്ളിൽ ഒരു ആശയവിനിമയ സംരക്ഷണ സംവിധാനം ഉണ്ട്. പുറത്ത് നിന്ന് CAN കൺട്രോൾ കമാൻഡുകൾ പ്രോസസ്സ് ചെയ്യുമ്പോൾ ഷാസിക്ക് ഒരു ടൈംഔട്ട് പ്രൊട്ടക്ഷൻ മെക്കാനിസം ഉണ്ട്. വാഹനത്തിന് കമ്മ്യൂണിക്കേഷൻ പ്രോട്ടോക്കോളിന്റെ ഒരു ഫ്രെയിം ലഭിച്ച ശേഷം, എന്നാൽ 500MS-ൽ കൂടുതൽ നിയന്ത്രണ കമാൻഡിന്റെ അടുത്ത ഫ്രെയിം ലഭിച്ചില്ലെങ്കിൽ, അത് ആശയവിനിമയ പരിരക്ഷയിൽ പ്രവേശിക്കും, അതിന്റെ വേഗത 0 ആണ്. അതിനാൽ, ഹോസ്റ്റ് കമ്പ്യൂട്ടറിൽ നിന്നുള്ള കമാൻഡുകൾ നിർബന്ധമായും നൽകണം. ഇടയ്ക്കിടെ പുറപ്പെടുവിക്കും.
ഉൽപ്പന്ന അളവുകൾ
ഉൽപ്പന്ന അളവുകളുടെ ചിത്രീകരണ ഡയഗ്രം


മുകളിലെ വിപുലീകൃത പിന്തുണ അളവുകളുടെ ചിത്രീകരണ ഡയഗ്രം

AgileX Robotics (Dongguan) CO., Ltd.
WWW.AGILEX.AI
ഫോൺ: + 86-0769-22892150
മൊബൈൽ: +86-19925374409

പ്രമാണങ്ങൾ / വിഭവങ്ങൾ
 |
AgileX ബങ്കർ പ്രോ ട്രാക്ക് ചെയ്ത മൊബൈൽ റോബോട്ട് [pdf] ഉപയോക്തൃ മാനുവൽ ബങ്കർ പ്രോ ട്രാക്ക് ചെയ്ത മൊബൈൽ റോബോട്ട്, ബങ്കർ പ്രോ, ട്രാക്ക് ചെയ്ത മൊബൈൽ റോബോട്ട്, മൊബൈൽ റോബോട്ട് |



